







转子动力学,钟一鄂
我水平太差,不太好理解这本书,/(ㄒoㄒ)/~~
第一章 http://book.ucdrs.superlib.net/views/specific/2929/bookDetail.jsp?dxNumber=000001034999&d=CE35F309CB85878C55BA563D0038FEED&fenlei=1811050303
第一章 单圆盘转子的临界转速和不平衡响应
刚性支承:轴承与轴承座完全刚性
简单旋转机械可简化为:无质量的弹性转轴上装有圆盘,两端刚性支撑
1.1 转子的涡动
为了避开静变形,将单圆盘转子竖直放置,圆盘位于中间,作转速
Ω
\Omega
Ω的匀速运动。此时给转轴加一横向冲击,研究这种运动的性质。
定义坐标系:固定坐标系
x
y
s
xys
xys,轴向为
s
s
s,其余两个方向为
x
x
x与
y
y
y。圆盘圆心为
o
′
o'
o′,静止时圆心所在位置为
o
o
o,
o
′
o'
o′的坐标为
(
x
,
y
)
(x,y)
(x,y)。

圆盘此时只受转轴给的弹性恢复力
F
=
−
k
r
,
r
=
o
o
′
ˉ
F=-kr, r=\bar{oo'}
F=−kr,r=oo′ˉ
圆盘运动的微分方程
{
m
x
′
′
=
−
k
x
m
y
′
′
=
−
k
y
\left\{ \begin{aligned} mx'' = -kx \\ my'' = -ky \end{aligned} \right.
{mx′′=−kxmy′′=−ky
令
w
n
2
=
k
/
m
w_n^2=k/m
wn2=k/m
{
x
′
′
+
w
n
2
x
=
0
y
′
′
+
w
n
2
y
=
0
\left\{ \begin{aligned} x'' + w_n^2x = 0 \\ y'' + w_n^2y = 0 \end{aligned} \right.
{x′′+wn2x=0y′′+wn2y=0
其解可写作
{
x
=
X
c
o
s
(
w
n
t
+
a
x
)
y
=
Y
s
i
n
(
w
n
t
+
a
y
)
\left\{ \begin{aligned} x = Xcos(w_nt + a_x) \\ y = Ysin(w_nt + a_y) \end{aligned} \right.
{x=Xcos(wnt+ax)y=Ysin(wnt+ay)
振幅与初相由一瞬间的冲击来决定。
一般情况下,振幅
X
≠
Y
X\neq Y
X=Y,即o’的运动轨迹为椭圆,
o
′
o'
o′的运动称为涡动或进动。自然频率为
o
′
o'
o′的进动角速度。
复变量
z
=
x
+
i
y
z=x+iy
z=x+iy,用一个复变量代表两个实变量
上面的公式可简化为
z
′
′
+
w
n
2
z
=
0
z'' + w_n^2 z = 0
z′′+wn2z=0,解为
z
=
B
1
e
i
w
n
t
+
B
2
e
−
i
w
n
t
z=B_1 e^{iw_nt} + B_2 e^{-iw_nt}
z=B1eiwnt+B2e−iwnt,
B
1
,
B
2
B_1,B_2
B1,B2为复数由一瞬间的冲击来决定。
解的第一项为正进动,运动轨迹为圆,半径为
∣
B
1
∣
|B_1|
∣B1∣,运动方向同
Ω
\Omega
Ω;解的第一项为反进动,运动轨迹为圆,半径为
∣
B
2
∣
|B_2|
∣B2∣,运动方向与
Ω
\Omega
Ω相反。两种圆运动合成了椭圆运动。
o
′
o'
o′的运动必然会有下面四种情况:
B
1
=
B
2
B_1 = B_2
B1=B2,轨迹为直线
B
1
≠
B
2
B_1 \neq B_2
B1=B2,轨迹为椭圆,正进动半径大于反进动半径时,作正进动,反之,作反进动。(正进动与反进动合成后的运动也可以称为进动)
B
1
=
0
,
B
2
≠
0
B_1 = 0, B_2\neq 0
B1=0,B2=0,轨迹为圆,反进动
B
2
=
0
,
B
1
≠
0
B_2 = 0, B_1\neq 0
B2=0,B1=0,轨迹为圆,正进动
o ′ o' o′的进动属于自然振动,频率就是转轴静止时弯曲振动的自然频率。
如果考虑空气阻力,
z
′
′
+
2
n
z
′
+
w
n
2
z
=
0
z''+2nz' + w_n^2 z = 0
z′′+2nz′+wn2z=0,解为
z
=
e
−
n
t
(
B
1
e
i
w
n
′
t
+
B
2
e
−
i
w
n
′
t
)
,
w
n
′
=
w
n
2
−
n
2
z=e^{-nt(B_1e^{iw'_nt}+B_2e^{-iw'_nt})}, w'_n = \sqrt{w_n^2 - n^2}
z=e−nt(B1eiwn′t+B2e−iwn′t),wn′=wn2−n2
这种情况下,涡动是衰减的,
o
′
o'
o′最终趋于
o
o
o
1.2 圆盘的偏心质量引起的振动,临界转速
圆盘重心
c
c
c与
o
′
o'
o′不重合,
o
′
c
o'c
o′c为偏心距
{
x
c
′
′
=
x
′
′
−
e
Ω
2
c
o
s
(
Ω
t
)
y
c
′
′
=
y
′
′
−
e
Ω
2
s
i
n
(
Ω
t
)
\left\{ \begin{aligned} x''_c = x'' - e\Omega^2cos(\Omega t) \\ y''_c = y'' - e\Omega^2sin(\Omega t) \end{aligned} \right.
{xc′′=x′′−eΩ2cos(Ωt)yc′′=y′′−eΩ2sin(Ωt)
由质心运动定理,有
{
m
x
c
′
′
=
−
k
x
m
y
c
′
′
=
−
k
y
\left\{ \begin{aligned} mx''_c = -kx \\ my''_c = -ky \end{aligned} \right.
{mxc′′=−kxmyc′′=−ky
可得
o
′
o'
o′运动微分方程(强迫振动)
{
x
′
′
+
w
n
2
x
=
e
Ω
2
c
o
s
(
Ω
t
)
y
′
′
+
w
n
2
y
=
e
Ω
2
s
i
n
(
Ω
t
)
\left\{ \begin{aligned} x'' + w_n^2 x = e\Omega^2cos(\Omega t)\\ y'' + w_n^2 y = e\Omega^2sin(\Omega t) \end{aligned} \right.
{x′′+wn2x=eΩ2cos(Ωt)y′′+wn2y=eΩ2sin(Ωt)
复变量形式
z
′
′
+
w
n
2
z
=
e
Ω
2
e
i
Ω
t
z'' + w_n^2 z = e \Omega^2 e^{i\Omega t}
z′′+wn2z=eΩ2eiΩt,特解为
z
=
A
e
i
Ω
t
z=Ae^{i\Omega t}
z=AeiΩt
将特解带入方程可得振幅
∣
A
∣
=
∣
e
(
Ω
/
w
n
)
2
1
−
(
Ω
/
w
n
)
2
∣
|A|=|\frac{e(\Omega / w_n)^2}{1-(\Omega / w_n)^2}|
∣A∣=∣1−(Ω/wn)2e(Ω/wn)2∣,
z
=
e
(
Ω
/
w
n
)
2
1
−
(
Ω
/
w
n
)
2
e
i
Ω
t
z=\frac{e(\Omega / w_n)^2}{1-(\Omega / w_n)^2}e^{i\Omega t}
z=1−(Ω/wn)2e(Ω/wn)2eiΩt
可知响应频率与激励频率相同,响应相位与激励相位相同(
Ω
<
w
n
\Omega < w_n
Ω<wn)或相差180°(
Ω
>
w
n
\Omega > w_n
Ω>wn)
转动过程中
o
o
′
c
oo'c
oo′c位于同一直线上,直线绕
o
o
o以角速度
Ω
\Omega
Ω转动,
o
′
o'
o′与
c
c
c作同步正进动
Ω
<
w
n
\Omega < w_n
Ω<wn,
A
>
0
A>0
A>0,
o
′
o'
o′与
c
c
c在
o
o
o的同一侧;
Ω
>
w
n
\Omega > w_n
Ω>wn,
A
<
0
A<0
A<0,
c
c
c在
o
′
o'
o′与
o
o
o的之间,当
Ω
>
>
w
n
\Omega >> w_n
Ω>>wn,
A
≈
−
e
A\approx -e
A≈−e,此时
c
c
c几乎位于
o
o
o,称为自动对心。
Ω
=
w
n
\Omega = w_n
Ω=wn,
A
=
∞
A=\infty
A=∞,由于公式无阻尼,幅值无限大,
w
n
w_n
wn称为临界角速度,单位为rpm,则称为临界转速。
转子工作转速小于临界转速称为刚性轴,反之称为柔性轴。
如果考虑空气阻力,
z
′
′
+
2
n
z
′
+
w
n
2
z
=
e
Ω
2
e
i
Ω
t
z''+2nz'+w_n^2z = e\Omega^2 e^{i\Omega t}
z′′+2nz′+wn2z=eΩ2eiΩt,特解为
z
=
∣
A
∣
e
i
(
Ω
t
−
θ
)
z=|A|e^{i(\Omega t - \theta)}
z=∣A∣ei(Ωt−θ)
将特解带入微分方程,可求出
∣
A
∣
|A|
∣A∣与
θ
\theta
θ
∣
A
∣
=
e
(
Ω
/
w
n
)
2
[
1
−
(
Ω
/
w
n
)
2
]
2
+
(
2
n
/
w
n
)
2
(
Ω
/
w
n
)
2
|A| = \frac{e(\Omega/w_n)^2}{\sqrt{[1-(\Omega/w_n)^2]^2 + (2n/w_n)^2(\Omega/w_n)^2}}
∣A∣=[1−(Ω/wn)2]2+(2n/wn)2(Ω/wn)2e(Ω/wn)2
t
g
(
θ
)
=
(
2
n
/
w
n
)
(
Ω
/
w
n
)
1
−
(
Ω
/
w
n
)
2
tg(\theta)=\frac{(2n/w_n)(\Omega/w_n)}{1-(\Omega/w_n)^2}
tg(θ)=1−(Ω/wn)2(2n/wn)(Ω/wn)
频响曲线为幅值
∣
A
∣
|A|
∣A∣与相位
θ
\theta
θ随频率比
Ω
/
w
n
\Omega/w_n
Ω/wn的变化
由于外阻尼,
Ω
/
w
n
=
1
\Omega/w_n=1
Ω/wn=1时的响应并不是最大值,最大值发生在
Ω
/
w
n
≤
1
\Omega/w_n \leq 1
Ω/wn≤1
在实际中通过测量升速与降速时转子的响应来确定临界转速,因此升速时根据最大响应确定的临界转速比真实的临界转速大,而降速时根据最大响应确定的临界转速比真实的临界转速小。
由于阻尼的存在,
o
′
c
o
o'co
o′co三点并不在同一条直线上。但当
Ω
>
>
w
n
\Omega >> w_n
Ω>>wn,
θ
≈
π
\theta \approx \pi
θ≈π,此时
c
c
c仍然可认为几乎位于
o
o
o,自动对心。
1.3 圆盘相对于转动坐标系的运动
转子相对转动坐标系的运动为相对运动,转子相对固定坐标系的运动为绝对运动
固定坐标系
s
x
y
sxy
sxy,转动坐标系
s
ξ
η
s\xi \eta
sξη,以转子角速度
Ω
\Omega
Ω绕
s
s
s轴转动
o
′
o'
o′的绝对坐标
z
=
x
+
i
y
z=x+iy
z=x+iy,相对坐标
ζ
=
ξ
+
i
η
\zeta=\xi+i\eta
ζ=ξ+iη
z
=
r
e
i
(
θ
+
Ω
t
)
z=re^{i(\theta+\Omega t)}
z=rei(θ+Ωt)
ζ
=
r
e
i
θ
\zeta = re^{i\theta}
ζ=reiθ
因此可以得出
z
=
ζ
e
i
Ω
t
z=\zeta e^{i\Omega t}
z=ζeiΩt,相对坐标与绝对坐标的关系
带入之前的冲击振动微分方程可得(绝对坐标用相对坐标表示),
ζ
′
′
+
2
i
Ω
ζ
′
+
(
w
n
2
−
Ω
2
)
ζ
=
0
\zeta'' + 2i\Omega \zeta' + (w_n^2 - \Omega^2)\zeta = 0
ζ′′+2iΩζ′+(wn2−Ω2)ζ=0,解为
ζ
=
B
1
e
i
(
w
n
−
Ω
)
t
+
B
2
e
−
i
(
w
n
+
Ω
)
t
\zeta = B_1e^{i(w_n-\Omega)t} + B_2e^{-i(w_n+\Omega)t}
ζ=B1ei(wn−Ω)t+B2e−i(wn+Ω)t
转动坐标系下的解仍是正反进动的合成,但两种进动角速度不同,合成的轨迹也不是椭圆,而是花瓣形。
带入之前的不平衡强迫振动微分方程可得,
ζ
′
′
+
2
i
Ω
ζ
′
+
(
w
n
2
−
Ω
2
)
ζ
=
e
Ω
2
\zeta'' + 2i\Omega \zeta' + (w_n^2 - \Omega^2)\zeta = e \Omega^2
ζ′′+2iΩζ′+(wn2−Ω2)ζ=eΩ2,解为
ζ
=
e
(
Ω
/
w
n
)
2
1
−
(
Ω
/
w
n
)
2
\zeta = \frac{e(\Omega/w_n)^2}{1-(\Omega/w_n)^2}
ζ=1−(Ω/wn)2e(Ω/wn)2
ζ
\zeta
ζ与时间无关,即
o
′
o'
o′相对转动坐标系不动,而且
∣
ζ
∣
=
∣
A
∣
|\zeta|=|A|
∣ζ∣=∣A∣,固定坐标系下的响应振幅等于转动坐标系下相对平衡位置的大小
1.4 陀螺力矩
圆盘不装在转轴中间,当转轴弯曲,圆盘轴线会与两支点连线有一夹角
ψ
\psi
ψ
圆盘对质心
o
′
o'
o′的动量矩为
H
=
J
p
Ω
H=J_p \Omega
H=JpΩ,动力矩与两支点连线夹角
ψ
\psi
ψ
由于进动,圆盘的动量矩方向会不断变化,根据动量矩定理,动量矩变化是受到了力矩(动量变化是受到了力)。
力矩
M
g
=
−
(
w
n
x
H
)
=
H
x
w
n
M_g = -(w_n x H) = H x w_n
Mg=−(wnxH)=Hxwn,力矩方向与平面
o
′
A
B
o'AB
o′AB垂直,称为陀螺力矩或回转力矩,是圆盘加于转轴的力矩。
注:一些书上说固定坐标系下叫陀螺力矩,转动坐标系下叫回转力矩。这本书上管这个力矩叫惯性力矩,但我认为在转动坐标系下才叫惯性力矩,地面上的固定坐标系一般认为是惯性坐标系怎么会有惯性力呢?
∣
M
g
∣
=
H
w
n
s
i
n
(
ψ
)
|M_g| = H w_n sin(\psi)
∣Mg∣=Hwnsin(ψ),由于
ψ
\psi
ψ很小,
∣
M
g
∣
=
H
w
n
ψ
|M_g| = H w_n \psi
∣Mg∣=Hwnψ,力矩与转角成正比,相当于弹性力矩
在正进动
0
<
ψ
<
π
/
2
0<\psi <\pi /2
0<ψ<π/2时,陀螺力矩使转轴变形减小,提高了临界角速度
在反进动
π
>
ψ
>
π
/
2
\pi > \psi >\pi /2
π>ψ>π/2时,陀螺力矩使转轴变形减大,降低了临界角速度
1.4.1 圆盘的角速度
圆盘不装在转轴中间时,圆盘有绕圆盘直径的转动,也有绕圆盘轴线的转动,用欧拉角来描述。
移动坐标系
o
′
x
y
z
o'xyz
o′xyz
固结于圆盘的坐标系
o
′
ζ
η
ξ
o'\zeta \eta \xi
o′ζηξ,
o
′
ξ
o'\xi
o′ξ为圆盘中心轴
圆盘初始位于
o
′
ξ
0
η
0
ζ
0
=
o
′
x
y
z
o'\xi_0 \eta_0 \zeta_0 = o'xyz
o′ξ0η0ζ0=o′xyz
绕
o
′
y
o'y
o′y转
θ
y
\theta_y
θy到达
o
′
ξ
1
η
0
ζ
1
o'\xi_1 \eta_0 \zeta_1
o′ξ1η0ζ1
绕
o
′
ξ
1
o'\xi_1
o′ξ1转
θ
ξ
\theta_{\xi}
θξ到达
o
′
ξ
1
η
1
ζ
o'\xi_1 \eta_1 \zeta
o′ξ1η1ζ
绕
o
′
ζ
o'\zeta
o′ζ转
ϕ
\phi
ϕ到达
o
′
ξ
η
ζ
o'\xi \eta \zeta
o′ξηζ
圆盘绝对角速度
w
=
θ
ξ
′
+
θ
y
′
+
ϕ
′
w=\theta_{\xi}'+\theta_y'+\phi'
w=θξ′+θy′+ϕ′
圆盘相对随动坐标系
o
′
ξ
1
η
1
ζ
o'\xi_1 \eta_1 \zeta
o′ξ1η1ζ的转动,
w
1
=
θ
ξ
′
+
θ
y
′
w_1 = \theta_{\xi}'+\theta_y'
w1=θξ′+θy′
w
w
w沿随动坐标系
o
′
ξ
1
η
1
ζ
o'\xi_1 \eta_1 \zeta
o′ξ1η1ζ各轴的分解
{
w
ξ
1
=
θ
ξ
′
w
η
1
=
θ
y
′
c
o
s
(
θ
ξ
)
w
ζ
=
ϕ
′
−
θ
y
′
s
i
n
(
θ
ξ
)
=
Ω
−
θ
y
′
s
i
n
(
θ
ξ
)
\left\{ \begin{aligned} w_{\xi_1} = \theta_{\xi}'\\ w_{\eta_1} = \theta_y'cos(\theta_{\xi})\\ w_{\zeta} = \phi' - \theta_y'sin(\theta_{\xi}) = \Omega - \theta_y'sin(\theta_{\xi}) \end{aligned} \right.
⎩⎪⎨⎪⎧wξ1=θξ′wη1=θy′cos(θξ)wζ=ϕ′−θy′sin(θξ)=Ω−θy′sin(θξ)
w
w
w沿随动坐标系
o
′
ξ
η
ζ
o'\xi \eta \zeta
o′ξηζ各轴的分解
{
w
ξ
=
θ
ξ
′
c
o
s
(
ϕ
)
+
θ
y
′
c
o
s
(
θ
ξ
)
s
i
n
(
ϕ
)
w
η
=
−
θ
ξ
′
s
i
n
(
ϕ
)
+
θ
y
′
c
o
s
(
θ
ξ
)
c
o
s
(
ϕ
)
w
ζ
=
Ω
−
θ
y
′
s
i
n
(
θ
ξ
)
\left\{ \begin{aligned} w_{\xi} = \theta_{\xi}'cos(\phi) + \theta_y'cos(\theta_{\xi})sin(\phi)\\ w_{\eta} = -\theta_{\xi}'sin(\phi) + \theta_y'cos(\theta_{\xi})cos(\phi)\\ w_{\zeta} = \Omega - \theta_y'sin(\theta_{\xi}) \end{aligned} \right.
⎩⎪⎨⎪⎧wξ=θξ′cos(ϕ)+θy′cos(θξ)sin(ϕ)wη=−θξ′sin(ϕ)+θy′cos(θξ)cos(ϕ)wζ=Ω−θy′sin(θξ)
w
w
w沿随动坐标系
o
′
ζ
o'\zeta
o′ζ轴与
o
′
ξ
1
η
1
o'\xi_1 \eta_1
o′ξ1η1平面的分解
{
w
e
=
w
ξ
1
i
1
+
w
η
1
j
1
=
w
ξ
i
+
w
η
j
w
ζ
=
Ω
−
θ
y
′
s
i
n
(
θ
ξ
)
\left\{ \begin{aligned} w_e = w_{\xi_1} i_1 + w_{\eta_1} j_1 = w_{\xi}i + w_{\eta}j \\ w_{\zeta} = \Omega - \theta_y'sin(\theta_{\xi}) \end{aligned} \right.
{we=wξ1i1+wη1j1=wξi+wηjwζ=Ω−θy′sin(θξ)
w
1
w1
w1沿随动坐标系
o
′
ξ
1
η
1
ζ
o'\xi_1 \eta_1 \zeta
o′ξ1η1ζ各轴的分解
{
w
1
ξ
1
=
θ
ξ
′
w
1
η
1
=
θ
y
′
c
o
s
(
θ
ξ
)
w
1
ζ
=
−
θ
y
′
s
i
n
(
θ
ξ
)
\left\{ \begin{aligned} w_{1 \xi_1} = \theta_{\xi}'\\ w_{1 \eta_1} = \theta_y'cos(\theta_{\xi})\\ w_{1 \zeta} = - \theta_y'sin(\theta_{\xi}) \end{aligned} \right.
⎩⎪⎨⎪⎧w1ξ1=θξ′w1η1=θy′cos(θξ)w1ζ=−θy′sin(θξ)
三维旋转:欧拉角、四元数、旋转矩阵、轴角之间的转换 https://zhuanlan.zhihu.com/p/45404840
欧拉角可视化工具 http://danceswithcode.net/engineeringnotes/rotations_in_3d/demo3D/rotations_in_3d_tool.html
1.4.2 圆盘的动量矩
只绕一根轴转动时,动量矩
H
=
J
w
H=Jw
H=Jw。圆盘的转动很复杂,因此动量矩也很复杂。
书上之前转动坐标系为
s
ξ
η
s\xi \eta
sξη,现在为
ζ
ξ
η
\zeta \xi \eta
ζξη
将动量矩在转动坐标系分解,
G
=
J
ξ
w
ξ
i
+
J
η
w
η
j
+
J
ζ
w
ζ
k
G=J_{\xi} w_{\xi} i + J_{\eta} w_{\eta} j + J_{\zeta} w_{\zeta} k
G=Jξwξi+Jηwηj+Jζwζk,前两个转动惯量为直径或赤道转动惯量
J
d
J_d
Jd,最后一个为极转动惯量
J
p
J_p
Jp
轴对称圆盘对其中心
o
′
o'
o′的动量矩,
G
=
J
d
w
e
+
J
p
w
ζ
k
G=J_d w_e + J_p w_{\zeta} k
G=Jdwe+Jpwζk
动量矩在自转轴上的投影,
G
ζ
=
J
p
(
Ω
−
θ
y
′
s
i
n
(
θ
ξ
)
)
k
G_{\zeta} = J_p(\Omega - \theta_y' sin(\theta_{\xi})) k
Gζ=Jp(Ω−θy′sin(θξ))k
G
=
J
d
θ
ξ
′
i
1
+
J
d
θ
y
′
c
o
s
(
θ
ξ
)
j
1
+
J
p
(
Ω
−
θ
y
′
s
i
n
(
θ
ξ
)
)
k
G=J_d\theta_{\xi}' i_1 + J_d \theta_y' cos(\theta_{\xi}) j_1 + J_p(\Omega - \theta_y' sin(\theta_{\xi})) k
G=Jdθξ′i1+Jdθy′cos(θξ)j1+Jp(Ω−θy′sin(θξ))k
转轴截面转角为小量,简化为
G
=
J
p
w
ζ
k
=
H
k
G=J_p w_{\zeta} k = H k
G=Jpwζk=Hk
1.4.3 圆盘的动能
T
=
G
w
/
2
=
(
G
ξ
1
w
ξ
1
+
G
η
1
w
η
1
+
G
ζ
w
ζ
)
/
2
T=Gw/2 = (G_{\xi_1}w_{\xi_1} + G_{\eta_1}w_{\eta_1} + G_{\zeta}w_{\zeta})/2
T=Gw/2=(Gξ1wξ1+Gη1wη1+Gζwζ)/2
T
=
[
J
d
(
θ
ξ
′
2
+
θ
y
′
2
c
o
s
(
θ
ξ
)
2
)
+
J
p
θ
y
′
2
s
i
n
(
θ
ξ
)
2
+
J
p
Ω
2
−
2
J
p
Ω
θ
y
′
s
i
n
(
θ
ξ
)
]
/
2
T=[Jd(\theta_{\xi}'^2 + \theta_y'^2 cos(\theta_{\xi})^2) + J_p\theta_y'^2 sin(\theta_{\xi})^2 + J_p\Omega^2 - 2J_p\Omega \theta'_y sin(\theta_{\xi})]/2
T=[Jd(θξ′2+θy′2cos(θξ)2)+Jpθy′2sin(θξ)2+JpΩ2−2JpΩθy′sin(θξ)]/2
转轴截面转角
θ
ξ
\theta_{\xi}
θξ与
θ
y
\theta_y
θy为小量,则
s
i
n
(
θ
ξ
)
≈
θ
ξ
≈
θ
x
,
c
o
s
(
θ
ξ
)
≈
1
sin(\theta_{\xi}) \approx \theta_{\xi} \approx \theta_x, cos(\theta_{\xi}) \approx 1
sin(θξ)≈θξ≈θx,cos(θξ)≈1,忽略二阶小量,简化为
T
=
[
J
d
(
θ
x
′
2
+
θ
y
′
2
)
+
J
p
Ω
2
−
2
J
p
Ω
θ
y
′
θ
x
]
/
2
T=[Jd(\theta_x'^2 + \theta_y'^2) + J_p\Omega^2 - 2J_p\Omega \theta'_y \theta_x]/2
T=[Jd(θx′2+θy′2)+JpΩ2−2JpΩθy′θx]/2
注:无穷小量Infinitesimals即以数0为极限的变量,无限接近于0,二阶小量是其中一种。
1.5 圆盘绕其中心的转动方程
动量矩定理:动量矩的变化量等于外力矩
移动坐标系
o
′
x
y
z
o'xyz
o′xyz中动量矩的变化率
d
G
d
t
=
M
\frac{dG}{dt}=M
dtdG=M
转动坐标系
o
′
ξ
1
η
1
ζ
o'\xi_1 \eta_1 \zeta
o′ξ1η1ζ中动量矩的变化率
d
G
^
d
t
=
d
G
d
t
−
w
1
×
G
\frac{d\hat{G}}{dt} = \frac{dG}{dt} - w_1\times G
dtdG^=dtdG−w1×G,
w
1
w_1
w1为转动坐标系的角速度。
−
(
w
1
×
G
)
-(w_1 \times G)
−(w1×G)为陀螺力矩
将转动坐标系中的动量矩变化率沿转动坐标系各轴分解
{
d
G
ξ
1
d
t
+
w
1
η
1
G
ζ
−
w
1
ζ
G
η
1
=
M
ξ
1
d
G
η
1
d
t
+
w
1
ζ
G
ξ
−
w
1
ξ
1
G
ζ
=
M
η
1
d
G
ζ
d
t
+
w
1
ξ
1
G
η
1
−
w
1
η
1
G
ξ
1
=
M
ζ
\left\{ \begin{aligned} \frac{dG_{\xi_1}}{dt} + w_{1\eta_1}G_{\zeta} - w_{1\zeta}G_{\eta_1} = M_{\xi_1}\\ \frac{dG_{\eta_1}}{dt} + w_{1\zeta}G_{\xi} - w_{1\xi_1}G_{\zeta} = M_{\eta_1}\\ \frac{dG_{\zeta}}{dt} + w_{1\xi_1}G_{\eta_1} - w_{1\eta_1}G_{\xi_1} = M_{\zeta} \end{aligned} \right.
⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧dtdGξ1+w1η1Gζ−w1ζGη1=Mξ1dtdGη1+w1ζGξ−w1ξ1Gζ=Mη1dtdGζ+w1ξ1Gη1−w1η1Gξ1=Mζ
{
J
d
(
θ
ξ
′
′
+
θ
y
′
2
s
i
n
(
θ
ξ
)
c
o
s
(
θ
ξ
)
)
+
H
θ
y
′
c
o
s
(
θ
ξ
)
=
M
ξ
1
J
d
(
θ
y
′
′
c
o
s
(
θ
ξ
)
−
2
θ
ξ
θ
y
′
s
i
n
(
θ
ξ
)
)
−
H
θ
ξ
′
=
M
η
1
d
H
d
t
=
M
ζ
\left\{ \begin{aligned} J_d(\theta_{\xi}'' + \theta_y'^2 sin(\theta_{\xi})cos(\theta_{\xi})) + H\theta_y'cos(\theta_{\xi}) = M_{\xi_1}\\ J_d(\theta_y''cos(\theta_{\xi}) - 2\theta_{\xi}\theta_y' sin(\theta_{\xi})) - H\theta_{\xi}' = M_{\eta_1}\\ \frac{dH}{dt} = M_{\zeta} \end{aligned} \right.
⎩⎪⎪⎪⎨⎪⎪⎪⎧Jd(θξ′′+θy′2sin(θξ)cos(θξ))+Hθy′cos(θξ)=Mξ1Jd(θy′′cos(θξ)−2θξθy′sin(θξ))−Hθξ′=Mη1dtdH=Mζ
转轴截面转角
θ
ξ
\theta_{\xi}
θξ与
θ
y
\theta_y
θy为小量,则
s
i
n
(
θ
ξ
)
≈
θ
ξ
≈
θ
x
,
c
o
s
(
θ
ξ
)
≈
1
sin(\theta_{\xi}) \approx \theta_{\xi} \approx \theta_x, cos(\theta_{\xi}) \approx 1
sin(θξ)≈θξ≈θx,cos(θξ)≈1,忽略二阶小量,简化为
{
J
d
θ
x
′
′
+
H
θ
y
′
=
M
ξ
1
≈
M
x
J
d
θ
y
′
′
−
H
θ
x
′
=
M
η
1
≈
M
y
d
H
d
t
=
M
ζ
\left\{ \begin{aligned} J_d\theta_x'' + H\theta_y' = M_{\xi_1} \approx M_x\\ J_d\theta_y'' - H\theta_x' = M_{\eta_1} \approx M_y\\ \frac{dH}{dt} = M_{\zeta} \end{aligned} \right.
⎩⎪⎪⎪⎨⎪⎪⎪⎧Jdθx′′+Hθy′=Mξ1≈MxJdθy′′−Hθx′=Mη1≈MydtdH=Mζ
将圆盘的转动微分方程从圆盘的转动坐标系
o
′
ξ
1
η
1
ζ
o'\xi_1\eta_1\zeta
o′ξ1η1ζ转移到转动坐标系
o
′
x
y
ζ
o'xy\zeta
o′xyζ
转子正常运转时,驱动力矩与阻力矩平衡,
M
ζ
=
0
M_{\zeta}=0
Mζ=0
{
J
d
θ
x
′
′
+
J
p
Ω
θ
y
′
=
M
x
J
d
θ
y
′
′
−
J
p
Ω
θ
x
′
=
M
y
\left\{ \begin{aligned} J_d\theta_x'' + J_p \Omega \theta_y' = M_x\\ J_d\theta_y'' - J_p \Omega \theta_x' = M_y \end{aligned} \right.
{Jdθx′′+JpΩθy′=MxJdθy′′−JpΩθx′=My
圆盘所受的外力与外力矩需要转轴给的弹性力与弹性力矩来平衡,在转动坐标系中,外力为惯性力与惯性力矩
圆盘的运动微分方程,包括圆盘的移动与转动微分方程,圆盘
o
′
o'
o′有四个位移,绕x与绕y的转角,沿x与y的位移,
{
m
x
′
′
+
k
11
x
+
k
14
θ
y
=
0
m
y
′
′
+
k
22
y
−
k
23
θ
x
=
0
J
d
θ
x
′
′
+
J
p
Ω
θ
y
′
+
k
32
x
+
k
33
θ
x
=
0
J
d
θ
y
′
′
−
J
p
Ω
θ
x
′
+
k
41
x
+
k
41
θ
y
=
0
(
1.47
)
\left\{ \begin{aligned} mx'' + k_{11}x + k_{14}\theta_y = 0 \\ my'' + k_{22}y - k_{23}\theta_x = 0 \\ J_d\theta_x'' + J_p \Omega \theta_y' + k_{32}x + k_{33}\theta_x = 0\\ J_d\theta_y'' - J_p \Omega \theta_x' + k_{41}x + k_{41}\theta_y = 0 \end{aligned} \right. (1.47)
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧mx′′+k11x+k14θy=0my′′+k22y−k23θx=0Jdθx′′+JpΩθy′+k32x+k33θx=0Jdθy′′−JpΩθx′+k41x+k41θy=0(1.47)
用拉格朗日方程也可以推出1.47
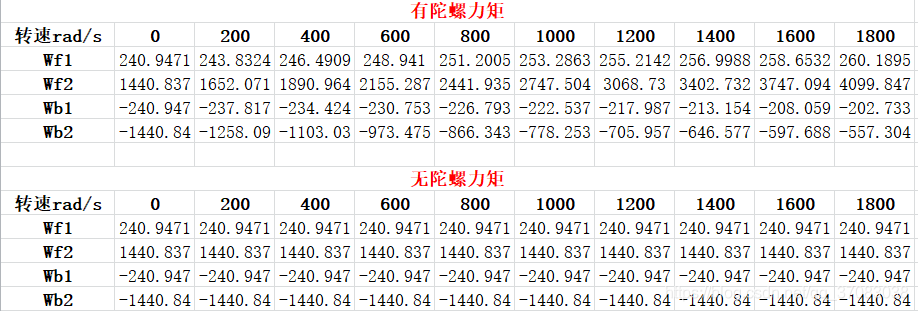
1.6 考虑陀螺力矩时,转子的临界角速度
求解1.47四个微分方程的特征根可得到转子振动的自然频率
w
n
w_n
wn,即进动角速度。
临界角速度就是与进动角速度相等的(工作)转动角速度。
如果转轴截面为圆,则
{
k
11
=
k
22
=
k
r
r
k
33
=
k
44
=
k
ψ
ψ
k
14
=
k
41
=
k
23
=
k
32
=
k
ψ
r
=
k
r
ψ
\left\{ \begin{aligned} k_{11}=k_{22}=k_{rr} \\ k_{33}=k_{44}=k_{\psi \psi} \\ k_{14}=k_{41}=k_{23}=k_{32}=k_{\psi r}=k_{r \psi} \end{aligned} \right.
⎩⎪⎨⎪⎧k11=k22=krrk33=k44=kψψk14=k41=k23=k32=kψr=krψ
复变量
z
=
x
+
i
y
,
ψ
=
θ
y
−
i
θ
x
z=x+iy, \psi = \theta_y - i \theta_x
z=x+iy,ψ=θy−iθx
则1.47变为
{
m
z
′
′
+
k
r
r
z
+
k
r
ψ
ψ
=
0
J
d
ψ
′
′
−
i
J
p
Ω
ψ
+
k
ψ
r
z
+
k
ψ
ψ
ψ
=
0
\left\{ \begin{aligned} mz'' + k_{rr}z + k_{r\psi}\psi = 0 \\ J_d\psi'' - iJ_p \Omega \psi+ k_{\psi r}z + k_{\psi \psi}\psi = 0 \end{aligned} \right.
{mz′′+krrz+krψψ=0Jdψ′′−iJpΩψ+kψrz+kψψψ=0
{
z
′
′
+
w
r
r
2
z
+
w
r
ψ
2
ψ
=
0
ψ
′
′
−
i
J
p
J
d
Ω
ψ
+
w
ψ
r
2
z
+
w
ψ
ψ
2
ψ
=
0
\left\{ \begin{aligned} z'' + w_{rr}^2 z + w_{r\psi}^2 \psi = 0 \\ \psi'' - i\frac{J_p}{J_d} \Omega \psi+ w_{\psi r}^2 z + w_{\psi \psi}^2 \psi = 0 \end{aligned} \right.
⎩⎪⎨⎪⎧z′′+wrr2z+wrψ2ψ=0ψ′′−iJdJpΩψ+wψr2z+wψψ2ψ=0
解为
z
=
z
0
e
i
w
n
t
,
ψ
=
ψ
0
e
i
w
n
t
z=z_0e^{iw_nt}, \psi=\psi_0e^{iw_nt}
z=z0eiwnt,ψ=ψ0eiwnt
带入方程可得
{
(
−
w
n
2
+
w
r
r
2
)
z
0
+
w
r
ψ
2
ψ
0
=
0
w
ψ
r
2
z
0
+
[
−
w
n
2
+
J
p
J
d
Ω
w
n
+
w
ψ
ψ
2
]
ψ
0
=
0
\left\{ \begin{aligned} (-w_n^2 + w_{rr}^2 )z_0 + w_{r\psi}^2 \psi_0 = 0 \\ w_{\psi r}^2 z_0 +[- w_n^2 + \frac{J_p}{J_d} \Omega w_n + w_{\psi \psi}^2 ] \psi_0 = 0 \end{aligned} \right.
⎩⎪⎨⎪⎧(−wn2+wrr2)z0+wrψ2ψ0=0wψr2z0+[−wn2+JdJpΩwn+wψψ2]ψ0=0
将上面复变量微分方程组第一个带入第二个中,得到特征值方程(频率方程),微分方程组变成了一元四次方程
(
−
w
n
2
+
w
r
r
2
)
[
−
w
n
2
+
J
p
J
d
Ω
w
n
+
w
ψ
ψ
2
]
−
w
r
ψ
2
w
ψ
r
2
=
0
(-w_n^2 + w_{rr}^2 )[- w_n^2 + \frac{J_p}{J_d} \Omega w_n + w_{\psi \psi}^2 ] - w_{r\psi}^2w_{\psi r}^2 = 0
(−wn2+wrr2)[−wn2+JdJpΩwn+wψψ2]−wrψ2wψr2=0
该方程有四个根,四个进动角速度
如果没有陀螺力矩
{
(
−
w
n
2
+
w
r
r
2
)
z
0
+
w
r
ψ
2
ψ
0
=
0
(
−
w
n
2
+
w
ψ
ψ
2
)
ψ
0
+
w
ψ
r
2
z
0
=
0
\left\{ \begin{aligned} (-w_n^2 + w_{rr}^2 )z_0 + w_{r\psi}^2 \psi_0 = 0 \\ (-w_n^2 + w_{\psi \psi}^2 )\psi_0 + w_{\psi r}^2 z_0 = 0 \end{aligned} \right.
{(−wn2+wrr2)z0+wrψ2ψ0=0(−wn2+wψψ2)ψ0+wψr2z0=0
(
−
w
n
2
+
w
r
r
2
)
(
−
w
n
2
+
w
ψ
ψ
2
)
−
w
r
ψ
2
w
ψ
r
2
=
0
(-w_n^2 + w_{rr}^2 )(-w_n^2 + w_{\psi \psi}^2) - w_{r\psi}^2w_{\psi r}^2 = 0
(−wn2+wrr2)(−wn2+wψψ2)−wrψ2wψr2=0
w
n
4
−
(
w
r
r
2
+
w
ψ
ψ
2
)
w
n
2
+
w
r
r
2
w
ψ
ψ
2
−
w
r
ψ
2
w
ψ
r
2
=
0
w_n^4 - (w_{rr}^2 + w_{\psi \psi}^2)w_n^2 + w_{rr}^2w_{\psi \psi}^2 - w_{r\psi}^2w_{\psi r}^2 = 0
wn4−(wrr2+wψψ2)wn2+wrr2wψψ2−wrψ2wψr2=0
该方程有四个根,四个进动角速度,但进动角速度不会变化
进动角速度的振型, z ψ = z 0 ψ 0 = − w r ψ 2 w r r 2 − w n 2 \frac{z}{\psi} = \frac{z_0}{\psi_0} = \frac{-w_{r\psi}^2}{w_{rr}^2-w_n^2} ψz=ψ0z0=wrr2−wn2−wrψ2
example
圆盘质量 m = 20 k g m=20kg m=20kg,半径 R = 12 c m R=12cm R=12cm;转轴跨度 l = 75 c m l=75cm l=75cm,直径 d = 3 c m d=3cm d=3cm。圆盘至左支点的距离 a = l / 3 = 25 c m a=l/3=25cm a=l/3=25cm。求转子的进动角速度,振型,临界角速度。
求解进动角速度与临界角速度
# -*- coding: utf-8 -*-
"""
@time: 2021-08-22 下午 04:51
@author: leslie lee
转轴a位置受P力时 a处的挠度与截面转角
r = 4*P*l**3/(243*E*I)
psi = 2*P*l**2/(81*E*I)
转轴a位置受M力矩时 a处的挠度与截面转角
r = 2*M*l**2/(81*E*I)
psi = M*l/(9*E*I)
如果 P=1 M=1 得到的位移就是柔度系数
刚度矩阵为柔度矩阵的逆
sympy 复数结果 提取实部 ? 没有找到简单的好方法
as_real_imag() 结果为复数
re() 提取实部
im() 提取虚部
np.real()无法处理 应该是无法识别sympy中的虚数单位 I
"""
import numpy as np
import sympy as sp
m = 20 # 圆盘质量 kg
R = 12 # 圆盘半径 cm
l = 75 # 转轴长度 cm
d = 3 # 转轴直径 cm
a = l/3 # 圆盘位置 cm
E = 20.58*1e6 # 转轴弹性模量 N/cm^2 钢
# 圆盘转动惯量
Jp = m*R**2/2
Jd = Jp/2
# 转轴截面惯性矩
I = np.pi*d**4/64
# 转轴
P = 1
a_rr = 4*P*l**3/(243*E*I) # 单位力 产生的位移
a_rp = 2*P*l**2/(81*E*I) # 单位力 产生的转角
M = 1
a_pr = 2*M*l**2/(81*E*I) # 单位力矩 产生的位移
a_pp = M*l/(9*E*I) # 单位力矩 产生的转角
A = np.array([[a_rr, a_rp], [a_pr, a_pp]]) # 柔度矩阵 单位力产生的位移 cm/N rad/N cm/M rad/M
K = np.linalg.pinv(A) # 刚度矩阵 产生单位位移所需的力 N/cm N/rad M/rad M/cm
k_rr, k_rp, k_pr, k_pp = K[0,0], K[0,1], K[1,0], K[1,1]
""" 单位换算
krr N/cm
krp=kpr N N/rad=N M/cm=N*cm/cm=N rad无量纲
kpp N*cm
w2_rr = k_rr/m (N/cm)/(kg)=(kg*m/s^2/cm)/(kg)=100*1/s^2
w2_rp = k_rp/m (N)/(kg)=(kg*m/s^2)/(kg)=100*cm/s^2
w2_pp = k_pp/Jd (N*cm)/(kg*cm^2)=(kg*m/s^2*cm)/(kg*cm^2)=100*1/s^2
w2_pr = k_pr/Jd (N)/(kg*cm^2)=(kg*m/s^2)/(kg*cm^2)=100*1/(s^2*cm)
"""
w2_rr = k_rr/m*1e2
w2_rp = k_rp/m*1e2
w2_pp = k_pp/Jd*1e2
w2_pr = k_pr/Jd*1e2
# Omega = 200 # 转速 rad/s
wn = sp.symbols('wn') # 特征根 1/s wn = sp.Symbol('wn')
# 遍历
for Omega in np.arange(0,2000,200):
# 方程1 有陀螺力矩
eq1 = (-wn**2 + w2_rr)*(-wn**2 + (Jp/Jd)*Omega*wn + w2_pp) - w2_rp*w2_pr
# 方程2 无陀螺力矩
eq2 = (-wn**2 + w2_rr)*(-wn**2 + w2_pp) - w2_rp*w2_pr
# 解方程
print(sp.solve(eq2))
求临界转速,我只列举两个方法:
方1:可以绘制坎贝尔图观察
方2:
O
m
e
g
a
Omega
Omega为反向,将
w
n
=
−
Ω
w_n=-\Omega
wn=−Ω带入方程求解,
O
m
e
g
a
Omega
Omega为正向,将
w
n
=
Ω
w_n=\Omega
wn=Ω带入方程求解
Omega = sp.symbols('Omega') # 特征根 1/s Omega = sp.Symbol('Omega')
eq1 = (-Omega**2 + w2_rr)*(-Omega**2 + (Jp/Jd)*Omega*Omega + w2_pp) - w2_rp*w2_pr
eq2 = (-Omega**2 + w2_rr)*(-Omega**2 - (Jp/Jd)*Omega*Omega + w2_pp) - w2_rp*w2_pr
print(sp.solve(eq1))
print(sp.solve(eq2))
'''
[-244.442111078112, 244.442111078112, -1420.23599311756*I, 1420.23599311756*I]
[-844.987991611588, -237.205839436574, 237.205839436574, 844.987991611588]
'''
前三阶临界转速为:反向237.205 正向244.442 反向844.988 rad/s,且只有三阶(取复数的实部)
求解振型
# 角速度为200rad/s时的四阶进动角速度
wns = [243.8324214, 1652.071068, -237.8166687, -1258.086821]
for wn in wns:
z_psi = -w2_rp/(w2_rr - wn**2) # 单位 cm
print(z_psi)
'''
50.93070501720033
-0.5577122225702382
46.29261349959544
-0.9856062550798872
'''
振型图的绘制,以角速度为
200
r
a
d
/
s
200rad/s
200rad/s为例:
求出
o
′
o'
o′处的振型,两端为简支,已知一阶进动与二阶进动的振型形状,则可以绘制出大概的振型图
如果圆盘装在中间,那么
k
r
r
=
48
E
I
/
l
3
,
k
ψ
ψ
=
12
E
I
/
l
,
k
r
ψ
=
k
ψ
r
=
0
k_{rr}=48EI/l^3, k_{\psi \psi}=12EI/l, k_{r \psi}=k_{\psi r} = 0
krr=48EI/l3,kψψ=12EI/l,krψ=kψr=0
微分方程为
{
m
z
′
′
+
k
r
r
z
=
0
J
d
ψ
′
′
−
i
H
ψ
+
k
ψ
ψ
ψ
=
0
\left\{ \begin{aligned} mz'' + k_{rr}z = 0 \\ J_d\psi'' - iH\psi + k_{\psi\psi}\psi = 0 \end{aligned} \right.
{mz′′+krrz=0Jdψ′′−iHψ+kψψψ=0
自然频率为
{
w
n
z
=
k
r
r
/
m
−
w
n
ψ
2
+
J
p
J
d
Ω
w
n
ψ
+
w
ψ
ψ
2
=
0
\left\{ \begin{aligned} w_{nz} = \sqrt{k_{rr}/m} \\ -w_{n \psi}^2 + \frac{J_p}{J_d} \Omega w_{n \psi} + w_{\psi\psi}^2= 0 \end{aligned} \right.
⎩⎪⎨⎪⎧wnz=krr/m−wnψ2+JdJpΩwnψ+wψψ2=0
import numpy as np
import sympy as sp
m = 20 # 圆盘质量 kg
R = 12 # 圆盘半径 cm
l = 75 # 转轴长度 cm
d = 3 # 转轴直径 cm
a = l/2 # 圆盘位置 cm
E = 20.58*1e6 # 转轴弹性模量 N/cm^2 钢
# 圆盘转动惯量
Jp = m*R**2/2
Jd = Jp/2
# 转轴截面惯性矩
I = np.pi*d**4/64
# 转轴
k_rr, k_rp, k_pr, k_pp = 48*E*I/l**3, 0, 0, 12*E*I/l
w2_rr = k_rr/m*1e2
w2_rp = k_rp/m*1e2
w2_pp = k_pp/Jd*1e2
w2_pr = k_pr/Jd*1e2
Omega = sp.symbols('Omega') # 特征根 1/s Omega = sp.Symbol('Omega')
eq1 = -Omega**2 + Jp/Jd*Omega*Omega + w2_pp
eq2 = -Omega**2 - Jp/Jd*Omega*Omega + w2_pp
print((w2_rr)**0.5)
print(sp.solve(eq1))
print(sp.solve(eq2))
'''
215.75649075713136
[-1348.47806723207*I, 1348.47806723207*I]
[-778.544175112742, 778.544175112742]
'''
因此如果圆盘置中,可以求出三个自然频率,第一个方程一个,第二个方程两个。第二个微分方程求出的也是两个进动角速度。
临界转速有两个,一阶临界转速为215.756,二阶临界转速为778.544(反进动)
1.7 弹性支承对转子临界转速的影响
轴承考虑弹性,左右支承点也有位移了就不再是之前的0,使得转子的进动角速度或临界转速降低。
支点坐标
A
′
=
(
x
A
,
y
A
)
,
B
′
=
(
x
B
,
y
B
)
A'=(x_A,y_A), B'=(x_B,y_B)
A′=(xA,yA),B′=(xB,yB),
o
′
o'
o′的坐标
(
x
,
y
)
(x,y)
(x,y)
o
′
o'
o′的坐标以及截面转角
(
x
,
y
,
θ
x
,
θ
y
)
=
(
x
1
+
x
′
,
y
1
+
y
′
,
θ
x
A
+
θ
x
′
,
θ
y
A
+
θ
y
′
)
(x,y,\theta_x,\theta_y) = (x_1+x', y_1+y', \theta_{xA}+\theta_x', \theta_{yA}+\theta_y')
(x,y,θx,θy)=(x1+x′,y1+y′,θxA+θx′,θyA+θy′)
o
′
o'
o′的位移是由两部分叠加的,第一部分为轴承变形造成的转轴位移(刚体位移),第二部分为转轴弯曲变形。
下面考虑当转轴受力而只有支点发生形变时,即受外力后,弹性力来自轴承而非轴承加转轴。求转轴的柔度系数。
支点位移即
o
′
o'
o′位移
{
−
θ
x
A
=
(
y
B
−
y
A
)
/
l
θ
y
A
=
(
x
B
−
x
A
)
/
l
x
1
=
(
1
−
a
/
l
)
x
A
+
(
a
/
l
)
x
B
y
1
=
(
1
−
a
/
l
)
y
A
+
(
a
/
l
)
y
B
\left\{ \begin{aligned} -\theta_{xA} = (y_B - y_A)/l \\ \theta_{yA} = (x_B - x_A)/l \\ x_{1} = (1 - a/l)x_A + (a/l)x_B \\ y_{1} = (1 - a/l)y_A + (a/l)y_B \end{aligned} \right.
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧−θxA=(yB−yA)/lθyA=(xB−xA)/lx1=(1−a/l)xA+(a/l)xBy1=(1−a/l)yA+(a/l)yB
支点弹簧沿x与y方向刚度相同时,可以用复变量表示
{
r
1
=
x
1
+
i
y
1
=
(
1
−
a
/
l
)
r
A
+
(
a
/
l
)
r
B
ψ
A
=
θ
y
A
−
i
θ
x
A
=
(
r
B
−
r
A
)
/
l
\left\{ \begin{aligned} r_1 = x_1 + iy_1 = (1 - a/l)r_A + (a/l)r_B \\ \psi_A = \theta_{yA} -i \theta_{xA} = (r_B - r_A)/l \end{aligned} \right.
{r1=x1+iy1=(1−a/l)rA+(a/l)rBψA=θyA−iθxA=(rB−rA)/l
r
A
r_A
rA与
r
B
r_B
rB为转轴两端简支时求出的支反力与轴承刚度之比,
r
A
=
R
A
/
k
A
r_A = R_A/k_A
rA=RA/kA与
r
B
=
R
B
/
k
B
r_B=R_B/k_B
rB=RB/kB,
k
A
k_A
kA与
k
A
k_A
kA为轴承刚度
受外力时的支反力
{
R
A
=
P
(
l
−
a
)
/
l
R
B
=
P
a
/
l
1.7.1
\left\{ \begin{aligned} R_A=P(l-a)/l \\ R_B=Pa/l \end{aligned} \right. 1.7.1
{RA=P(l−a)/lRB=Pa/l1.7.1
受外力矩时的支反力
{
R
A
=
−
M
/
l
R
B
=
M
/
l
1.7.2
\left\{ \begin{aligned} R_A = -M/l \\ R_B = M/l \end{aligned} \right. 1.7.2
{RA=−M/lRB=M/l1.7.2
将1.7.1带入
o
′
o'
o′位移,得
r
1
,
ψ
A
r_1, \psi_A
r1,ψA,
r
1
=
a
r
r
P
,
ψ
A
=
a
ψ
r
P
r_1=a_{rr}P, \psi_A=a_{\psi r}P
r1=arrP,ψA=aψrP
将1.7.2带入
o
′
o'
o′位移,得
r
1
,
ψ
A
r_1, \psi_A
r1,ψA,
r
1
=
a
r
ψ
M
,
ψ
A
=
a
ψ
ψ
M
r_1=a_{r\psi}M, \psi_A=a_{\psi \psi}M
r1=arψM,ψA=aψψM
这是只有支点位移时的柔度系数(只有轴承变形),再加上支点0位移时的柔度系数(只有转轴变形),即为总柔度系数。
以之前的实例,研究轴承刚度变化对临界转速的影响
将之前求得的转轴柔度系数与支点位移时的柔度系数叠加,得到总的柔度系数
由柔度矩阵取逆得出刚度矩阵,将刚度系数带入特征方程可求出自然频率与临界角速度
import numpy as np
import sympy as sp
m = 20 # 圆盘质量 kg
R = 12 # 圆盘半径 cm
l = 75 # 转轴长度 cm
d = 3 # 转轴直径 cm
a = l/3 # 圆盘位置 cm
E = 20.58*1e6 # 转轴弹性模量 N/cm^2 钢
# 圆盘转动惯量
Jp = m*R**2/2
Jd = Jp/2
# 转轴截面惯性矩
I = np.pi*d**4/64
# 转轴
kc = 81*E*I/l**3
kA = kB = np.inf # kc/10
# 支点变形时转轴的柔度系数
a_rr1 = 1/kA*(1-a/l)**2 + 1/kB*(a/l)**2
a_pr1 = (1/kB*a/l - 1/kA*(1-a/l))/l
a_rp1 = (1/kB*a/l - 1/kA*(1-a/l))/l
a_pp1 = (1/kA + 1/kB)/l**2
# 转轴变形的柔度系数
a_rr2 = 4*l**3/(243*E*I)
a_rp2 = 2*l**2/(81*E*I)
a_pr2 = 2*l**2/(81*E*I)
a_pp2 = l/(9*E*I)
# 合并
a_rr = a_rr1 + a_rr2
a_pr = a_pr1 + a_pr2
a_rp = a_rp1 + a_rp2
a_pp = a_pp1 + a_pp2
A = np.array([[a_rr, a_rp], [a_pr, a_pp]]) # 柔度矩阵 单位力产生的位移 cm/N rad/N cm/M rad/M
K = np.linalg.pinv(A) # 刚度矩阵 产生单位位移所需的力 N/cm N/rad M/rad M/cm
k_rr, k_rp, k_pr, k_pp = K[0,0], K[0,1], K[1,0], K[1,1]
w2_rr = k_rr/m*1e2
w2_rp = k_rp/m*1e2
w2_pp = k_pp/Jd*1e2
w2_pr = k_pr/Jd*1e2
Omega = sp.symbols('Omega') # 特征根 1/s Omega = sp.Symbol('Omega')
eq1 = (-Omega**2 + w2_rr)*(-Omega**2 + (Jp/Jd)*Omega*Omega + w2_pp) - w2_rp*w2_pr
eq2 = (-Omega**2 + w2_rr)*(-Omega**2 - (Jp/Jd)*Omega*Omega + w2_pp) - w2_rp*w2_pr
print(sp.solve(eq1))
print(sp.solve(eq2))

可以发现,减小支承刚度会显著的降低临界转速。

















 1851
1851

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









