







参考笔记
https://github.com/PariseC/Algorithms_for_solving_VRP
1. 适用场景
- 求解MDCVRP 问题
- 车辆类型单一
- 车辆容量不小于需求节点最大需求
- 多车辆基地
- 各车场车辆总数满足实际需求
1. 适用场景
- 求解MDCVRP 问题
- 车辆类型单一
- 车辆容量不小于需求节点最大需求
- 多车辆基地
- 各车场车辆总数满足实际需求
2. 代码分析
车俩路径规划问题按照车场数量可分为单一车场路径规划问题和多车场路径规划问题。针对单一车场条件下仅考虑车辆容量限制的路径规划问题前边帖子中已实现 ACO算法求解,本文采用ACO算法对多车场条件下仅考虑车辆容量限制的路径规划问题进行求解。为了保持代码的延续性以及求解思路的一致性,这里对上述ACO算法代码进行如下主要修正实现MDCVRP问题的求解。
- Model数据结构类中采用demand_dict属性存储需求节点集合,depot_dict属性储存车场节点集合,demand_id_list属性储存需求节点id集合,distance_matrix属性储存任意节点间的欧式距离;
- Node数据结构类中去掉node_seq属性,增加depot_capacity属性记录车场的车队限制
- splitRoutes函数中分割车辆路径时分配最近车场作为其车辆提供基地(满足车场车队数量限制)
3. 数据格式
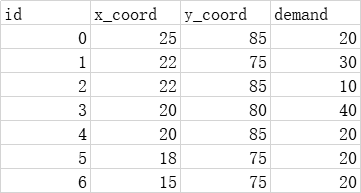
以csv文件储存数据,其中demand.csv文件记录需求节点数据,共包含需求节点id,需求节点横坐标,需求节点纵坐标,需求量;
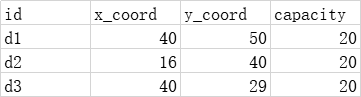
depot.csv文件记录车场节点数据,共包含车场id,车场横坐标,车场纵坐标,车队数量。需要注意的是:需求节点id应为整数,车场节点id任意,但不可与需求节点id不可重复。
4. 分步实现
(1)数据结构
为便于数据处理,定义Sol()类,Node()类,Model()类,其属性如下表:
- Sol()类,表示一个可行解
| 属性 | 描述 |
|---|---|
| nodes_seq | 需求节点seq_no有序排列集合,对应TSP的解 |
| obj | 优化目标值 |
| routes | 车辆路径集合,对应CVRP的解 |
- Node()类,表示一个网络节点
| 属性 | 描述 |
|---|---|
| id | 物理节点id,可选 |
| x_coord | 物理节点x坐标 |
| y_coord | 物理节点y坐标 |
| demand | 物理节点需求 |
| depot_capacity | 车辆基地车队规模 |
- Model()类,存储算法参数
| 属性 | 描述 |
|---|---|
| best_sol | 全局最优解,值类型为Sol() |
| demand_dict | 需求节点集合(字典),值类型为Node() |
| depot_dict | 车场节点集合(字典),值类型为Node() |
| sol_list | 可行解集合,值类型为Sol() |
| opt_type | 优化目标类型,0:最小车辆数,1:最小行驶距离 |
| vehicle_cap | 车辆容量 |
| distance_matrix | 网络弧距离 |
| popsize | 蚁群规模 |
| alpha | 信息启发式因子 |
| beta | 期望启发式因子 |
| Q | 信息素总量 |
| rho | 信息素挥发系数 |
| tau | 网络弧信息素 |
| tau0 | 路径初始信息素 |
(2)文件读取
def readCsvFile(demand_file,depot_file,model):
with open(demand_file,'r') as f:
demand_reader=csv.DictReader(f)
for row in demand_reader:
node = Node()
node.id = int(row['id'])
node.x_coord = float(row['x_coord'])
node.y_coord = float(row['y_coord'])
node.demand = float(row['demand'])
model.demand_dict[node.id] = node
model.demand_id_list.append(node.id)
with open(depot_file,'r') as f:
depot_reader=csv.DictReader(f)
for row in depot_reader:
node = Node()
node.id = row['id']
node.x_coord=float(row['x_coord'])
node.y_coord=float(row['y_coord'])
node.depot_capacity=float(row['capacity'])
model.depot_dict[node.id] = node
(3)计算距离矩阵、初始化路径信息素
def initDistanceTau(model):
for i in range(len(model.demand_id_list)):
from_node_id = model.demand_id_list[i]
for j in range(i+1,len(model.demand_id_list)):
to_node_id=model.demand_id_list[j]
dist=math.sqrt( (model.demand_dict[from_node_id].x_coord-model.demand_dict[to_node_id].x_coord)**2
+(model.demand_dict[from_node_id].y_coord-model.demand_dict[to_node_id].y_coord)**2)
model.distance_matrix[from_node_id,to_node_id]=dist
model.distance_matrix[to_node_id,from_node_id]=dist
model.tau[from_node_id,to_node_id]=model.tau0
model.tau[to_node_id,from_node_id]=model.tau0
for _,depot in model.depot_dict.items():
dist = math.sqrt((model.demand_dict[from_node_id].x_coord - depot.x_coord) ** 2
+ (model.demand_dict[from_node_id].y_coord -depot.y_coord)**2)
model.distance_matrix[from_node_id, depot.id] = dist
model.distance_matrix[depot.id, from_node_id] = dist
(4)目标值计算
适应度计算依赖" splitRoutes “函数对TSP可行解分割得到车辆行驶路线和所需车辆数,在得到各车辆行驶路线后调用” selectDepot “函数,在满足车场车队规模条件下分配最近车场,” calDistance "函数计算行驶距离。
def selectDepot(route,depot_dict,model):
min_in_out_distance=float('inf')
index=None
for _,depot in depot_dict.items():
if depot.depot_capacity>0:
in_out_distance=model.distance_matrix[depot.id,route[0]]+model.distance_matrix[route[-1],depot.id]
if in_out_distance<min_in_out_distance:
index=depot.id
min_in_out_distance=in_out_distance
if index is None:
print("there is no vehicle to dispatch")
route.insert(0,index)
route.append(index)
depot_dict[index].depot_capacity=depot_dict[index].depot_capacity-1
return route,depot_dict
def splitRoutes(node_id_list,model):
num_vehicle = 0
vehicle_routes = []
route = []
remained_cap = model.vehicle_cap
depot_dict=copy.deepcopy(model.depot_dict)
for node_id in node_id_list:
if remained_cap - model.demand_dict[node_id].demand >= 0:
route.append(node_id)
remained_cap = remained_cap - model.demand_dict[node_id].demand
else:
route,depot_dict=selectDepot(route,depot_dict,model)
vehicle_routes.append(route)
route = [node_id]
num_vehicle = num_vehicle + 1
remained_cap =model.vehicle_cap - model.demand_dict[node_id].demand
route, depot_dict = selectDepot(route, depot_dict, model)
vehicle_routes.append(route)
return num_vehicle,vehicle_routes
def calRouteDistance(route,model):
distance=0
for i in range(len(route)-1):
from_node=route[i]
to_node=route[i+1]
distance +=model.distance_matrix[from_node,to_node]
return distance
def calObj(node_id_list,model):
num_vehicle, vehicle_routes = splitRoutes(node_id_list, model)
if model.opt_type==0:
return num_vehicle,vehicle_routes
else:
distance = 0
for route in vehicle_routes:
distance += calRouteDistance(route, model)
return distance,vehicle_routes
(5)位置更新
在更新蚂蚁位置时,调用 " searchNextNode "函数,依据网络弧信息素浓度及启发式信息搜索蚂蚁下一个可能访问的节点。
def movePosition(model):
sol_list=[]
local_sol=Sol()
local_sol.obj=float('inf')
for k in range(model.popsize):
#随机初始化蚂蚁为止
nodes_id=[int(random.randint(0,len(model.demand_id_list)-1))]
all_nodes_id=copy.deepcopy(model.demand_id_list)
all_nodes_id.remove(nodes_id[-1])
#确定下一个访问节点
while len(all_nodes_id)>0:
next_node_no=searchNextNode(model,nodes_id[-1],all_nodes_id)
nodes_id.append(next_node_no)
all_nodes_id.remove(next_node_no)
sol=Sol()
sol.node_id_list=nodes_id
sol.obj,sol.routes=calObj(nodes_id,model)
sol_list.append(sol)
if sol.obj<local_sol.obj:
local_sol=copy.deepcopy(sol)
model.sol_list=copy.deepcopy(sol_list)
if local_sol.obj<model.best_sol.obj:
model.best_sol=copy.deepcopy(local_sol)
def searchNextNode(model,current_node_id,SE_List):
prob=np.zeros(len(SE_List))
for i,node_id in enumerate(SE_List):
eta=1/model.distance_matrix[current_node_id,node_id]
tau=model.tau[current_node_id,node_id]
prob[i]=((eta**model.alpha)*(tau**model.beta))
#采用轮盘法选择下一个访问节点
cumsumprob=(prob/sum(prob)).cumsum()
cumsumprob -= np.random.rand()
next_node_id= SE_List[list(cumsumprob > 0).index(True)]
return next_node_id
(6)信息素更新
这里采用蚁周模型对网络弧信息素进行更新,在具体更新时可根据可行解的node_id_list属性(TSP问题的解)对所经过的网络弧信息素进行更新。
def upateTau(model):
rho=model.rho
for k in model.tau.keys():
model.tau[k]=(1-rho)*model.tau[k]
#根据解的node_id_list属性更新路径信息素(TSP问题的解)
for sol in model.sol_list:
nodes_id=sol.node_id_list
for i in range(len(nodes_id)-1):
from_node_id=nodes_id[i]
to_node_id=nodes_id[i+1]
model.tau[from_node_id,to_node_id]+=model.Q/sol.obj
(7)绘制收敛曲线
def plotObj(obj_list):
plt.rcParams['font.sans-serif'] = ['SimHei'] #show chinese
plt.rcParams['axes.unicode_minus'] = False # Show minus sign
plt.plot(np.arange(1,len(obj_list)+1),obj_list)
plt.xlabel('Iterations')
plt.ylabel('Obj Value')
plt.grid()
plt.xlim(1,len(obj_list)+1)
plt.show()
(8)绘制车辆路线
def outPut(model):
work=xlsxwriter.Workbook('result.xlsx')
worksheet=work.add_worksheet()
worksheet.write(0,0,'opt_type')
worksheet.write(1,0,'obj')
if model.opt_type==0:
worksheet.write(0,1,'number of vehicles')
else:
worksheet.write(0, 1, 'drive distance of vehicles')
worksheet.write(1,1,model.best_sol.obj)
for row,route in enumerate(model.best_sol.routes):
worksheet.write(row+2,0,'v'+str(row+1))
r=[str(i)for i in route]
worksheet.write(row+2,1, '-'.join(r))
work.close()
(9)输出结果
def plotRoutes(model):
for route in model.best_sol.routes:
x_coord=[model.depot_dict[route[0]].x_coord]
y_coord=[model.depot_dict[route[0]].y_coord]
for node_id in route[1:-1]:
x_coord.append(model.demand_dict[node_id].x_coord)
y_coord.append(model.demand_dict[node_id].y_coord)
x_coord.append(model.depot_dict[route[-1]].x_coord)
y_coord.append(model.depot_dict[route[-1]].y_coord)
plt.grid()
if route[0]=='d1':
plt.plot(x_coord,y_coord,marker='o',color='black',linewidth=0.5,markersize=5)
elif route[0]=='d2':
plt.plot(x_coord,y_coord,marker='o',color='orange',linewidth=0.5,markersize=5)
else:
plt.plot(x_coord,y_coord,marker='o',color='b',linewidth=0.5,markersize=5)
plt.xlabel('x_coord')
plt.ylabel('y_coord')
plt.show()
(10)主函数
def run(demand_file,depot_file,Q,tau0,alpha,beta,rho,epochs,v_cap,opt_type,popsize):
"""
:param demand_file: demand file path
:param depot_file: depot file path
:param Q:信息素总量
:param tau0: 路径信息素初始值
:param alpha:信息启发式因子
:param beta:期望启发式因子
:param rho:信息挥发因子
:param epochs:迭代次数
:param v_cap:车辆容量
:param opt_type:优化类型:0:最小化车辆数,1:最小化行驶距离
:param popsize:蚁群规模
:return:
"""
model=Model()
model.vehicle_cap=v_cap
model.opt_type=opt_type
model.alpha=alpha
model.beta=beta
model.Q=Q
model.tau0=tau0
model.rho=rho
model.popsize=popsize
sol=Sol()
sol.obj=float('inf')
model.best_sol=sol
history_best_obj = []
readCsvFile(demand_file,depot_file,model)
initDistanceTau(model)
for ep in range(epochs):
movePosition(model)
upateTau(model)
history_best_obj.append(model.best_sol.obj)
print("%s/%s, best obj: %s" % (ep,epochs, model.best_sol.obj))
plotObj(history_best_obj)
plotRoutes(model)
outPut(model)















 5334
5334











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









