







浅谈利用A3C玩转超级玛丽奥
前言
很早以前看过超级玛丽奥利用人工智能玩,以前感觉很高档。就写一篇吧。

github
https://github.com/yanjingke/Super-mario
什么是Actor-Critic?
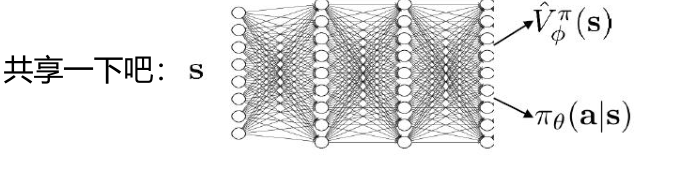
Actor-Critic,其实是用了两个网络:两个网络有一个共同点,输入状态S: 一个输出策略,负责选择动作,我们把这个网络成为Actor; 一个负责计算每个动作的分数,我们把这个网络成为Critic。
大家可以形象地想象为,Actor是舞台上的舞者,Critic是台下的评委。Actor在台上跳舞,一开始舞姿并不好看,Critic根据Actor的舞姿打分。Actor通过Critic给出的分数,去学习:如果Critic给的分数高,那么Actor会调整这个动作的输出概率;相反,如果Critic给的分数低,那么就减少这个动作输出的概率。
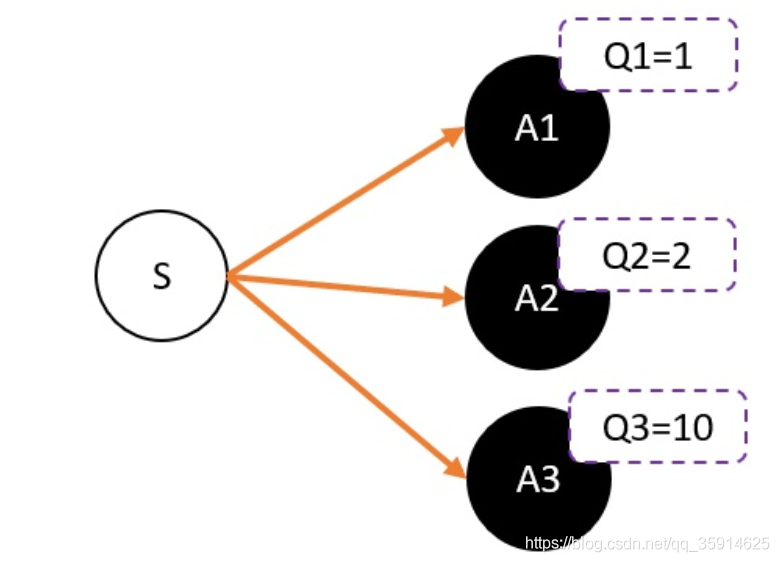
在AC中中的Critic,估算的是V值也就是一个评分,因为在强化学习中,往往没有足够的时间让我们去和环境互动。在Critic中如果预测动作评价,假设我们用Critic网络,预估到S状态下三个动作A1,A2,A3的Q值分别为1,2,10。但在开始的时候,我们采用平均策略,于是随机到A1。于是我们用策略梯度的带权重方法更新策略,这里的权重就是Q值。于是策略会更倾向于选择A1,意味着更大概率选择A1。结果A1的概率就持续升高…
这就掉进了正数陷阱。我们明明希望A3能够获得更多的机会,最后却是A1获得最多的机会。这是为什么呢?
这是因为Q值用于是一个正数,如果权重是一个正数,那么我们相当于提高对应动作的选择的概率。权重越大,我们调整的幅度将会越大。其实当我们有足够的迭代次数,这个是不用担心这个问题的。因为总会有机会抽中到权重更大的动作,因为权重比较大,抽中一次就能提高很高的概率。
但在强化学习中,往往没有足够的时间让我们去和环境互动。这就会出现由于运气不好,使得一个很好的动作没有被采样到的情况发生。要解决这个问题,我们可以通过减去一个baseline,令到权重有正有负。而通常这个baseline,我们选取的是权重的平均值。减去平均值之后,值就变成有正有负了。
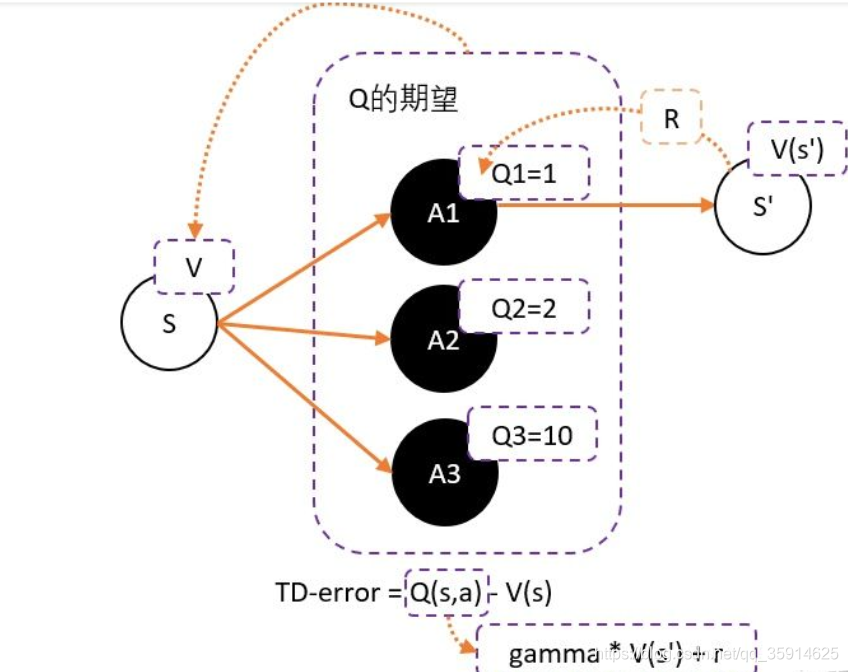
所以我们可以得到更新的权重:Q(s,a)-V(s)。然而在每次的奖励中会进行得分的衰减gamma。
总结
1、为了避免正数陷阱,我们希望Actor的更新权重有正有负。因此,我们把Q值减去他们的均值V。有:Q(s,a)-V(s)
2、为了避免需要预估V值和Q值,我们希望把Q和V统一;由于Q(s,a) = gamma * V(s’) + r - V(s)。所以我们得到TD-error公式: TD-error = gamma * V(s’) + r - V(s)
A3C算法
在A3C中有一个公共的神经网络模型,这个神经网络包括Actor网络和Critic网络两部分的功能这样加快了速度。下面有n个worker线程,每个线程里有和公共的神经网络一样的网络结构,每个线程会独立的和环境进行交互得到经验数据,这些线程之间互不干扰,独立运行。

它是怎么实现公共网络的啦?
在A3C中需要解决的问题:
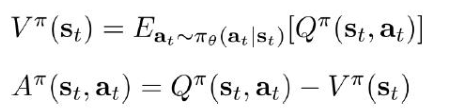
由于智能体在与环境交互过程中有大量的随机性,所以算的是期望,为了计算A,现在出现了Q和V,那我得训练俩网络了,
来个近似让问题简单些吧:

是不是不用训练两个网络啦?对

它俩好像都是根据状态来预测结果:
class ActorCritic(nn.Module):
def __init__(self, num_inputs, num_actions):
super(ActorCritic, self).__init__()
self.conv1 = nn.Conv2d(num_inputs, 32, 3, stride=2, padding=1)
self.conv2 = nn.Conv2d(32, 32, 3, stride=2, padding=1)
self.conv3 = nn.Conv2d(32, 32, 3, stride=2, padding=1)
self.conv4 = nn.Conv2d(32, 32, 3, stride=2, padding=1)
self.lstm = nn.LSTMCell(32 * 6 * 6, 512)
self.critic_linear = nn.Linear(512, 1)
self.actor_linear = nn.Linear(512, num_actions)
self._initialize_weights()
def _initialize_weights(self):
for module in self.modules():
if isinstance(module, nn.Conv2d) or isinstance(module, nn.Linear):
nn.init.xavier_uniform_(module.weight)
# nn.init.kaiming_uniform_(module.weight)
nn.init.constant_(module.bias, 0)
elif isinstance(module, nn.LSTMCell):
nn.init.constant_(module.bias_ih, 0)
nn.init.constant_(module.bias_hh, 0)
def forward(self, x, hx, cx):
x = F.relu(self.conv1(x))
x = F.relu(self.conv2(x))
x = F.relu(self.conv3(x))
x = F.relu(self.conv4(x))
# print( (hx, cx))
hx, cx = self.lstm(x.view(x.size(0), -1), (hx, cx))
return self.actor_linear(hx), self.critic_linear(hx), hx, cx#隐层和记忆单元
AC整体流程:
1.获取数据: (不断与环境交互,通过策略 )
2.前向传播计算:

3.计算梯度:

4.更新参数:
def local_train(index, opt, global_model, optimizer, save=False):
torch.manual_seed(123 + index)
if save:
start_time = timeit.default_timer()
writer = SummaryWriter(opt.log_path)
env, num_states, num_actions = create_train_env(opt.world, opt.stage, opt.action_type)#单独玩
local_model = ActorCritic(num_states, num_actions)
if opt.use_gpu:
local_model.cuda()
local_model.train()
state = torch.from_numpy(env.reset())
if opt.use_gpu:
state = state.cuda()
done = True
curr_step = 0
curr_episode = 0
while True:
if save:
if curr_episode % opt.save_interval == 0 and curr_episode > 0:
torch.save(global_model.state_dict(),
"{}/a3c_super_mario_bros_{}_{}".format(opt.saved_path, opt.world, opt.stage))
print("Process {}. Episode {}".format(index, curr_episode))
curr_episode += 1
local_model.load_state_dict(global_model.state_dict())
if done:
h_0 = torch.zeros((1, 512), dtype=torch.float)
c_0 = torch.zeros((1, 512), dtype=torch.float)
else:
h_0 = h_0.detach()
c_0 = c_0.detach()
if opt.use_gpu:
h_0 = h_0.cuda()
c_0 = c_0.cuda()
log_policies = []
values = []
rewards = []
entropies = []
for _ in range(opt.num_local_steps):
curr_step += 1
logits, value, h_0, c_0 = local_model(state, h_0, c_0)#return self.actor_linear(hx), self.critic_linear(hx), hx, cx#隐层和记忆单元
policy = F.softmax(logits, dim=1)
log_policy = F.log_softmax(logits, dim=1)
entropy = -(policy * log_policy).sum(1, keepdim=True)#计算当前熵值
#进行分布采样
m = Categorical(policy)#采样
action = m.sample().item()
state, reward, done, _ = env.step(action)
# env.render()
state = torch.from_numpy(state)
if opt.use_gpu:
state = state.cuda()
if curr_step > opt.num_global_steps:
done = True
if done:
curr_step = 0
state = torch.from_numpy(env.reset())
if opt.use_gpu:
state = state.cuda()
values.append(value)
log_policies.append(log_policy[0, action])
rewards.append(reward)
entropies.append(entropy)
if done:
break
R = torch.zeros((1, 1), dtype=torch.float)
if opt.use_gpu:
R = R.cuda()
if not done:
_, R, _, _ = local_model(state, h_0, c_0)#这个R相当于最后一次的V值,第二个返回值是critic网络的
gae = torch.zeros((1, 1), dtype=torch.float)#额外的处理,为了减小variance
if opt.use_gpu:
gae = gae.cuda()
actor_loss = 0
critic_loss = 0
entropy_loss = 0
next_value = R
for value, log_policy, reward, entropy in list(zip(values, log_policies, rewards, entropies))[::-1]:
gae = gae * opt.gamma * opt.tau
gae = gae + reward + opt.gamma * next_value.detach() - value.detach()#Generalized Advantage Estimator 带权重的折扣项
next_value = value
actor_loss = actor_loss + log_policy * gae
R = R * opt.gamma + reward
critic_loss = critic_loss + (R - value) ** 2 / 2
entropy_loss = entropy_loss + entropy
total_loss = -actor_loss + critic_loss - opt.beta * entropy_loss
writer.add_scalar("Train_{}/Loss".format(index), total_loss, curr_episode)
optimizer.zero_grad()
total_loss.backward()
for local_param, global_param in zip(local_model.parameters(), global_model.parameters()):
if global_param.grad is not None:
break
global_param._grad = local_param.grad
optimizer.step()
if curr_episode == int(opt.num_global_steps / opt.num_local_steps):
print("Training process {} terminated".format(index))
if save:
end_time = timeit.default_timer()
print('The code runs for %.2f s ' % (end_time - start_time))
return
loss值计算
策略损失(Policy): 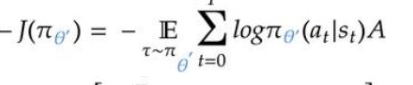
(起决策的网络)
Value网络损失:
(预期与实际的差异)
熵: (熵越大表示各种行为可能性都能有一些,别太绝对)
(熵越大表示各种行为可能性都能有一些,别太绝对)
整体损失函数:

for value, log_policy, reward, entropy in list(zip(values, log_policies, rewards, entropies))[::-1]:
gae = gae * opt.gamma * opt.tau
gae = gae + reward + opt.gamma * next_value.detach() - value.detach()#Generalized Advantage Estimator 带权重的折扣项
next_value = value
actor_loss = actor_loss + log_policy * gae
R = R * opt.gamma + reward
critic_loss = critic_loss + (R - value) ** 2 / 2
entropy_loss = entropy_loss + entropy
total_loss = -actor_loss + critic_loss - opt.beta * entropy_loss
writer.add_scalar("Train_{}/Loss".format(index), total_loss, curr_episode)
optimizer.zero_grad()
total_loss.backward()















 1637
1637











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









