







https://www.youtube.com/watch?v=oskkteu6H_s
forced vibrations-SDOF
m
x
′
′
+
k
x
=
F
0
c
o
s
(
w
t
)
mx'' + kx = F_0 cos(wt)
mx′′+kx=F0cos(wt)
solution:
x
=
x
h
+
x
p
x = x_h + x_p
x=xh+xp
homogeneous solution:
m
x
′
′
+
k
x
=
0
mx'' + kx = 0
mx′′+kx=0
x
h
=
c
1
c
o
s
(
w
n
t
)
+
c
2
s
i
n
(
w
n
t
)
,
w
n
=
k
/
m
x_h = c_1 cos(w_nt) + c_2 sin(w_n t), w_n = \sqrt{k/m}
xh=c1cos(wnt)+c2sin(wnt),wn=k/m
particular solution:
solution:
x
p
=
d
1
c
o
s
(
w
t
)
+
d
2
s
i
n
(
w
t
)
x_p = d_1 cos(wt) + d_2 sin(wt)
xp=d1cos(wt)+d2sin(wt)
m
x
p
′
′
+
k
x
p
=
F
0
c
o
s
(
w
t
)
mx_p'' + kx_p = F_0 cos(wt)
mxp′′+kxp=F0cos(wt)
then we get:
d
1
=
F
0
/
(
k
−
w
2
m
)
,
d
2
=
0
d_1=F_0/(k-w^2m), d_2=0
d1=F0/(k−w2m),d2=0
x
=
c
1
c
o
s
(
w
n
t
)
+
c
2
s
i
n
(
w
n
t
)
+
F
0
/
(
k
−
w
2
m
)
c
o
s
(
w
t
)
x = c_1 cos(w_nt) + c_2 sin(w_n t) + F_0/(k-w^2m) cos(wt)
x=c1cos(wnt)+c2sin(wnt)+F0/(k−w2m)cos(wt)
if
w
=
w
n
w = w_n
w=wn, then
x
=
∞
x = \infty
x=∞
if third part is
F
0
/
(
k
−
w
^
n
2
m
)
c
o
s
(
w
^
n
t
)
t
,
w
^
n
→
w
n
F_0/(k-\hat{w}_n^2m) cos(\hat{w}_n t)t, \hat{w}_n \rightarrow w_n
F0/(k−w^n2m)cos(w^nt)t,w^n→wn
x
=
c
1
c
o
s
(
w
n
t
)
+
c
2
s
i
n
(
w
n
t
)
+
F
0
/
(
k
−
w
^
n
2
m
)
c
o
s
(
w
^
n
t
)
t
x = c_1 cos(w_nt) + c_2 sin(w_n t) + F_0/(k-\hat{w}_n^2m) cos(\hat{w}_n t)t
x=c1cos(wnt)+c2sin(wnt)+F0/(k−w^n2m)cos(w^nt)t
then system will lead to instability
How do we know sin and cos are the only solutions to
y
′
′
=
−
y
y′′=−y
y′′=−y?
https://math.stackexchange.com/questions/3293359/how-do-we-know-sin-and-cos-are-the-only-solutions-to-y-y
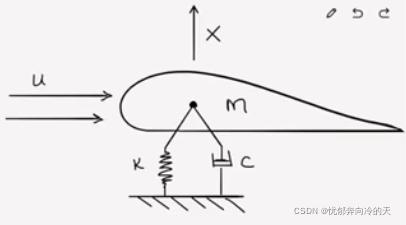
aeroelastic instability-SDOF
m
x
′
′
+
c
x
′
+
k
x
=
f
,
f
=
1
/
2
ρ
u
2
s
C
X
mx'' + cx' + kx = f, f= 1/2 \rho u^2 s C_X
mx′′+cx′+kx=f,f=1/2ρu2sCX
u
u
u free stream velocity
s
s
s,
C
X
C_X
CX coefficient of force in X direction
ρ
u
2
/
2
\rho u^2/2
ρu2/2 also called dynamic pressure
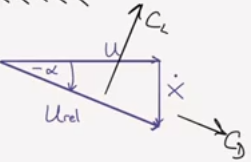
C
X
=
u
r
e
l
2
/
u
2
(
C
L
c
o
s
α
+
C
D
s
i
n
α
)
C_X = u_{rel}^2/u^2 (C_L cos \alpha + C_D sin \alpha)
CX=urel2/u2(CLcosα+CDsinα)
C
L
C_L
CL coefficient of lift,
C
D
C_D
CD coefficient of drag
note:
1
/
2
ρ
s
u
2
C
X
=
1
/
2
ρ
s
u
r
e
l
2
C
L
c
o
s
α
+
1
/
2
ρ
s
u
r
e
l
2
C
D
s
i
n
α
1/2 \rho s u^2C_X = 1/2 \rho s u_{rel}^2 C_L cos \alpha + 1/2 \rho s u_{rel}^2 C_D sin \alpha
1/2ρsu2CX=1/2ρsurel2CLcosα+1/2ρsurel2CDsinα
note:
α
\alpha
α counterclockwise is positive
for small
α
\alpha
α,
−
α
=
t
a
n
−
1
(
x
′
/
u
)
≈
x
′
/
u
- \alpha = tan^{-1} (x'/u) \approx x'/u
−α=tan−1(x′/u)≈x′/u,
u
≈
u
r
e
l
u \approx u_{rel}
u≈urel
C
X
=
C
L
c
o
s
α
+
C
D
s
i
n
α
C_X = C_L cos \alpha + C_D sin \alpha
CX=CLcosα+CDsinα
Taylor expansion,
C
X
(
α
)
=
C
X
(
α
)
∣
α
=
0
+
∂
C
X
∂
α
∣
α
=
0
α
C_X(\alpha) = C_X(\alpha) |_{\alpha = 0} + \frac{\partial C_X}{\partial \alpha}|_{\alpha = 0} \alpha
CX(α)=CX(α)∣α=0+∂α∂CX∣α=0α
C
X
(
α
)
=
(
C
L
c
o
s
α
+
C
D
s
i
n
α
)
∣
α
=
0
+
∂
C
X
∂
α
∣
α
=
0
(
−
x
′
/
u
)
C_X(\alpha) = (C_L cos \alpha + C_D sin \alpha) |_{\alpha = 0} + \frac{\partial C_X}{\partial \alpha}|_{\alpha = 0} (-x'/u)
CX(α)=(CLcosα+CDsinα)∣α=0+∂α∂CX∣α=0(−x′/u)
C
X
(
α
)
=
C
L
∣
α
=
0
+
∂
C
X
∂
α
∣
α
=
0
(
−
x
′
/
u
)
C_X(\alpha) = C_L|_{\alpha = 0}+ \frac{\partial C_X}{\partial \alpha}|_{\alpha = 0} (-x'/u)
CX(α)=CL∣α=0+∂α∂CX∣α=0(−x′/u)
f
=
1
/
2
ρ
u
2
s
(
C
L
∣
α
=
0
+
∂
C
X
∂
α
∣
α
=
0
(
−
x
′
/
u
)
)
f= 1/2 \rho u^2 s (C_L|_{\alpha = 0}+ \frac{\partial C_X}{\partial \alpha}|_{\alpha = 0} (-x'/u))
f=1/2ρu2s(CL∣α=0+∂α∂CX∣α=0(−x′/u))
m
x
′
′
+
(
c
+
1
/
2
ρ
u
s
∂
C
X
∂
α
∣
α
=
0
)
x
′
+
k
x
=
1
/
2
ρ
u
2
s
C
L
∣
α
=
0
mx'' + (c+ 1/2\rho us\frac{\partial C_X}{\partial \alpha}|_{\alpha = 0})x' + kx = 1/2 \rho u^2 s C_L|_{\alpha = 0}
mx′′+(c+1/2ρus∂α∂CX∣α=0)x′+kx=1/2ρu2sCL∣α=0
when ( c + 1 / 2 ρ u s ∂ C X ∂ α ∣ α = 0 ) < 0 (c+ 1/2\rho us\frac{\partial C_X}{\partial \alpha}|_{\alpha = 0})<0 (c+1/2ρus∂α∂CX∣α=0)<0, system is unstable
source term
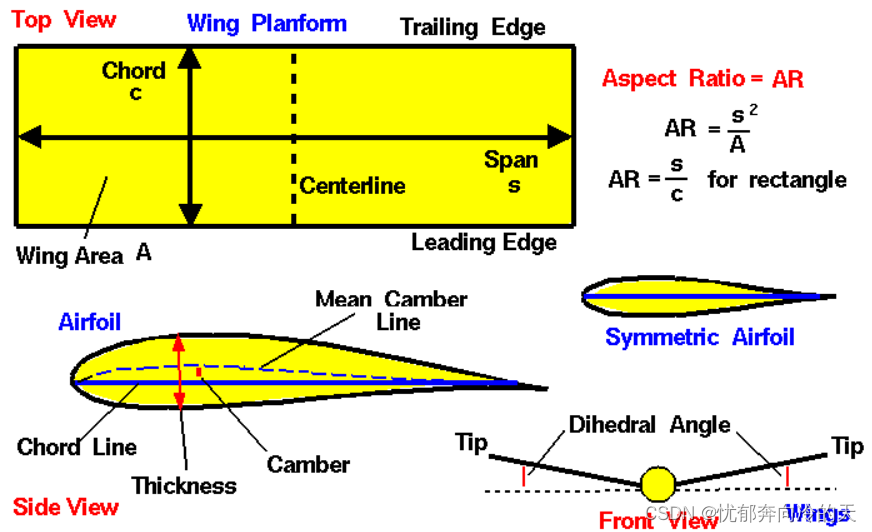
A
s
p
e
c
t
r
a
t
i
o
=
s
2
/
A
Aspect ratio = s^2/A
Aspectratio=s2/A
fluid flow
gallop
equations of motion for an airfoil using Lagrange’s equations
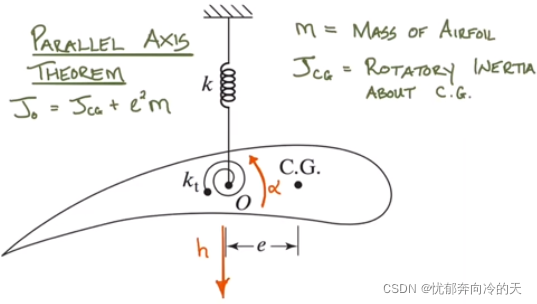
two DoF system: plunge( flap), angle of attack
T
=
1
/
2
m
(
h
′
−
e
α
′
)
2
+
1
/
2
J
C
G
α
′
2
T = 1/2 m(h' - e \alpha')^2 + 1/2 J_{CG} \alpha'^2
T=1/2m(h′−eα′)2+1/2JCGα′2
V
=
1
/
2
k
h
2
+
1
/
2
k
t
α
2
V = 1/2 k h^2 + 1/2 k_t \alpha^2
V=1/2kh2+1/2ktα2
L
=
T
−
V
L = T-V
L=T−V
note: CG=central gravity
substitute these eq into Lagrange’s eq:
(
L
q
i
′
)
t
−
L
q
i
=
Q
i
(L_{q_i'})_t - L_{q_i} =Q_i
(Lqi′)t−Lqi=Qi
equations of motion for the nonlinear oscillator
https://blog.csdn.net/qq_37083038/article/details/120607809


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









