







随着无人机、机器人和自动驾驶技术的快速发展,三维路径规划成为一个备受关注的研究领域。如何在复杂的环境中找到一条高效、平滑并避开障碍物的路径,是许多工程师和科学家面临的挑战。
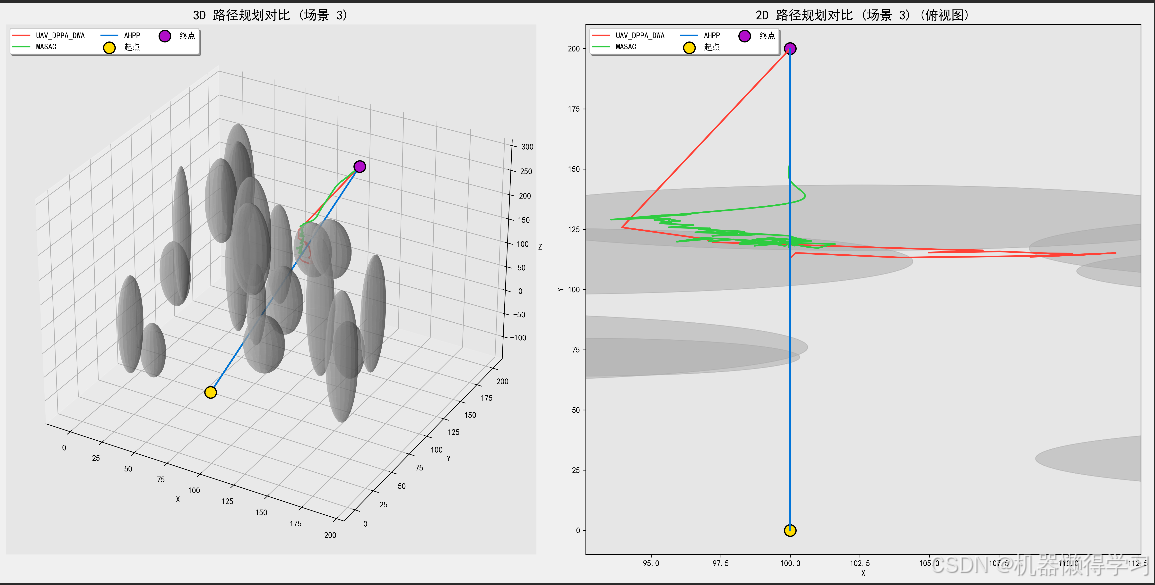
在这篇博客中,我们深入探讨了一种基于 Python 的三维路径规划框架。通过对 UAV_DPPA_DWA、MASAC 和 AHPP 等三种经典路径规划算法的比较,我们展示了不同算法在复杂环境下的表现,并从路径长度、碰撞次数、飞行时间等维度进行了全面的评估。
一、路径规划的背景与意义
三维路径规划的核心目标是找到一条从起点到目标点的最优路径,同时避开环境中的障碍物。算法不仅需要考虑效率,还需兼顾平滑性和安全性。在实际应用中,这些算法广泛应用于:
- 无人机的智能巡航
- 机器人在仓储中的路径优化
- 自动驾驶汽车在复杂城市环境中的决策
二、路径规划算法的实现
本次实验实现了三个核心算法,每个算法各具特色:
1. UAV_DPPA_DWA - 短期动态窗口避障
该算法基于动态窗口法 (Dynamic Window Approach),结合了方向选择与局部避障的策略。它快速评估路径的安全性,并以最小的计算开销生成下一步运动方向。
direction = (goal - current) / np.linalg.norm( 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









