






AOE网和关键路径
本文算是相对知识密度较大的文章,建议看的时候慢一点,并在迷惑的地方搜索其他文章。
AOE网和AOV网
一些概念
拓扑结构:拓扑本是地理上的概念,指只考虑物体间的位置关系而不考虑它们的形状和大小。拓扑结构就是某些东西之间有位置关系。
拓扑排序:给一个局部有序的拓扑结构排序。如:吃饭->睡觉,睡觉->打豆豆。在拓扑排序后则变成:吃饭->睡觉->打豆豆,这样的拓扑序列。
Activity On Vertex:用顶点表示活动,用弧表示活动间的优先关系的有向图。
活动:如吃饭睡觉打豆豆等,在企鹅的一天这个工程中都是活动。
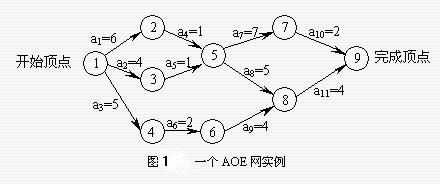
事件:类似于里程碑,标志着之前的某些活动都已经完成。如:顶点5标志活动a4,a5已完成,a7,a8可以开始了。(a7的先序活动为a4或a5)
Activity On Edge:是一个带权的有向无环图,其中,顶点表示事件(Event),弧表示活动,权表示活动持续的时间。 入度为零的顶点成为源点,出度为零的顶点称为汇点。
AOE网可以求解:
- 完成整个工期的时间。
- 为缩短工期,应加快哪些活动。
关系:AOV网常用来拓扑排序,AOE网用来规划工程计划。
关键路径
从源点到汇点具有最大长度的路径,关键路径上的所以活动都称作关键活动。
关键活动序列具有最长的总工期并决定了整个项目的最短完成时间,任何元素的延迟将直接影响项目的预期完成时间。
关键路径相关量
其中,v:vertex,e:early,l:late。
以下可以在‘最’字前加上“可以”,便于理解。如:事件可以的最早发生事件。
- 事件的最早发生时间:ve[k]
从源点开始到顶点Vk的最大路径长度(即权值的和)。
这个长度决定了从顶点Vk发出的活动能够开工的最早时间。
如:顶点5标志着活动a4、a5已完成,则以a4、a5为前序活动的a7、a8则可以开始进行。
求解:
ve[0] = 0;
ve[k] = max{ve[j] + len<Vj, Vk>}
即:从上个顶点Vj开始,ve[k]加上从该顶点到Vk顶点路径的最大值。
- 事件的最迟发生时间:vl[k]
指在不推迟整个工期的前提下,事件Vk允许的最晚发生事件。
vl[n] = ve[n]
vl[k] = min{vl[j] - len<Vk, Vj>}
即:从它的下一个顶点Vj开始,vl[j]减去该顶点到Vk顶点路径的最小值。
注:上述两个相关量求解时总是为最大或最小值,是因为某个顶点的前一个顶点或后一个顶点可能有多个。我们所说的“Vk的前一个顶点”指的是与Vk有弧,且弧头指向Vk的顶点。
- 活动的最早开始时间:e[i]
字面意思。
e[i] = ve[k]
即:e[i]等于该弧的弧尾所在顶点的ve[k]的值。
- 活动的最迟开始时间:l[i]
l[i] = vl[j] - len<Vk, Vj>
即:该弧的弧头所在顶点对应的vl[k]减去该弧的权值。
然后就可计算各个活动的时间余量(l[k] - e[k] ),时间余量为0者为关键活动。
工程规划
在求出关键路径和各个活动的时间余量后,便可做出规划:
若要保证工程完成工期较短,则关键活动必须要马不停蹄的完成。
而时间余量不为零的那些活动,则可以拖延相应的时间。
关键活动。
工程规划
在求出关键路径和各个活动的时间余量后,便可做出规划:
若要保证工程完成工期较短,则关键活动必须要马不停蹄的完成。
而时间余量不为零的那些活动,则可以拖延相应的时间。
也可通过上面求得的关键路径相关量,计算安排每个活动开始的时间范围,和整个工程的最短工期。

















 8362
8362

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









