






调度类
不同的进程采用不同的调度策略,目前Linux内核中默认实现了4种调度策略,分别是deadline、realtime、CFS 和 idle,它们分别使用struct sched_class来定义调度类。
调度类 描述 调度策略
dl_sched_class deadline调度器 SCHED_DEADLINE
rt_sched_class 实时调度器 SCHED_FIFO、SCHED_RR
fair_sched_class 完全公平调度器 SCHED_NORMAL、SCHED_BATCH
idle_sched_class idle task SCHED_IDLE
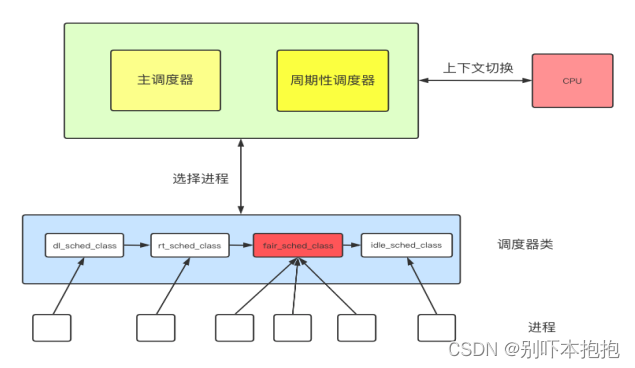
激活进程调度(Scheduler Core)层: 可以用两种方式激活调度,一种是直接的主调度器,比如进程打算睡眠或者其他原因放弃CPU;另外一种是通过周期性调度器,以固定的频率运行,不时检测是否有必要进行进程切换
PS:
3.与fork的交互
除了以上两种场景,即周期性调度器以及主调度器之外,fork创建出新进程的时候也会出现与调度器类的交互,其入口函数是sched_fork:
// kernel/sched/core.c
int sched_fork(unsigned long clone_flags, struct task_struct *p)
{
if (p->sched_class->task_fork)
p->sched_class->task_fork(p);
}
sched_fork函数中会调用到对应调度器类的task_fork成员函数来处理,下面讲到CFS调度器的时候再详细分析对应的函数。
上下文切换: 当进程A切换到进程B的时候,如何能正常切换回去,需要保存当时的现场,包含用户空间的页表、用户空间的栈和硬件上下文信息
struct sched_class {
const struct sched_class *next;//指向下一个调度类,按照优先级
void (*enqueue_task) (struct rq *rq, struct task_struct *p, int flags);//向该调度类的runqueue(就绪队列)中添加进程
void (*dequeue_task) (struct rq *rq, struct task_struct *p, int flags);//向该调度类的runqueue(就绪队列)中删除进程
void (*check_preempt_curr)(struct rq *rq, struct task_struct *p, int flags);//当一个进程被唤醒或者创建的时候,需要检查当前进程是否可以抢占当前cpu上正在运行的进程,如果可以抢占需要标记TIF_NEED_RESCHED flag。
//从runqueue中选择一个最适合运行的task
struct task_struct * (*pick_next_task)(struct rq *rq,
struct task_struct *prev,
struct rq_flags *rf);
优先级
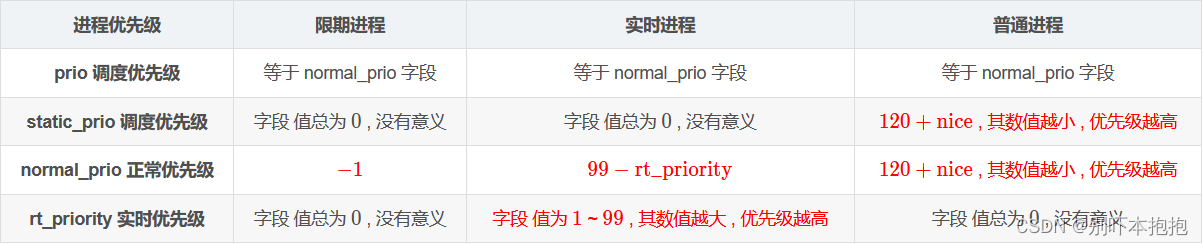
Linux 进程 分为 3 种类型 , " 限期进程 " , " 实时进程 " , " 普通进程 " ; 从 " 进程优先级 " 角度对比 , 优先级从高到低分别是 : 限期进程 > 实时进程 > 普通进程 ;
在 linux-5.6.18\include\linux\sched.h 头文件中 task_struct " 进程描述符 " 结构体 中定义了 进程优先级字段如下 :
int prio; // 调度优先级
int static_prio; // 静态优先级
int normal_prio; // 正常优先级
unsigned int rt_priority; // 实时优先级
这里参考其他博客,具体见这篇优先级的描述,下图是总结:
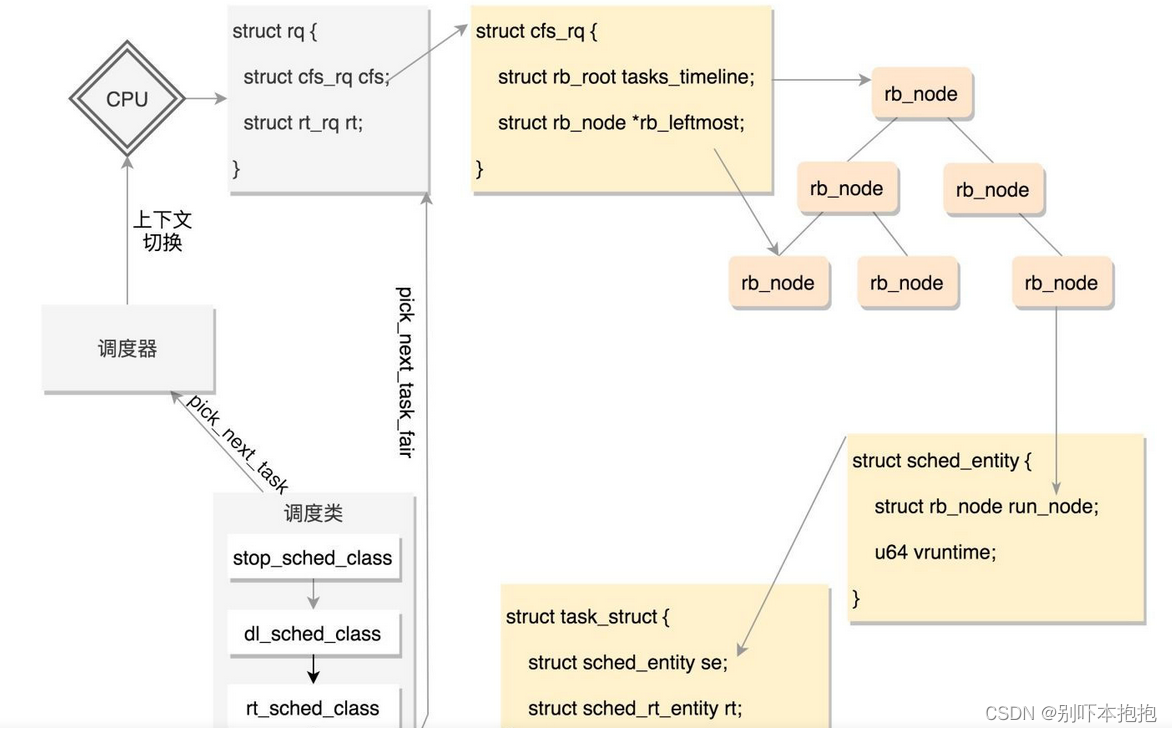
就绪队列
系统中每个CPU都会有一个全局的就绪队列(cpu runqueue),使用struct rq结构体描述,它是per-cpu类型,即每个cpu上都会有一个struct rq结构体。每一个调度类也有属于自己管理的就绪队列。例如,struct cfs_rq是CFS调度类的就绪队列,管理就绪态的struct sched_entity调度实体,后续通过pick_next_task接口从就绪队列中选择最适合运行的调度实体(虚拟时间最小的调度实体)。struct rt_rq是实时调度器就绪队列。struct dl_rq是Deadline调度器就绪队列。
struct rq {
struct cfs_rq cfs;
struct rt_rq rt;
struct dl_rq dl;
};
struct rb_root_cached {
struct rb_root rb_root;//红黑树的根节点
struct rb_node *rb_leftmost;//红黑树的最左边节点
};
struct cfs_rq {
struct load_weight load;//就绪队列管理的所有调度实体权重之和
unsigned int nr_running;//调度实体的个数
u64 min_vruntime;//就绪队列上的最小虚拟时间
struct rb_root_cached tasks_timeline;//就绪队列红黑树的信息
};
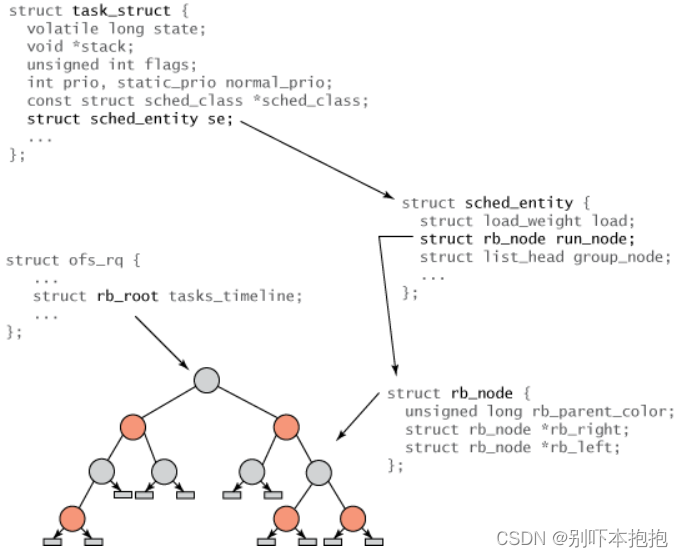
调度实体
Linux通过struct task_struct结构体描述每一个进程。但是调度类管理和调度的单位是调度实体,并不是task_struct。我们在struct task_struct结构体中可以找到以下不同调度类的调度实体。
struct task_struct {
struct sched_entity se;
struct sched_rt_entity rt;
struct sched_dl_entity dl;
/* ... */
}
struct sched_entity {
struct load_weight load;//权重信息
struct rb_node run_node;//就绪队列红黑树上的挂载点
unsigned int on_rq;//调度实体se加入就绪队列后,on_rq标志置为1,从就绪队列删除,on_rq置为0
u64 sum_exec_runtime;//调度实体已经运行的实际时间总和
u64 vruntime;//调度实体已经运行的虚拟时间总和
};
CFS调度器
CFS给每个进程安排一个虚拟运行时间vruntime,正在运行的进程vruntime随tick不断增大,没有运行的进程vruntime不变,vruntime小的会被优先运行
对于不同优先级的进程,换算vruntime时优先级高的算少,优先级低的算多,这样优先级高的进程实际运行时间就变多了
调度队列使用红黑树,红黑树的节点是调度实体















 1369
1369











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









