







 LiMapper 无人机影像处理软件2.1版发布,新增多光谱、双相机及大尺度数据源支持,改进匀光匀色算法,提供航飞质量检查、三维点云生成等多种模板,并支持自定义坐标系。
LiMapper 无人机影像处理软件2.1版发布,新增多光谱、双相机及大尺度数据源支持,改进匀光匀色算法,提供航飞质量检查、三维点云生成等多种模板,并支持自定义坐标系。
支持多光谱数据源!LiMapper 无人机影像处理软件2.1发布
随着2018年的到来,LiMapper也迎来了2.1版本。作为一款主打速度与精度的航空影像拼图处理软件,LiMapper 2.1在保持对1.4及2.0版本工程的兼容性的基础上新增了对多光谱数据源、双相机数据源及大尺度数据源的支持。具体新增功能如下:
1. 支持同时打开多个软件实例
(建议只一个实例处理数据,其它用于成果查看)
2. 支持多光谱数据源、双相机数据源及大框幅数据源
3. 新增新建工程向导,支持不同架次的影像和POS的编辑
4. 改进匀光匀色算法,减弱拼接后影像的色差且对曝光不足影像有较好自适应性
5. 新增工程模板,提供航飞质量检查、三维点云生成模板、正摄影像拼图及多光谱影像拼图模板
6. 空中三角测量成果精度提示,可与激光点云配准
7. 支持中英文质量报告的切换,且新增航飞质量检查、测区信息及成果信息的展示内容
8. 完善控制点的显示和保存,新增影像标记点的预测功能
9. 优化软件界面信息展示,如工作区面板新增注册影像数目展示、进度条信息的细化及三维视图信息的优化显示
10.可编辑包围盒来选择局部区域进行处理
11.支持Australis和Photoscan相机标定模型
12.允许用户自定义坐标系
应用案例
Ø 支持多光谱数据源
LiMapper V2.1支持多光谱数据源多个波段同时处理,且支持多个波段拼图结果合并成多波段影像。如下为镇江的RedEdge多光谱影像,影像数目为11000张,用于测绘领域。
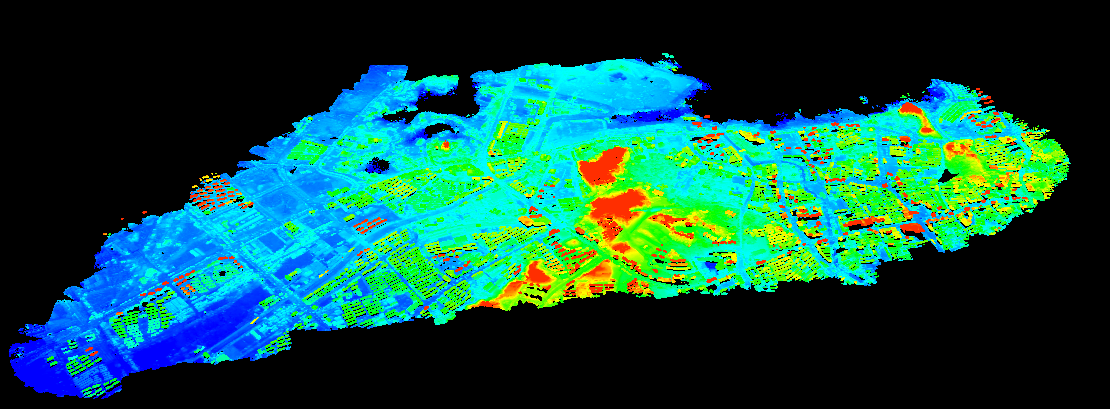
密集点云:依据高程显示


上图为正摄拼图及局部
教程视频:http://www.lidar360.com/archives/4623.html
Ø 支持正射影像数据源
LiMapper V2.1支持不同架次正摄影像及双相机影像处理,广泛应用于地质灾害监测、测绘调查、林业分析及环境应用等领域。
巫山—正射影像—用于灾害监测

密集点云

香港—正摄影像—用于测绘领域

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3313
3313

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









