







Kepler’s law
开普勒定律 https://www.detailedpedia.com/wiki-Kepler%27s_laws_of_planetary_motion
开普勒问题 https://www.detailedpedia.com/wiki-Kepler_problem
轨道参数 https://www.detailedpedia.com/wiki-Orbital_elements
Kepler problem:给定两体的质量,位置,速度,求一段时间后两体的位置与速度。将参考系设在一个体上(非惯性系),解(另一个体的轨道)是由六个轨道元素确定的Kepler orbit。六个参数为:确定椭圆形状(偏心率,半轴长),确定椭圆位置(倾角,升交点经度),近地点幅角,真近点角。
开普勒第一定律:每一个行星都沿各自的椭圆轨道环绕太阳,而太阳则处在椭圆的一个焦点中。
开普勒第二定律:在相等时间内,太阳和运动着的行星的连线所扫过的面积都是相等的。
开普勒第三定律:各个行星绕太阳公转周期的平方及其椭圆轨道的半长轴的立方成正比。
由牛顿运动定律推导
牛顿万有引力定律是开普勒定律的发展。
牛顿万有引力定律:
F
=
−
G
m
M
r
2
r
^
F=-G\frac{mM}{r^2}\hat{r}
F=−Gr2mMr^
r
r
r太阳与行星的距离,
r
^
\hat{r}
r^单位向量,太阳指向行星
牛顿第二运动定律:
F
=
m
(
r
r
^
)
′
′
F=m(r \hat{r})''
F=m(rr^)′′,对时间t求导
(
r
r
^
)
′
′
=
−
G
m
M
r
2
r
^
(r \hat{r})'' = -G\frac{mM}{r^2}\hat{r}
(rr^)′′=−Gr2mMr^ 式1
(
r
r
^
)
′
′
=
(
r
′
r
^
+
r
r
^
′
)
′
(r \hat{r})'' = (r' \hat{r} + r \hat{r}')'
(rr^)′′=(r′r^+rr^′)′
r
^
′
=
θ
′
θ
^
\hat{r}' = \theta' \hat{\theta}
r^′=θ′θ^
θ
^
′
=
−
θ
′
r
^
\hat{\theta}' = -\theta' \hat{r}
θ^′=−θ′r^
(
r
′
r
^
+
r
r
^
′
)
′
=
(
r
′
r
^
+
r
θ
′
θ
^
)
′
=
r
′
′
r
^
+
r
′
r
^
′
+
r
′
θ
′
θ
^
+
r
(
θ
′
′
θ
^
+
θ
′
θ
^
′
)
=
(
r
′
′
−
r
θ
′
2
)
r
^
+
(
r
θ
′
′
+
2
r
′
θ
′
)
θ
^
(r' \hat{r} + r \hat{r}')' = (r' \hat{r} + r \theta' \hat{\theta})' = r'' \hat{r} + r' \hat{r}' + r'\theta' \hat{\theta} + r(\theta'' \hat{\theta} + \theta' \hat{\theta}') = (r'' - r\theta'^2)\hat{r} + (r\theta''+2r'\theta')\hat{\theta}
(r′r^+rr^′)′=(r′r^+rθ′θ^)′=r′′r^+r′r^′+r′θ′θ^+r(θ′′θ^+θ′θ^′)=(r′′−rθ′2)r^+(rθ′′+2r′θ′)θ^ 式2
由式1与式2得出:
(
r
′
′
−
r
θ
′
2
)
r
^
+
(
r
θ
′
′
+
2
r
′
θ
′
)
θ
^
=
−
G
m
M
r
2
r
^
(r'' - r\theta'^2)\hat{r} + (r\theta''+2r'\theta')\hat{\theta} = -G\frac{mM}{r^2}\hat{r}
(r′′−rθ′2)r^+(rθ′′+2r′θ′)θ^=−Gr2mMr^
(
r
′
′
+
r
θ
′
2
+
G
m
M
r
2
)
r
^
+
(
r
θ
′
′
+
2
r
′
θ
′
)
θ
^
=
0
(r'' + r\theta'^2 + G\frac{mM}{r^2})\hat{r} + (r\theta''+2r'\theta')\hat{\theta} = 0
(r′′+rθ′2+Gr2mM)r^+(rθ′′+2r′θ′)θ^=0
由系数为0得出:
r
′
′
−
r
θ
′
2
+
G
m
M
r
2
=
0
r'' - r\theta'^2 + G\frac{mM}{r^2} = 0
r′′−rθ′2+Gr2mM=0 式3
r
θ
′
′
+
2
r
′
θ
′
=
0
r\theta''+2r'\theta' = 0
rθ′′+2r′θ′=0 式4
行星角动量
L
=
m
r
2
θ
′
L = mr^2 \theta'
L=mr2θ′,由式4得出:
L
′
=
m
2
r
r
′
θ
′
+
m
r
2
θ
′
′
=
0
L' = m2rr' \theta' + mr^2 \theta'' = 0
L′=m2rr′θ′+mr2θ′′=0,即角动量守恒。
行星走过的扇形面积为:
Δ
A
=
∫
t
1
t
2
r
2
θ
′
/
2
d
t
=
L
2
m
(
t
2
−
t
1
)
\Delta A = \int_{t_1}^{t_2} r^2 \theta'/2 dt = \frac{L}{2m}(t_2-t_1)
ΔA=∫t1t2r2θ′/2dt=2mL(t2−t1)
任意两段时间,只要时间间隔相同,走过的面积就相同,便证明了开普勒第二定律。
求解式3,得出:
1
/
r
=
G
M
m
2
L
2
+
C
c
o
s
(
θ
−
θ
0
)
1/r = \frac{GMm^2}{L^2} + C cos(\theta - \theta_0)
1/r=L2GMm2+Ccos(θ−θ0)
当常数取
C
=
−
e
G
M
m
2
/
L
2
,
θ
0
=
0
C=-eGMm^2/L^2, \theta_0=0
C=−eGMm2/L2,θ0=0,得出:
1
/
r
=
G
M
m
2
L
2
(
1
−
e
c
o
s
θ
)
1/r = \frac{GMm^2}{L^2} (1-e cos\theta)
1/r=L2GMm2(1−ecosθ)
这是圆锥曲线的极坐标形式,当
0
<
e
<
1
0<e<1
0<e<1时,为椭圆曲线,证明了开普勒第一定律。
椭圆面积
π
a
b
\pi ab
πab,行星与太阳连线扫过区域速度
d
A
d
t
=
L
2
m
\frac{dA}{dt} = \frac{L}{2m}
dtdA=2mL,因此行星公转周期
T
=
2
m
π
a
b
L
T = \frac{2m\pi ab}{L}
T=L2mπab
椭圆的数学公式:近拱距
r
p
e
r
i
=
(
1
−
e
)
a
r_{peri}=(1-e)a
rperi=(1−e)a,远拱距
r
a
p
=
(
1
+
e
)
a
r_{ap}=(1+e)a
rap=(1+e)a,偏心率
e
=
c
/
a
e=c/a
e=c/a,则
a
=
(
r
p
e
r
i
+
r
a
p
)
/
2
a=(r_{peri} + r_{ap})/2
a=(rperi+rap)/2。再由
a
2
=
b
2
+
c
2
a^2=b^2+c^2
a2=b2+c2,得出
b
=
r
p
e
r
i
r
a
p
b=\sqrt{r_{peri} r_{ap}}
b=rperirap
行星的能量守恒定律:
E
=
m
r
′
2
+
m
r
2
θ
′
2
/
2
−
G
M
m
/
r
E = mr'^2 + mr^2\theta '^2/2 - GMm/r
E=mr′2+mr2θ′2/2−GMm/r,而近拱点与远拱点的径向速度
r
′
=
0
r'=0
r′=0,因此
E
=
L
2
/
(
2
m
r
2
)
−
G
M
m
/
r
E = L^2/(2mr^2) - GMm/r
E=L2/(2mr2)−GMm/r,得到:
r
2
+
G
M
m
/
E
r
−
L
2
/
(
2
m
E
)
=
0
r^2 + GMm/Er - L^2/(2mE) = 0
r2+GMm/Er−L2/(2mE)=0,该方程的解为近拱距
r
p
e
r
i
r_{peri}
rperi与远拱距
r
a
p
r_{ap}
rap,根据椭圆数学公式得到
a
,
b
a,b
a,b,再带入周期公式得出:
T
=
2
π
a
3
/
2
G
M
T = \frac{2\pi a^{3/2}}{\sqrt{GM}}
T=GM2πa3/2,由此证明开普勒第三定律。
思考:推导时为什么不是
(
r
r
^
)
′
′
=
r
′
r
^
′
+
2
r
′
r
^
′
+
r
r
^
′
′
(r \hat{r})'' = r' \hat{r}' + 2r' \hat{r}' + r\hat{r}''
(rr^)′′=r′r^′+2r′r^′+rr^′′
思考:为什么用扇形面积来表示行星走过的面积
思考:是否可以说 “证明角动量守恒?
思考:太阳旋转吗?太阳是气态吗?没有太阳怎么办?
补充
理论力学——运动学
位矢
r
⃗
\vec{r}
r也称矢径具有大小与方向,位移
Δ
r
⃗
\Delta \vec{r}
Δr是位矢之差
r
⃗
=
r
r
^
\vec{r} = r \hat{r}
r=rr^,
r
r
r为矢径的模长,
r
^
\hat{r}
r^为矢径的单位矢量
https://wuli.wiki//online/Disp.html
https://en.wikipedia.org/wiki/Position_(geometry)
矢径模长变化等于位移在初始矢径方向的投影,
d
r
=
r
^
⋅
d
r
⃗
dr = \hat{r} \cdot d\vec{r}
dr=r^⋅dr
矢径方向的变化等于角速度矢量,
r
^
′
=
θ
′
θ
^
\hat{r}' = \theta' \hat{\theta}
r^′=θ′θ^
角速度方向的变化等于—,
θ
^
′
=
−
θ
′
r
^
\hat{\theta}' = -\theta' \hat{r}
θ^′=−θ′r^
https://zhuanlan.zhihu.com/p/135830309
https://www.wanweibaike.net/wiki-加速度#加速度的分解
https://zhuanlan.zhihu.com/p/158055529
直角坐标系的基矢,
i
^
′
,
j
^
′
,
k
^
′
=
0
\hat{i}', \hat{j}', \hat{k}' = 0
i^′,j^′,k^′=0
自然坐标系的基矢,
e
^
t
,
e
^
n
\hat{e}_t, \hat{e}_n
e^t,e^n
v
⃗
=
d
r
⃗
d
t
\vec{v} = \frac{d \vec{r}}{d t}
v=dtdr
d
r
⃗
d
s
=
e
^
t
\frac{d \vec{r}}{ds} = \hat{e}_t
dsdr=e^t
v
⃗
=
d
r
⃗
d
t
=
d
s
d
t
d
r
⃗
d
s
=
d
s
d
t
e
^
t
=
v
e
^
t
\vec{v} = \frac{d\vec{r}}{dt} = \frac{ds}{dt} \frac{d\vec{r}}{ds} = \frac{ds}{dt} \hat{e}_t = v \hat{e}_t
v=dtdr=dtdsdsdr=dtdse^t=ve^t
a
⃗
=
d
v
⃗
d
t
=
d
2
s
d
t
2
e
^
t
+
d
s
d
t
d
e
^
t
d
t
=
d
2
s
d
t
2
e
^
t
+
v
2
ρ
e
^
n
\vec{a} = \frac{d\vec{v}}{dt} = \frac{d^2s}{dt^2} \hat{e}_t + \frac{ds}{dt} \frac{d\hat{e}_t}{dt} = \frac{d^2s}{dt^2} \hat{e}_t + \frac{v^2}{\rho} \hat{e}_n
a=dtdv=dt2d2se^t+dtdsdtde^t=dt2d2se^t+ρv2e^n
Note:
e
^
t
′
=
θ
′
e
^
n
,
e
^
n
′
=
−
θ
′
e
^
t
,
θ
′
=
v
ρ
\hat{e}_t' = \theta' \hat{e}_n, \hat{e}_n' = -\theta' \hat{e}_t, \theta'=\frac{v}{\rho}
e^t′=θ′e^n,e^n′=−θ′e^t,θ′=ρv
极坐标系的基矢,
e
^
r
,
e
^
θ
\hat{e}_r, \hat{e}_{\theta}
e^r,e^θ
r
⃗
=
r
e
^
r
\vec{r} = r \hat{e}_r
r=re^r
r
⃗
′
=
r
θ
′
e
^
θ
+
r
′
e
^
r
\vec{r}' = r \theta' \hat{e}_{\theta} + r' \hat{e}_r
r′=rθ′e^θ+r′e^r
r
⃗
′
′
=
(
r
′
′
−
r
θ
′
2
)
e
^
r
+
(
2
r
′
θ
′
+
r
θ
′
′
)
e
^
θ
\vec{r}'' = (r'' - r \theta'^2) \hat{e}_r + (2 r' \theta' + r \theta'') \hat{e}_{\theta}
r′′=(r′′−rθ′2)e^r+(2r′θ′+rθ′′)e^θ
Note:
e
^
r
′
=
θ
′
e
^
θ
,
e
^
θ
′
=
−
θ
′
e
^
r
\hat{e}_r' = \theta' \hat{e}_{\theta}, \hat{e}_{\theta}' = -\theta' \hat{e}_r
e^r′=θ′e^θ,e^θ′=−θ′e^r
矢径radius vector
位矢position vector
力矢force vector
坐标系与参考系
https://en.wikipedia.org/wiki/Coordinate_system#Common_coordinate_systems
https://en.wikipedia.org/wiki/Frame_of_reference
coordinate system:通过该系统中的坐标可确定点或几何元素在流形上的位置。常见的坐标系有:Number line, Cartesian coordinate system, Polar coordinate system, Cylindrical and spherical coordinate systems, Homogeneous coordinate system, Generalized coordinates, Canonical coordinates…
manifold:流形是一个拓扑空间,在空间每个点附近类似于欧式空间。
frame of reference: 参考系是一个抽象的坐标系。不同类型的坐标系可附着于参考系,如笛卡尔参考系;强调运动的状态,如旋转参考系;强调参考系变换的方式,如伽利略参考系;强调观测的尺度,如宏观参考系与微观参考系。
思考:为什么会有这么多坐标系与参考系?各自适用于什么条件?
接下来我需要学习Generalized coordinates,Canonical coordinates。
https://en.wikipedia.org/wiki/Rotating_reference_frame
旋转参考系 https://blog.csdn.net/qq_37083038/article/details/121070141
拱点与太阳系
开普勒第一定理:引力场+能量守恒
开普勒第二定律:有心力场+角动量守恒
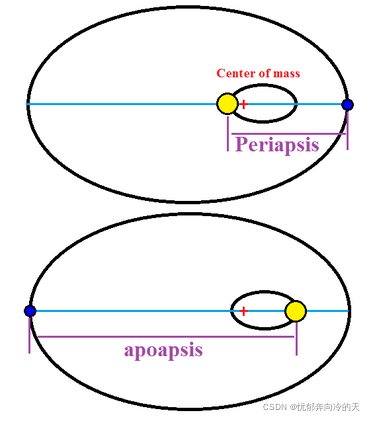
apsides拱点 is the farthest or nearest point in the orbit of a planetary body about its primary body.
apogee近地点, perigee远地点,指月球相对地球的两个位置
ap-,apo- 为前缀表示“近”
peri- 为前缀表示“远”
-gee,-helion 为后缀表示“地球”,“太阳”
apoapsis近拱距,periapsis远拱距
barycenter 质心,重心
https://en.wikipedia.org/wiki/Apsis
两体系统,两个椭圆轨道的焦点(联合质心)重合,两个体都围绕这个焦点上的各自椭圆轨道旋转。由于主天体太大,焦点可能位于主天体内,如地球与月球的联合质心就在地心到地表距离的75%处。
https://www.universetoday.com/34577/inner-and-outer-planets/
广袤:从东到西的长度叫“广”,从南到北的长度叫“袤”。
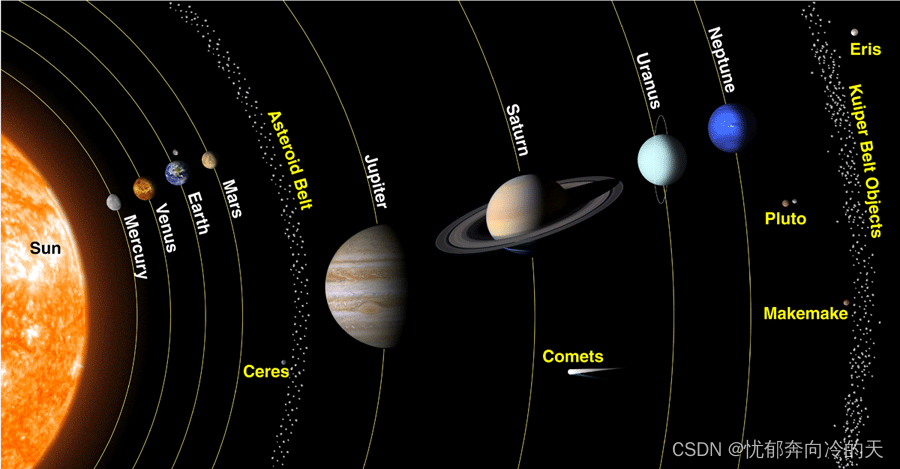
太阳系包括:四个类地行星与小行星带 和 四个巨行星与柯伊伯带。
有心力
https://zhuanlan.zhihu.com/p/116804917
http://www.physikdidaktik.uni-karlsruhe.de/download/201_central_force_and_centripetal_force.pdf
centripetal force = central force
centrifugal force:非惯性系下, 与向心力平衡的一种惯性力
central force field
center of force
a central force on an object is a force that is directed towards or away from a point called center of force.
There are too many names for forces in physics. Most of them are
superfluous. Often they are also ambiguous.
圆锥曲线 conic section
https://www.detailedpedia.com/wiki-Kepler%27s_laws_of_planetary_motion
https://wanweibaike.net/wiki-圆锥曲线
https://wuli.wiki/online/Cone.html
圆锥曲线是用平面切对顶圆锥得到的曲线。
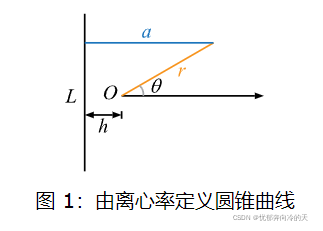
圆锥曲线的极坐标形式:
r
h
+
r
c
o
s
θ
=
e
\frac{r}{h+r cos\theta} = e
h+rcosθr=e或
r
=
p
1
−
e
c
o
s
θ
r = \frac{p}{1 - e cos \theta}
r=1−ecosθp
其中,半通径
p
=
e
h
=
r
π
/
2
p=eh=r\pi/2
p=eh=rπ/2,离心率
e
=
r
/
a
e=r/a
e=r/a
极坐标系原点
O
O
O为焦点,
L
L
L为准线。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









