






5.1 瞰景Smart3D提交空三
导入POS后,在空三任务右键,选择创建空三任务,创建一个新的空三任务,输入空三任务名称。参照相机中选择勾选下视相机作为参照相机。
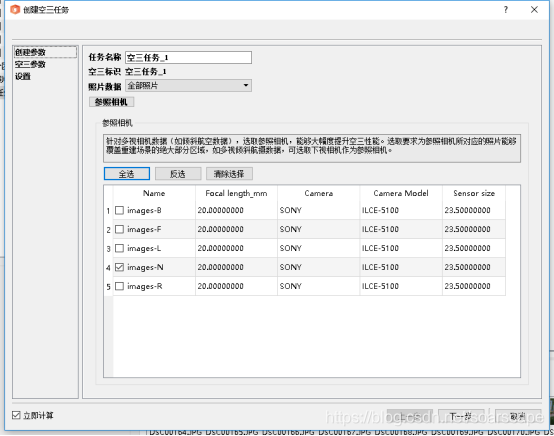
照相机
这是新增的空三算法,不选择的话按一般空三算法计算。选择后,能大幅度提升空三性能,选择时需要指定一个能覆盖所有测区的参照相机,如果是多视倾斜航摄数据,可选择下视相机作为参照相机。
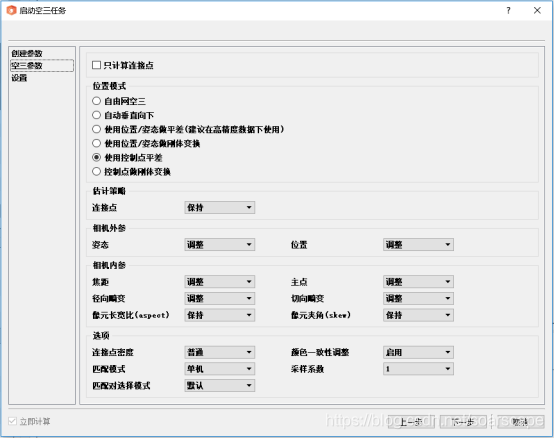
在提交空三运算时,软件默认的设置已足够处理大部分影像数据。在第一遍提交时,建议按默认设置提交即可。以下是相关的空三设置参数。
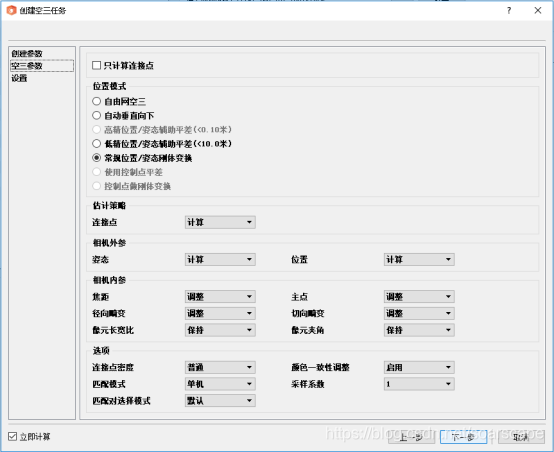
只计算连接点
空三运算时,只有连接点参与解算,做自由网空三运算,控制点不参与平差解算。
位置模式
自由网空三:无定位信息情况下,区块的位置和方向无任何限制
自动垂直向下:区块的垂直朝向由参与运算的影像的综合垂直方向决定。这个选项对于处理航空摄影时定位信息不准时使用。
高精位置/姿态辅助平差(<0.10米):在GNSS/POS定位精度高的情况下使用,使用GNSS/POS参与平差需要保证每张影像都具有精确的位置信息,且误差<0.1米
低精位置/姿态辅助平差(<10.0米):在GNSS/POS定位精度略低的情况下使用,定位误差需满足<10米
常规位置/姿态刚体变换:利用影像GNSS/POS数据对区块定位进行调整,对定位精度无太高要求。
使用控制点平差:控制点参与平差,对区块进行精确定位。
控制点做刚体变换:参考控制点对区块进行刚性配准,不做几何变形的纠正,在控制点不精确时使用(一般不使用)。
相机外参、内参计算方式
o计算:所有参数重新计算;
o调整:以输入的值作为初值进行计算;
o保持:以输入的值参作为精确值,不再进行计算。
连接点密度
调整空三匹配时提取的连接点密度
普通:适用于大部分数据,默认选项。
高:适用于匹配对象纹理较弱或影像较小的数据,增加连接点匹配数量,同时会增加空中三角测量计算的时间。
颜色一致性调整
o启用:软件对所有影像进行自动匀光匀色。
o禁用:软件不对影像进行自动匀光匀色。
匹配模式
单机:适用于只有单台计算机进行空三处理的时候。在启用单机计算时,Feature Match步骤不再拆分为多个步骤,表现为空三处理进度的51%-90%过程为一个完整过程。(即当Feature Match步骤完成时,进度将从51%直接变为90%)。由于步骤无需拆分,运算时间比使用集群设置时有所减少。
集群: 适用于多台计算机并行处理空三任务时。在计算过程中,软件自动将空三步骤拆分为多个子步骤,交由多台计算机同时处理。
采样系数
主要用于单镜头照片快拼的生成。采样系数越高,提取的连接点越少,影像分辨率越低。
匹配对选择模式
o默认:适用于大部分数据,默认选项。
o加强:若影像多为弱纹理、无纹理区域,空三后出现丢片较多的情况,建议选择加强的匹配对选择模式。
选择好空三设置后点击完成。若勾选立即计算,点完成后将直接进行计算,若不勾选,点完成后不会进行计算,需再点击一次提交计算软件才开始计算。
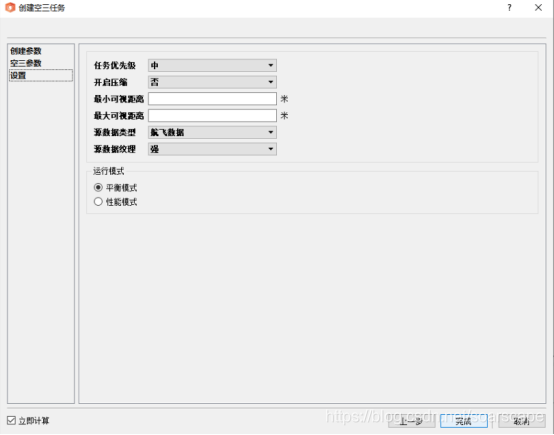
任务优先级
任务优先级分为低、中、高三种级别,级别越高则引擎越优先处理。
最小/最大可视距离
可设置一个粗略估计的视距。
如果不知道确切的视距值,可以设置合理边界(相应减小最小视距增大最大视距)或者忽略不填写。
如果影像位置是已知的,最大/最小视距可以通过忽略空三运行中不恰当的匹配来增强计算效果。
源数据类型
航飞数据:适用于一般航飞影像的空三处理,默认选项。
普通数据:适用于一般普通拍摄所得照片进行空三处理。
竖直环绕数据:适用于对象环绕拍摄影像的空三处理。相比同一数据的航飞处理模式精度更高。
纹理近似小场景数据:适用于纹理相近、小场景获取的数据,空三处理时间更长。
运行模式
平衡模式:适用于一般航飞影像的空三处理,默认选项,64GB电脑可处理1.5-2万张影像,128GB电脑可处理4万-6万张影像。
性能模式:适用于大数据进行空三处理。64GB电脑可处理4万-5万张影像,128GB电脑可处理10万张影像。
提交运算后,需打开软件的Engine模块开始运算,注意Engine模块的任务队列路径与创建工程时所选择路径保持一致,任务队列路径可在引擎管理中修改,右键提交修改即可。空三计算时,可在属性栏查看空三进度条。
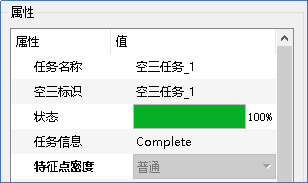
属性
属性栏中可查看空三参数和空三处理进度及运算状态,可调整连接点大小,在三维界面中更清楚的显示点云匹配情况。
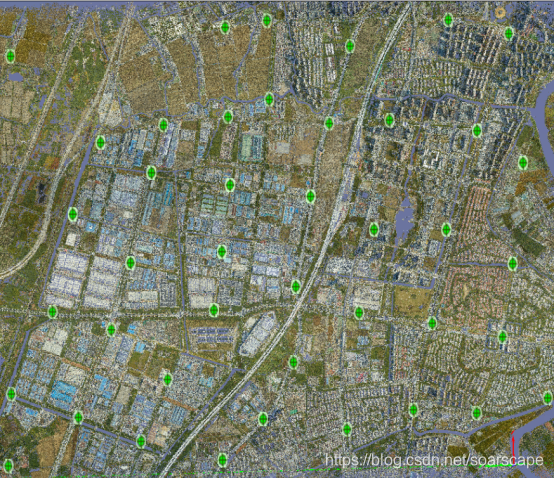
空三计算完成后,可在三维视图下查看空三运算成果,检查有无异常。
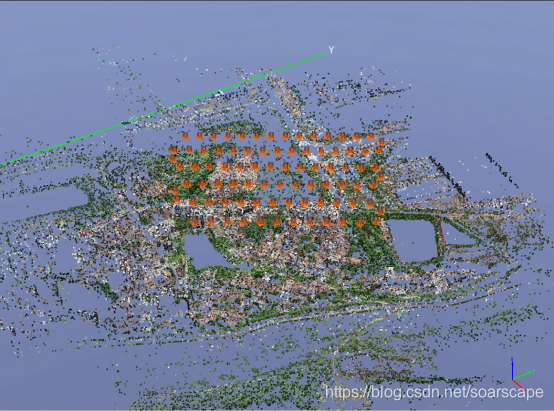
匹配成功的POS点显示为橙色,匹配失败的POS点显示为黄色。
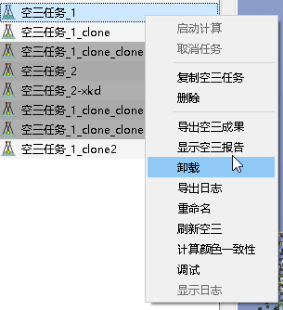
每一个空三任务可进行以下操作:
启动计算:开始进行空三运算。提交后弹出空三运算对话框,可更改设置。
取消任务:取消空三运算任务。
复制空三任务:复制一个空三任务,如果不想在原来的空三基础上做可更改,可以复制一个新的空三任务。
删除:针对不需要的空三任务,可以删除。
导出空三成果:空三完成后可以导出.xml格式的空三成果。
显示空三报告:查看空三精度报告。
卸载/加载:卸载空三任务后可减少工程所占内存,缩短数据加载时间,但不删除空三任务数据。卸载后该任务不可操作,可通过加载进行恢复。
导出日志:导出记录空三处理过程的日志文件。在一般方法无法判断空三失败原因时,用户可导出日志,提交给技术人员进行错误分析。
重命名:对当前空三名称重命名,不会影响工程计算。
计算颜色一致性:多个空三任务进行合并建模时,块与块之间存在色差。使用该功能可减少不同区块之间产生的色差。
显示日志:空三失败时,可显示空三处理过程,用于快速定位空三失败原因,分析错误。
5.2 瞰景Smart3D显示空三报告
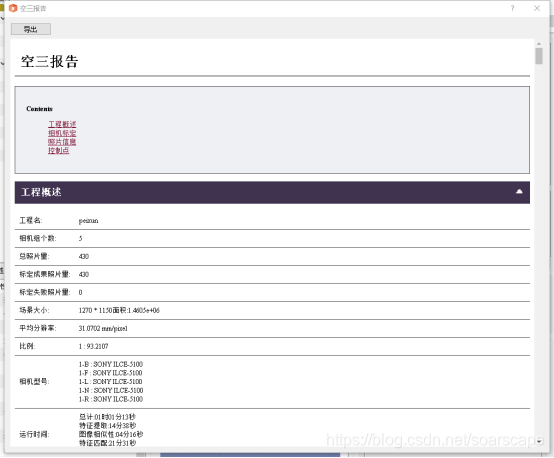
空三报告包括以下内容:
工程概述
工程相关信息。包括工程名、相机组个数、照片量、平均分辨率、相机型号、场景大小及空三运行时间。
质量简报
查看标定数据量及同名连接点数量。查看数据反投影误差的中误差,中误差需小于1像素。
有人机数据反投影误差中误差<0.6像素。
无人机数据反投影误差中误差<1像素。
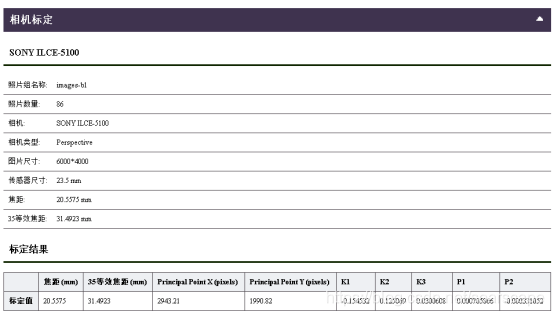
相机标定
查看相机型号及软件标定结果。
相片信息
查看单张影像相关信息,如相片组、相机,每张影像连接点个数、中误差。
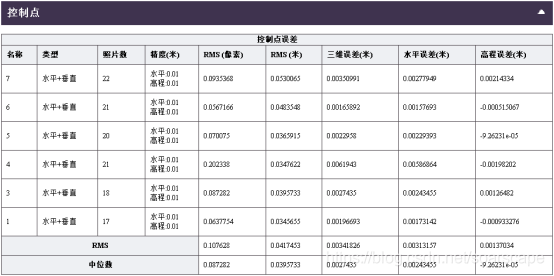
控制点
控制点列表中可查看控制点或检查点残差及中误差,控制点RMS一般小于1个像素,检查点小于2-3个像素即可。
5.3 瞰景Smart3D导入自定义坐标系
瞰景Smart3D 支持导入自定义坐标文件,导入方式如下。
找到世界坐标系下→more→Spatial reference system database,在坐标系统库中,可以看到软件内置的所有坐标系统,所有的坐标系统都是prj文件。用户可以根据已有的坐标信息,更改坐标系统的prj文件。更改坐标文件参考7.7坐标文件修改。
更改完成后,可从Spatial reference system database中导入使用。

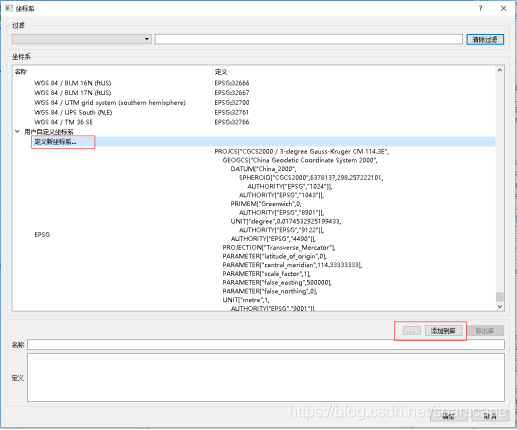
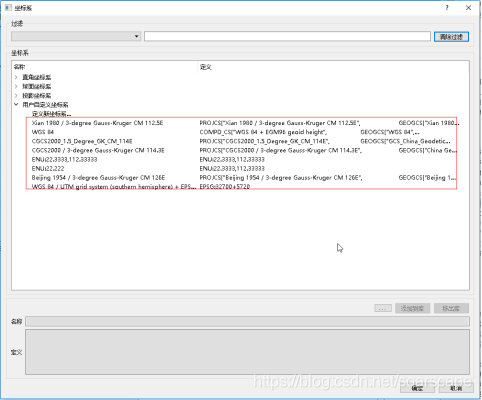
找到最下方的用户自定义坐标系定义新坐标系,点击浏览坐标系统文件,选择需要的坐标系统文件导入。点击添加到库,添加到User defined system中,即可使用。不需要该坐标系统时,选中该坐标系统,点击移出库即可。
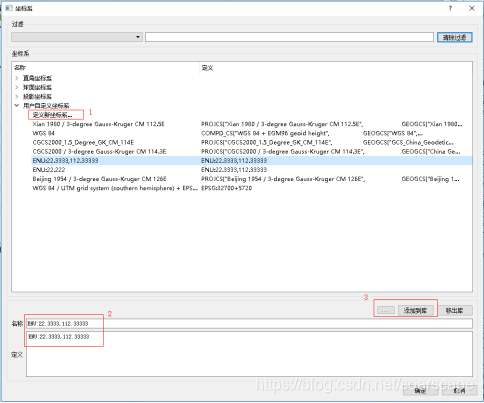
自定义ENU坐标系
点击定义新坐标系,在下方名称及定义两栏中,按照ENU:纬度,经度的格式编辑,如图所示。编辑完成后,点击添加到库,将坐标系添加至坐标文件库中。
5.4 瞰景Smart3D添加控制点
添加控制点方法有三种,一是导入控制点文本文件,二是手动输入控制点坐标,三是导入xml的控制点文件。
导入控制点文件
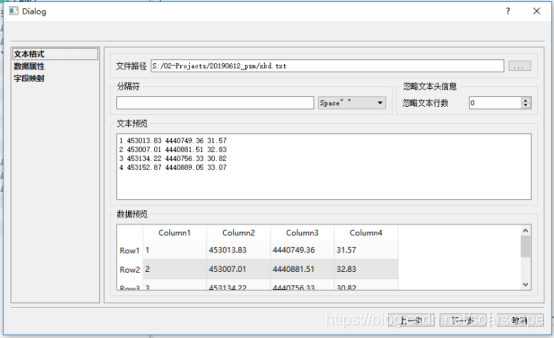
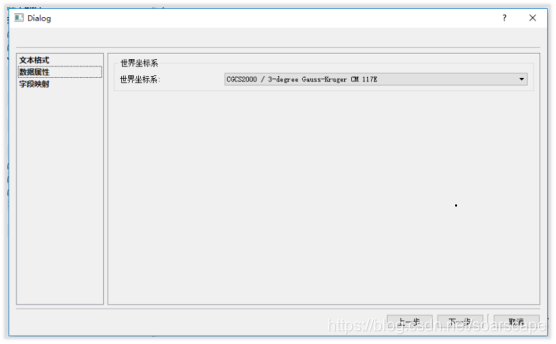
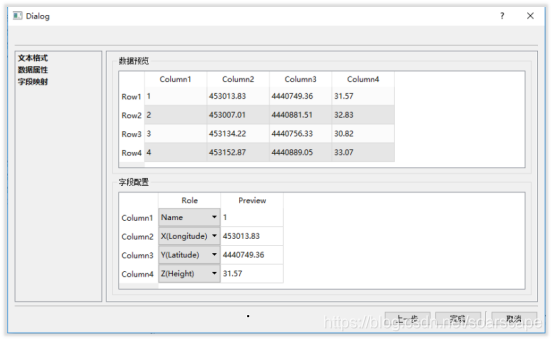
在控制点信息上右击,选择导入控制点,选择控制点文件打开。控制点导入操作和导入POS一样,选择正确的坐标系统,给控制点分配字段,完成点击完成。
添加控制点
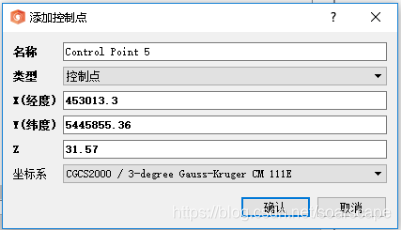
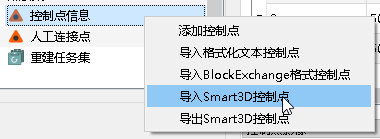
添加单个点。在控制点信息上右键,选择添加控制点,
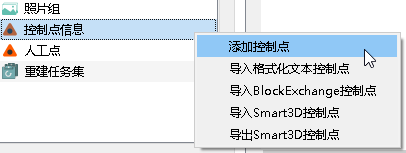
编辑控制点名称,手动输入控制点坐标并定义好控制点坐标系,完成后点确认,完成控制点添加。
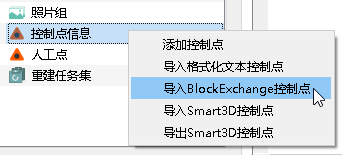
导入BlockExchange控制点
可导入由ContextCapture软件中导出的xml格式的控制点文件,文件中记录控制点与影像之间的对应关系,导入后无需再刺点。
导入后可在控制点列表中进行查看,列表中展示了所有控制点的误差情况。
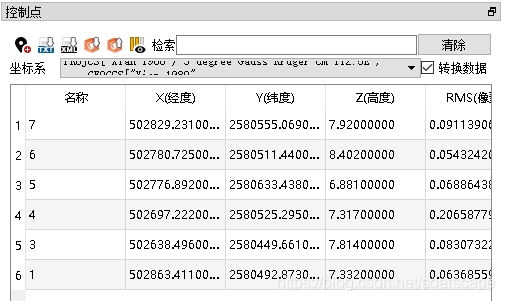

控制点导入后,以列表形式显示。
添加:进入添加控制点界面,手动输入控制地坐标。
导入格式化文本控制点:导入txt或csv格式的控制点文件。
导入BlockExchange控制点:
导出Smart3D控制点:导出瞰景Smart3D控制点格式的文件。
导入Smart3D控制点:导入瞰景Smart3D控制点格式的文件。
隐藏列:隐藏控制点坐标列,直接显示控制点各项误差值。
检索:支持对控制点点名进行检索,提高刺点效率。
转换数据:在更改坐标系时选择是否根据坐标系转换坐标值,不勾选则不转换坐标,仅对控制点进行改变坐标系操作。
同时可在三维界面查看。
单击控制点,在照片界面找到匹配,在这里可以看到软件预测出的控制点所在相片。点击一张照片开始刺点。

在刺点界面中,鼠标滚轮进行放大缩小,鼠标左键可以拖动影像,右键刺点,图上显示为,黄色光标表示该点未记录。此时需点击界面下方添加进行使用,添加后控制点显示为,同时右侧信息栏中出现已完成刺点的影像名称。
刺点时,照片用不同颜色进行标识,红色表示预测点位在照片边缘,绿色表示预测点位在照片中央,黄色则表示介于两者之间。
按住Shift点击左键也可达到同样效果。刺点时软件显示绿色核线作透明化处理,快捷键“V”可隐藏。
按照同样的方法对其他照片进行刺点,每个镜头至少三张。

需要使用检查点检查空三精度时,将控制点列表滚动到最后,列表最后一列可勾选检查点。勾选的检查点不参与平差,在空三报告中显示检查点误差报告。
所有控制点刺完后,复制一个空三任务,提交空三计算,进行控制点平差计算。
此时,使用控制点平差和控制点做刚体变换选项处于可选状态。软件建议采用默认参数提交控制点平差计算。
使用控制点平差:控制点参与平差,对区块进行精确地理配准。
控制点做刚体变换:控制点仅用于刚性配准,忽略长距离几何纠正(精度较低)。
平差解算完成后,需要检查空三质量。打开质量报告进行查看。
5.5 瞰景Smart3D导出空三成果
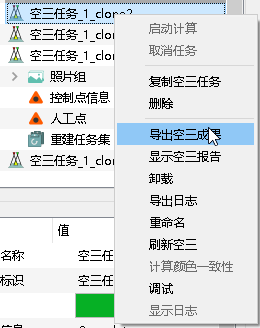
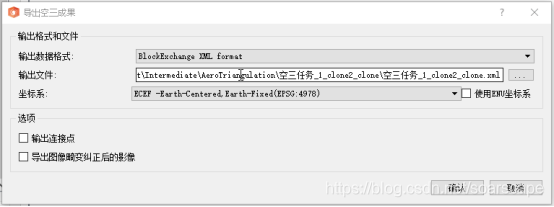
空三任务右键,选择导出空三成果。
导出的空三成果支持两种格式.at格式和.xml格式。其中,.xml格式为第三方软件通用的空三成果格式,.at格式为瞰景Smart3D特有的空三格式,用于软件内部空三成果的流转,文件大小及导入导出速度均优于.xml格式的空三成果。
选择输出数据格式,Smart3D binary format为瞰景Smart3D特有的空三成果格式,导出时默认输出连接点,导出速度较快。
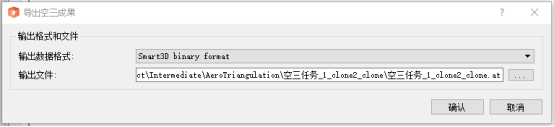
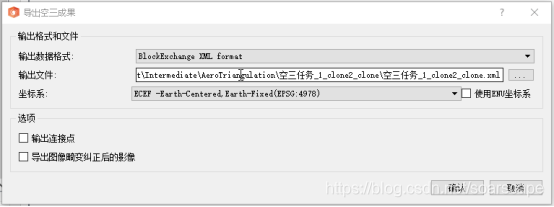
选择输出格式为BlockExchane XML format时,根据需要选择是否需要输出连接点及畸变纠正后影像。点击确认后即可导出通用.xml格式的空三文件。
5.6 瞰景Smart3D导入空三成果
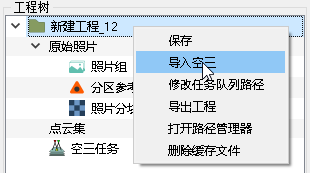
导入空三成果需在空白工程中进行,已有数据的工程中无法导入。因此要导入空三成果,需先创建一个新的空三工程。
在新工程的工程名处右键,选择导入空三。
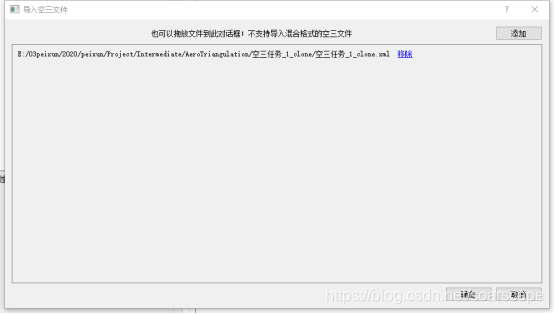
将需要导入的空三成果文件拖放至对话框中。若有多个空三成果需要合并,将所有的空三成果都加入该对话框,导入后,软件将自动合并多个空三任务。
5.7 瞰景Smart3D多个工程控制点合并
遇到大数据量的空三工程需要刺点时,可以考虑分为不同工程,由不同作业人员分工刺点后,统一汇总至原始空三工程中进行平差,步骤如下:
1、需保证影像存放于共享盘中,确保其他作业人员可访问。
2、空三任务右键,导出xml格式的空三成果文件,如图所示。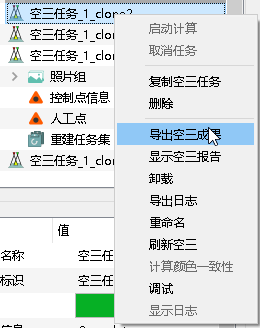
选择输出格式为BlockExchane XML format时,根据需要选择不输出连接点及畸变纠正后影像。点击确认后即可导出通用.xml格式的空三文件。
3、获得空三文件后,由每个作业员新建工程,参考导入空三,导入之前获得的空三文件。空三文件导入完成后,参考刺加控制点,完成作业人员各自的控制点刺加任务。
4、控制点刺加完成后需汇总,需要作业人员导出刺加完成的控制点文件。在控制点信息右键,选择导出Smart3D控制点,保存。
5、在需要汇总的空三工程的控制点信息上右键,选择导入Smart3D控制点,将其他人刺好点的文件导入,完成刺点情况的汇总。















 5810
5810











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











