







目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯基于机器学习的高压线障碍物识别系统
课题背景和意义
在电力线路维护和运营过程中,高压线障碍物(如树木、建筑物等)的接触可能导致电力事故和系统故障,对人员和设备造成严重威胁。机器学习技术,如计算机视觉和深度学习,能够从大量的图像数据中学习并自动提取有用的特征,从而实现高效准确的高压线障碍物识别。能够为电力行业提供科学工具和决策支持,提高电力线路的安全性和运行效率,促进电力行业的可持续发展。
实现技术思路
一、障碍物检测方法
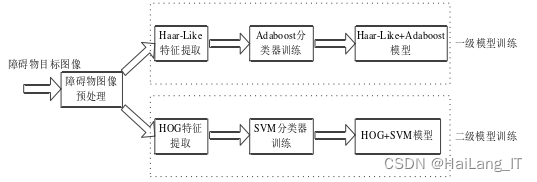
1.1 障碍物识别算法
障碍物识别算法包括特征提取模块和分类模块,采用两级筛选来进行目标的识别检测。第一级使用Haar-Like特征提取目标图像特征,并使用级联分类器Adaboost进行分类,以实现高准确度的识别。第二级使用HOG特征提取目标图像特征,并使用支持向量机进行分类,以减少误检的数量,达到误检率的要求。
对于巡检机器人在高压线上行走的工作原理,根据前方摄像装置拍摄到的图像信息,判断前方行进道路上是否存在障碍物。如果存在障碍物,调用障碍物识别算法模块来确定具体是哪种目标障碍物,并向越障功能模块发送指令。

具体工作流程如下:
- 巡检机器人不断前进,将前方路况图像传输到目标识别系统。
- 对传输过来的图像进行预处理操作。
- 调用第一级模型,自动提取图像的Haar-Like特征,并进行判断,确定当前图像是否为目标。
- 如果第一级模型判断为目标物,进入第二级模型。
- 第二级模型自动提取图像的HOG特征,并进行判断,确定是否为目标物。
- 如果两级模型都判断为目标物,则输出判断结果为有目标物。
- 如果任意一级模型判断为非目标物,则输出判断结果为无目标物。
通过这样的流程,巡检机器人能够根据摄像装置拍摄到的图像信息,判断前方道路上是否存在障碍物,并确定具体的目标障碍物类型,为越障功能模块提供相应的指令。
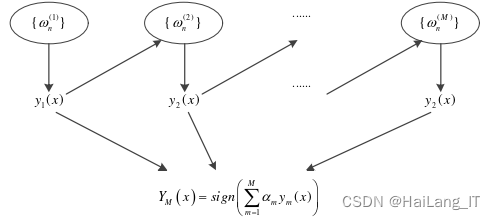
1.2 Adaboost算法
算法结构包括训练过程和识别过程两个方面。
-
训练过程:
- 从拍摄的视频图像中提取障碍物目标图像,并进行预处理操作。
- 选择适当的特征提取方法,提取目标图像的特征。
- 根据提取的特征,选择合适的分类器,例如Adaboost算法。
- 将提取的特征输入到分类器中进行训练,得到对应的检测模型。
-
识别过程:
- 对传输过来的图像进行预处理操作。
- 使用相同类型的特征提取方法提取图像的特征。
- 调用之前生成的检测模型,进行相似度对比判断是否为目标障碍物。
- 最终的判断结果由多个弱分类器进行投票决定,每个弱分类器的比重由Adaboost算法确定。

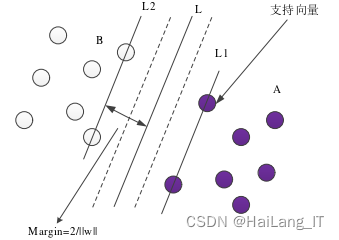
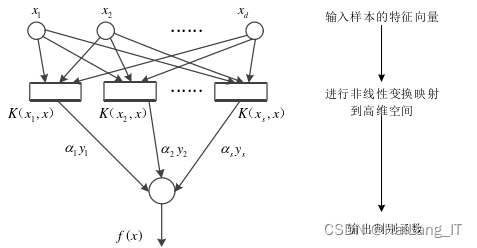
支持向量机(SVM)是另一种用于目标分类的算法,它建立在统计学理论的基础上,具有解决非线性问题和高维识别问题的优势。在SVM中,需要建立目标物和非目标物之间的分割标准,并通过构造最佳分类面来实现分类。在实际情况中,如果目标物种类多于两种或存在线性不可分的问题,可以采用多分类和空间维度转换的方式处理。
1.3 支持向量机
训练过程主要包括特征提取和分类器训练,而识别过程包括预处理、特征提取和使用训练好的模型进行目标判断。

在SVM进行目标分类时,需要建立目标物和非目标物之间的分割标准。一般情况下,当解决两种目标分类并且目标线性可分时,可以在二维空间中构造一个最佳的分类线,使得线的一侧包含全部正确的目标,另一侧包含全部非目标。通过多分类和空间维度转化,SVM可以应对目标种类多于两种或线性不可分的问题,提高目标分类的准确性和泛化能力。这使得SVM在目标分类问题中具有广泛的应用。
Adaboost算法用于训练多个弱分类器,并根据其权重进行投票决策,而支持向量机则用于建立目标分类标准。这些算法结合起来,实现了对障碍物的识别和分类。
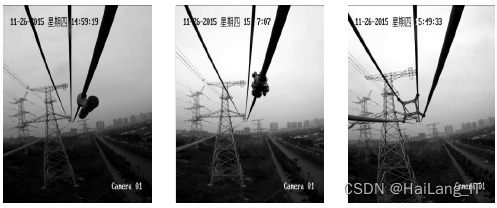
二、 数据集
为了模拟高压线巡检机器人的工作环境,选择了一段未通电的实际高压输电线路作为测试场景,其中包含主要的目标障碍物,如防震锤、间隔器、悬垂线夹和其他金属附件。根据拍摄到的图像,选择不同距离和拍摄角度下的同种障碍物进行比较,以获取具有代表性的输入样本。

以防震锤为例,选择了3000张视觉图像,其中2000张作为训练样本,1000张用于测试样本。根据之前的分析,使用这两种特征值作为分类依据是可行的,并且单独使用一种特征进行分类时,可以达到一定的分类准确率,但存在较高的误检率。

三、实验及结果分析
3.1 实验环境搭建
实验开发环境包括以下工具和库:
- Visual Studio 2010:用于开发和编译项目的集成开发环境。
- OpenCV 2.4.8:一个开源计算机视觉库,提供了各种图像处理和计算机视觉算法的实现。
- MATLAB 2012:一个强大的科学计算和数据分析工具,可以用于算法开发和数据处理。
- QT 5.7.0:一个跨平台的应用程序开发框架,用于创建图形用户界面和应用程序的开发。
检测样本可以分为有目标样本和无目标样本。有目标样本指整幅图像中包含三种待检测目标的任意一种,而无目标样本是指图像中不包含待检测目标类型,但可以包含一些干扰物,用于验证算法的抗干扰性能。
3.2 模型训练
根据预先设定的识别流程,本项目将两种障碍物识别方法结合起来进行目标检测。首先,测试图片经过Haar-Like+Adaboost模型进行一级识别,然后将一级识别的疑似目标输入到HOG+SVM模型进行二级识别。利用将Haar-Like+Adaboost模型和HOG+SVM模型结合的高压线障碍物识别方法可以非常准确地获得特定目标物的识别结果。尽管时间方面有一些损失,但总体的识别结果仍然非常出色。
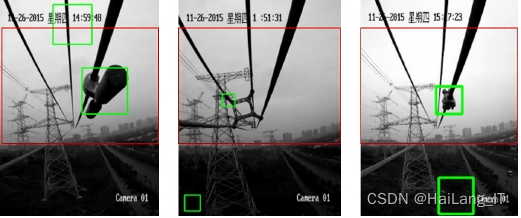
由于摄像机在巡检机器人上的位置和姿态相对固定,拍摄到的目标物在视频图像中的相对位置也是比较固定的。因此,可以在目标物的可能区域内设置一个感兴趣区域(Region Of Interest)。在这个区域内的障碍物目标可以被检测出来,否则则不予考虑。通过分析图片,发现三种障碍物目标在距离摄像机越来越近时,在图像中的相对位置有向上移动的趋势。此外,图像的下方小部分不仅背景复杂,而且障碍物在此区域出现的概率非常小。基于这些观察,可以设置一个感兴趣区域,可以在该区域内进行目标的检测识别,否则不进行检测。
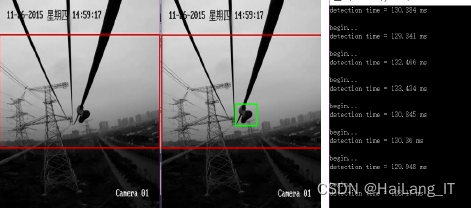
通过设置感兴趣区域,检测时间可以缩短近三分之一左右,而对检测准确率的影响不大。为了更清楚地与单个训练模型的识别效果进行比较,总的检测时间仅比一级检测模型多一点,但识别准确率可以提高到97%以上,同时将识别的误检率降低到接近于0,识别效果远高于预期要求。

最后
我是海浪学长,创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!

















 720
720

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









