







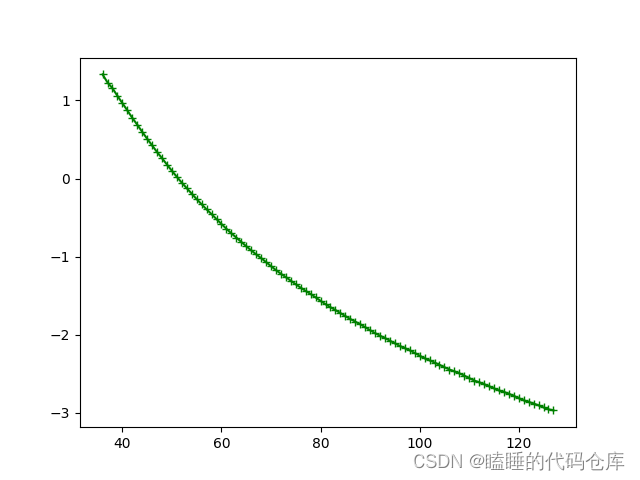
自变量 n 控制点的数量,因变量误差 log10(loss)
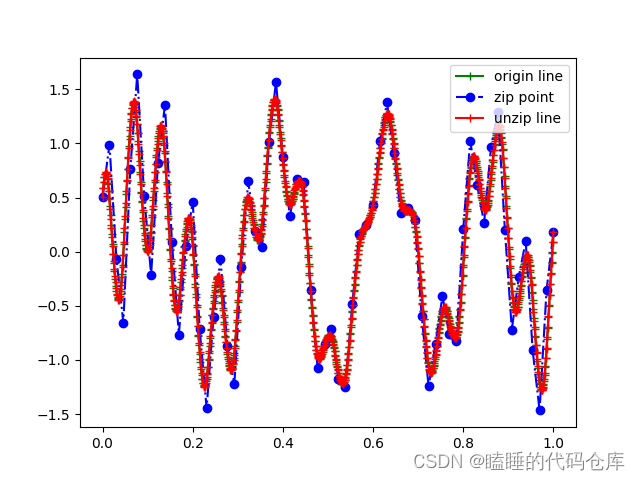
压缩和解压效果图,绿线为原始信号,蓝点为压缩后的控制点,红线为解压出来的信号
源代码:
import numpy as np
from matplotlib import pyplot as plt
def init_N(n, k, X, T):
"""
生成初始化的参数矩阵
:param n: 控制点数量,int
:param k: 基函数的阶数,int, 默认为2,建议2,3,4,最小为2,越大越平滑,越大速度越慢
:param X: 自变量矩阵,取值范围[0,1] (shape=[sample], dtype=float)
:param T: 控制点系数矩阵,取值范围[0,1] (shape=[n + k + 1], dtype=float)
:return N: (shape=[sample, n], dtype=float)
"""
X = X[None] # shape=[1, sample]
T = T[:, None]# shape=[n+k+1, 1]
m = n + k + 1
N = 1 * (T[:-1] <= X) * (X < T[1:]) # shape=[n+k+1, sample]
for k in range(1, k + 1): # 动态规划 k ∈ [1, k]
n = m - k - 1 # 每次更新的控制点数量
c1 = T[k:n + k] - T[:n]
c2 = T[k + 1:n + k + 1] - T[1:n + 1,]
c1[c1 == 0] = 1
c2[c2 == 0] = 1
w1 = (X - T[:n]) / c1
w2 = (T[k + 1:n + k + 1] - X) / c2
N = N[:-1] * w1 + N[1:] * w2
N = N[:n].T # 截取前n个,然后交换行列
return N # sample, n
def init_T_X(k, m, sample):
"""
生成初始化的参数向量
:param k: 基函数的阶数,int, 默认为2,建议2,3,4,最小为2,越大越平滑,越大速度越慢
:param m: 系数矩阵的长度,int,m=n+k+1
:param sample: 采样点数量, int
:return T: 系数矩阵,取值范围[0,1] (shape[n + k + 1], dtype=float)
:return X: 自变量矩阵,取值范围[0,1] (shape=[sample], dtype=float)
"""
# clame 模式
T = np.concatenate([
np.zeros(k),
np.linspace(0, 1, m - 2 * k),
np.ones(k)]
)
gama = 1e-9
first = T[k]
last = T[-k - 1] * (1 - gama) + gama * T[-k - 2]
X = np.linspace(first, last, sample)
return T, X
def unzip(P, k, sample):
"""
解压点,生成曲线
:param P: 控制点矩阵,(shape=[n], dtype=float)
:param k: 基函数的阶数,int, 默认为2,建议2,3,4,最小为2,越大越平滑,越大速度越慢
:param sample: 采样点数量, int
:return data: 解压后的曲线,(shape=[sample], dtype=float)
"""
n = len(P)
T, X = init_T_X(k=k, m=k + n + 1, sample=sample)
N = init_N(n=n, k=k, T=T, X=X)
numerator = np.sum(P[None] * N, axis=-1)
denominator = np.sum(N, axis=-1)
data = numerator / denominator
return data
def zip(data, n, k):
"""
压缩曲线,生成控制点矩阵
:param data: 曲线上的采样点,(shape=[sample], dtype=float)
:param n: 控制点的数量,int
:param k: 曲线的阶数,int
:return P: 控制点矩阵, (shape=[n], dtype=float)
"""
T, X = init_T_X(k=k, m=k + n + 1, sample=sample)
N = init_N(n=n, k=k, T=T, X=X)
# print(N)
a = N # r 行 c列, 其中 r 代表采样点数量,c 代表控制点数量
b = data * np.sum(N, axis=-1) # r 行
P = np.linalg.lstsq(a, b, rcond=None)
# print(P)
return P[0],P[1]
if __name__ == "__main__":
sample = 720 # 采样数量
X = np.linspace(0, 1, sample)
Y = np.sin(7 * np.pi * X + 6) * (0.2 + np.abs(X - 0.8)) + \
np.sin(9 * np.pi * X + 9) * (0.2 + np.abs(X - 0.1)) + \
np.sin(32 * np.pi * X + 1) * (0.2 + np.abs(X - 0.6)) # np.sin(17 * np.pi * X + 1) * (0.2 + np.abs(X - 0.1)) + \
k = 2 # 阶数
y_loss = []
x_loss = list(range(36,128))
for n in x_loss:
P,loss = zip(Y, n, k) # 压缩提取控制点矩阵
y_loss.append( np.log10(loss))
plt.plot(x_loss, y_loss, 'g-', marker='+', label='')
plt.show()
n = 32*2 + 2
P,loss = zip(Y, n, k) # 压缩提取控制点矩阵
unzip_Y = unzip(P, k, sample) # 解压
plt.plot(X, Y, 'g-', marker='+', label='origin line')
plt.plot(np.linspace(0, 1, n), P, 'bo-.', label='zip point')
plt.plot(X, unzip_Y, 'r-', marker='+', label='unzip line')
plt.legend()
plt.show()
















 920
920











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









