







一.概述
开环控制: 没有反馈
闭环控制:有反馈调节的控制
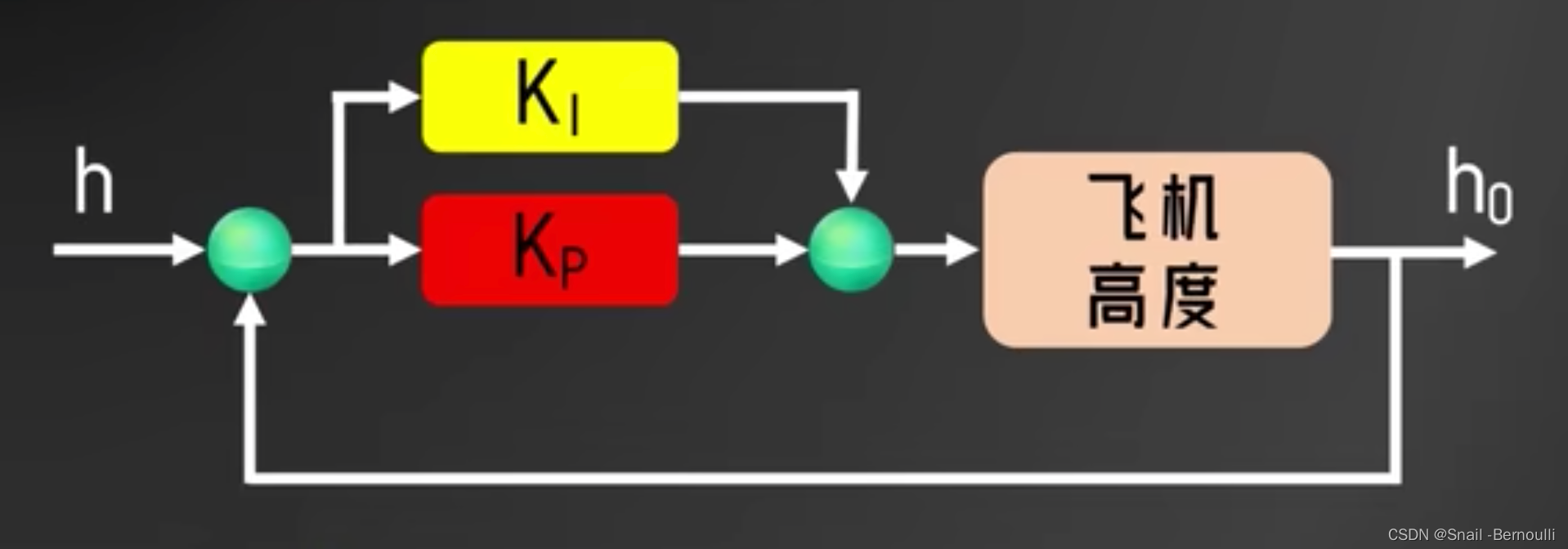
PID控制环节由比例,积分,微分 调节 三个环节构成,三个环节在控制过程中相互配合,共同对输入输出间的误差进行调控,最终满足控制要求 ,如下图所示
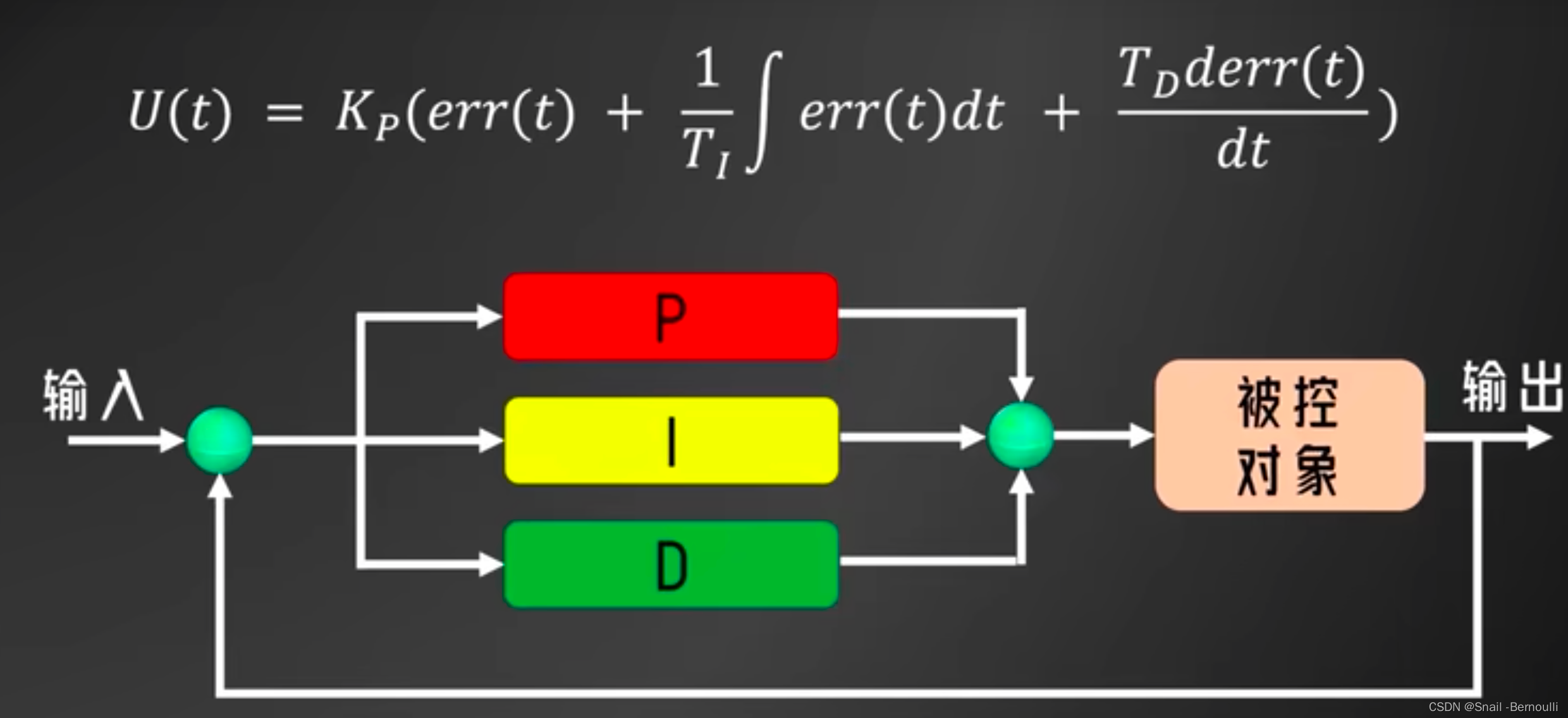
Pid控制完整图示
二、各部分说明
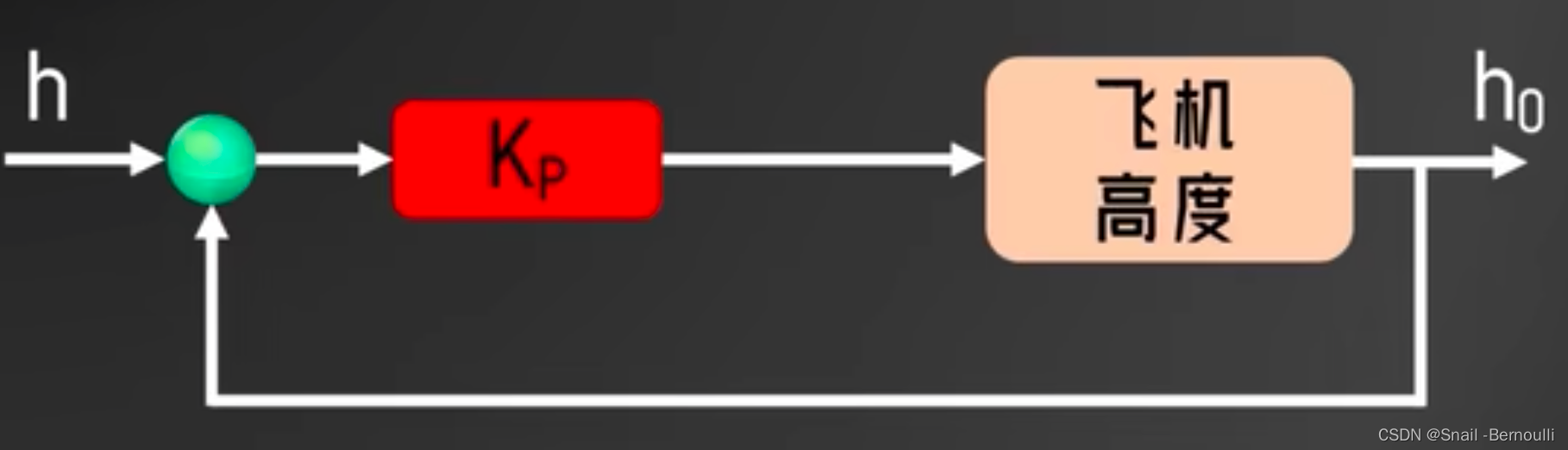
1. Proportion(比例控制)
比例控制就是好每次调节的高度是误差的Kp倍.
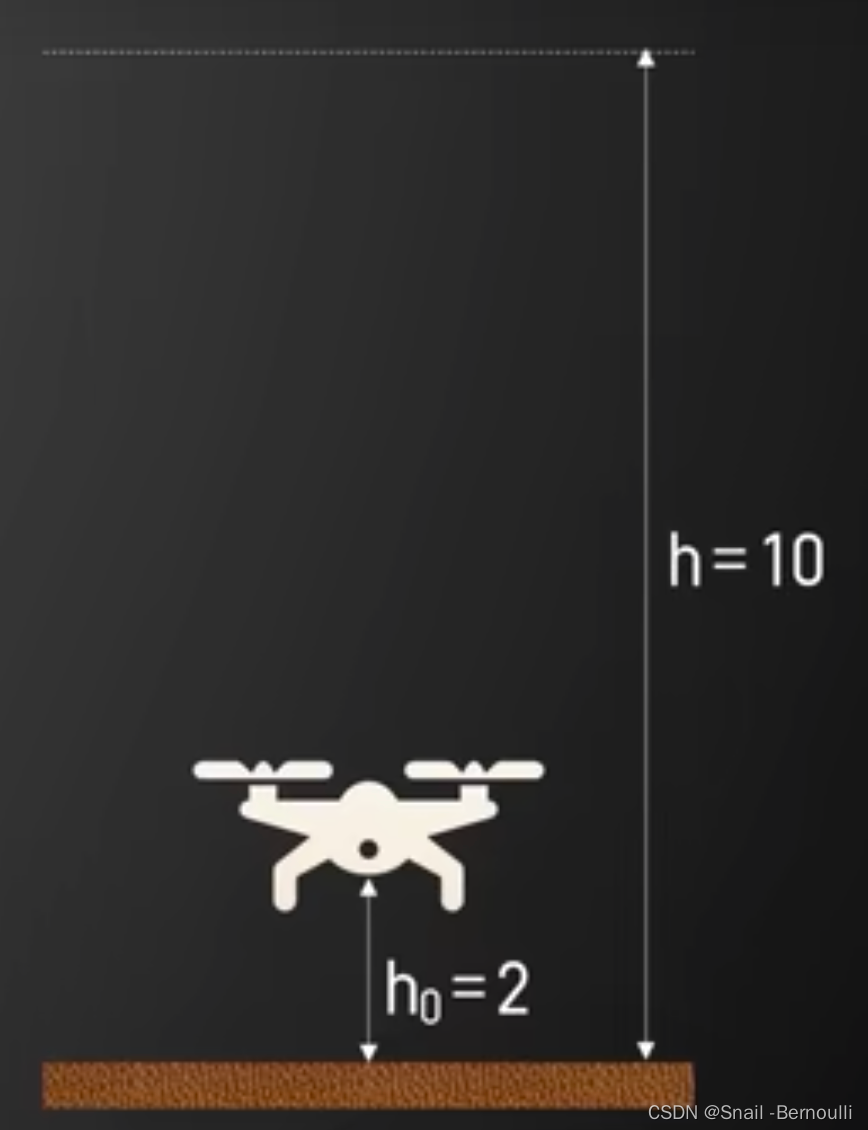
说明::err是误差,h是期望高度,hn是反馈高度(当前高度,观测到的).假设Kp=0.5
用无人机的高度控制来说明,让无人机期望悬停在10m的高度,而此时无人机的高度为2m
第一次误差:err = h - h0 = 8m
第二次调节: Kp * err = 4
第一次调节高度为4m,此时无人机上升到h1 = 6m
第二次误差:err = h - h1 = 4m
第二次调节: Kp * err = 2
第一次调节高度为4m,此时无人机上升到h2 = 8m
依次进行下去,随着随着误差的减小,每次上升的量也逐渐减小,但最终会接近10s的目标高度.整个过程就是比例控制.
1.1 效果
比例系数Kp越大, 系统反应越快,可以更快的接近期望目标
1.2 弱点
存在干扰时候可能永远到达不了目标.如无人机上升过程中存在风力或其他干扰因素使得无人机每次下讲1m,而此时若无人机在8m的高度,比例控制调节的1m(Kp * err = 0.5 * (10 - 2) )会被干扰因素抵消掉,无人机会在8m的高度保持一个被其他因素抵消掉而导致的平衡状态,导致其永远到达不了期望值(例子中的10m高度). 这就是静态误差,也叫稳态误差. 而Kp的调节避免不了稳态误差.
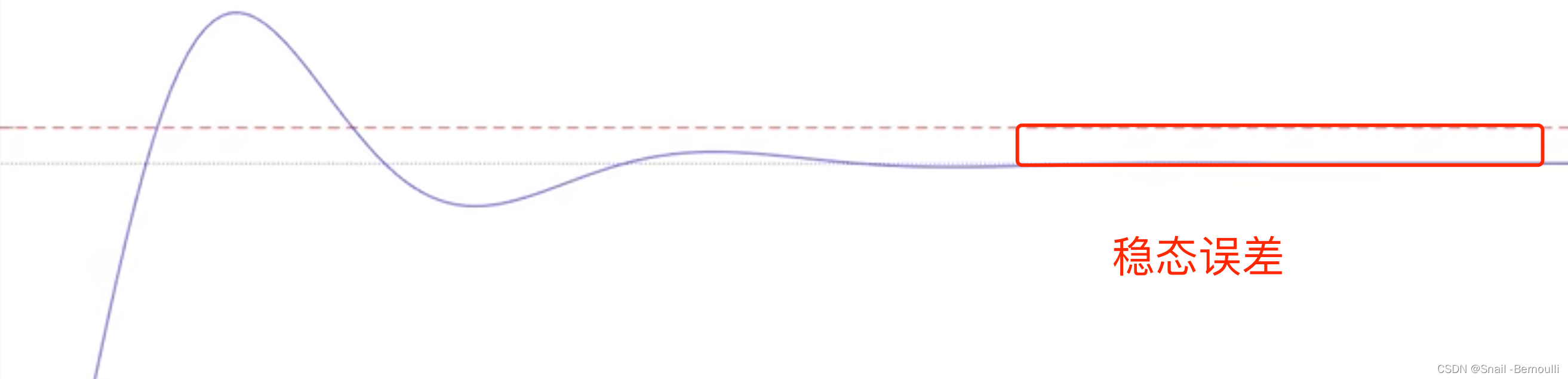
为了消除稳态误差,引入积分控制.
2. Integration(积分控制)
积分控制是对过去所有的误差求和
Kp * err + Ki * ∫ err
无人机经过两次控制,第一次误差是8 ,第二次误差是4,第二次后它的累积误差就是8 + 4 = 12m, 取Ki = 0.1
此时即时向下吹的风和比例控制上升的效果抵消.积分控制还是可以让无人机上升1.2m,这样还是可以逐渐到达目标高度.
2.1 效能
对于阶跃效应,加入合适的积分控制系数后,被控量可以快速精准的到达期望值.
2.2 不足
曲线不完美,超调量太大
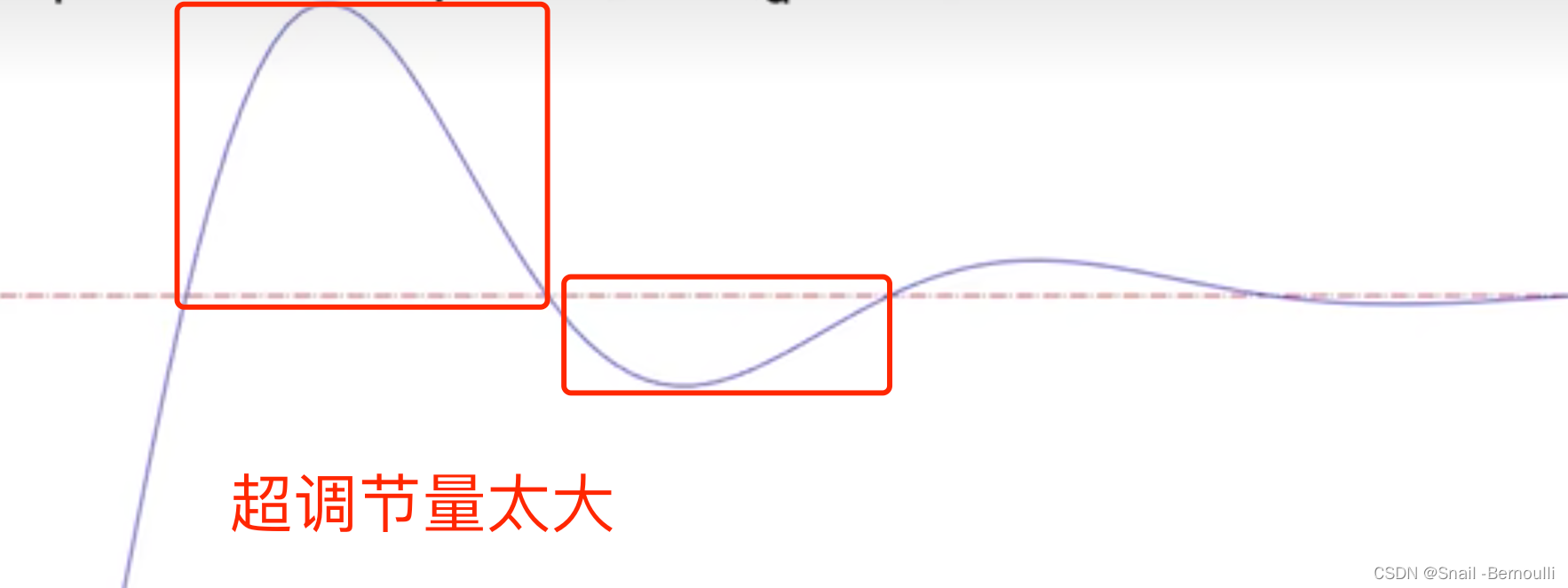
·如果这个超调是自动驾驶方向盘的调节,如此大的过冲容易让乘客惊心动魄.需要微分控制出场了
3.Differential(微分控制)
微分控制是通过当前时刻与上一时刻误差量的差值,对未来做预测.
Kp * err + Ki * ∫ err + Kd * Δerr
如果差值为正,认为误差逐渐变大,需要加大控制强度,使得误差降下来;反正让控制强度小一些,使目标平稳缓和的到达期望值.
噪声可能引起发散导致 震荡
尤其噪声大的时候,而且一般d参数会比较小
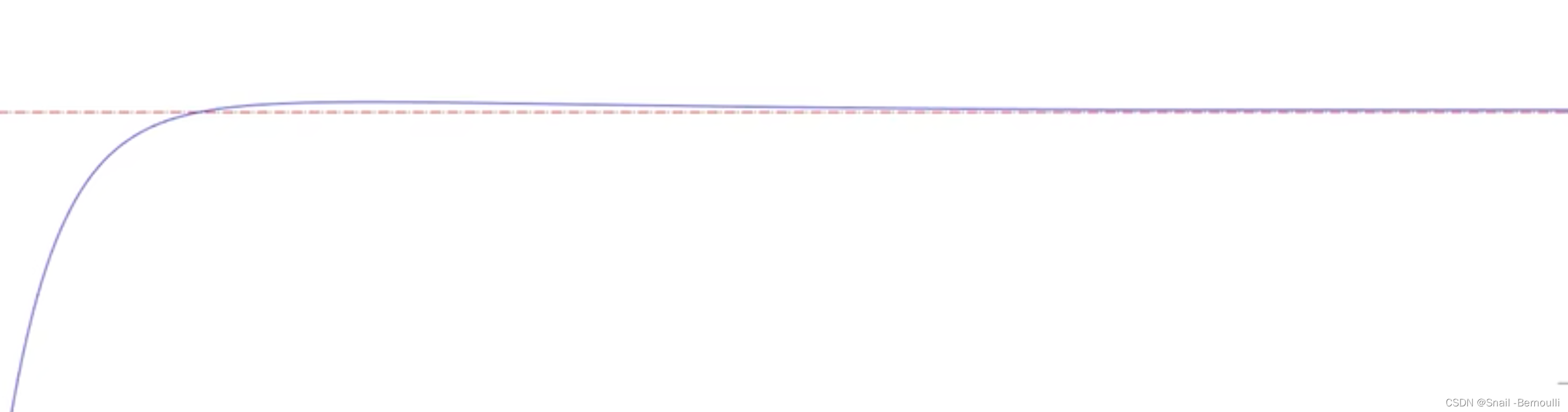
加入后系统超调量得到有效控制,最终得到期望控制曲线.

















 3598
3598

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









