







在本文中,我们提出一个快且准确的场景文本检测算法,只有两步。这个算法利用全卷积网络模型来直接产生单词或文本行级别的预测,消除了冗余和慢的中间步骤。产生的文本预测,既可以是旋转的矩形也可以是四边形,这些预测结果送入非极大抑制中来得到最终的结果。
本文工作得贡献是三部分:
我们提出了一种包括两步得场景文本检测方法:FCN和NMS合并阶段。FCN直接产生文本区域,消除了中间步骤得冗余和耗时。
算法是灵活得产生单词级别或文本行得预测,其几何形状可以是旋转的矩形或四边形,依赖于特定的应用。
提出的算法在准确率和速度上明显优于现在最好的方法。
该方法利用多层卷积神经网络提取图像特征,再利用该特征分别进行两个任务,像素点的分类,以及对应像素点的框的回归。最后将两个任务结果结合起来,并用非极大值抑制NMS来得到最终检测结果。
网络架构
我们模型的原理图如图3所示。模型可以分解为3部分:特征提取主干,特征合并分支和输出层。.文中使用了PVANet和VGG16,下图1是原文的网络结构图(PVANet)
主干可以是通过ImageNet数据集预训练过的卷积网络,卷积和池化层交替。.网络输入一张图片,经过四个阶段的卷积层可以得到四张feature map, 分别为f4,f3,f2,f1,它们相对于输入图片分别缩小![]() 之后使用上采样、concat(串联)、卷积操作依次得到h1,h2,h3,h4,在得到h4这个融合的feature map后,使用大小为3×3通道数为32的卷积核卷积得到最终的feature map。
之后使用上采样、concat(串联)、卷积操作依次得到h1,h2,h3,h4,在得到h4这个融合的feature map后,使用大小为3×3通道数为32的卷积核卷积得到最终的feature map。
在特征合并分支中,我们逐渐合并它们:
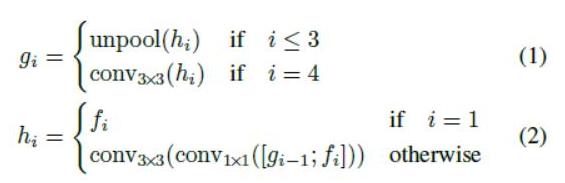
gi是中间状态,hi是合并特征图,操作符[.;.]表示沿通道维度拼接。在每个合并阶段,来自上一阶段的特征map首先喂给unpooling层来扩大二倍它的大小,然后和现在的特征map拼接。接下来,1*1的卷积bottleneck将减少通道的数量减少计算量,后边跟一个3*3的卷积来融合信息来产生这个合并阶段的最终输出。最后的输出,执行3*3的卷积产生合并分支的最终特征图,喂给输出层。
得到最终的feature map后,使用一个大小为1x1通道数为1的卷积核得到一张score map用Fs表示。在feature map上使用一个大小为1×1 通道数为4的卷积核得到text boxes,使用一个大小为1×1 通道数为1的卷积核得到text rotation angle,这里text boxes和text rotation angle合起来称为geometry map用Fg表示。
文中对文本框的定义有两种,一种是旋转矩形(RBOX),另一种是四边形(QUAD)。因为代码只实现了RBOX,所以下面也只对RBOX框进行分析。
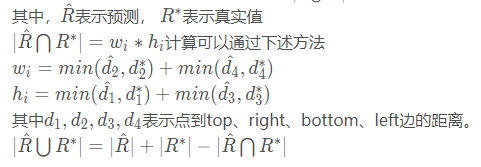
下面我们详细解说第二种表示方式RBOX。我们知道,对于任意一个固定点,如果确定该点到四条边的距离,那么就可以确定一个矩形框。如果再加上角度信息,那么这五个参数d1,d2,d3,d4,以及theta就能唯一确定一个带角度的矩形框。该方法正是采用这个方式得到框回归的GroundTruth。比如图中d图表示每个点的四个距离,e图表示对应的angle。
关于上述的Fs,Fg 要说明的几点
Fs大小为原图的1/4通道数为1,每个像素表示对应于原图中像素为文字的概率值,所以值在[0,1]范围内。
Fg大小也为原图的1/4通道数为5,即4+1(text boxes + text rotation angle)。
text boxes通道数为4,其中text boxes每个像素如果对应原图中该像素为文字,四个通道分别表示该像素点到文本框的四条边的距离,范围定义为输入图像大小,如果输入图像为512,那范围就是[0,512]。下图d表示
text rotation angle通道数为1,其中text rotation angle每个像素如果对应原图中该像素为文字,该像素所在框的倾斜角度,角度范围定义为[-45,45]度。下图e表示
关于训练标签的生成
如上可知,训练标签由两个部分组成,一个是score map的标签,一个是geometry map标签。
1. score map标签的生成方法
首先生成一个与图片大小一样的矩阵,值都为0
根据标定好的四边形框对该四边形框进行缩小,缩小方法下面会详细说明,得到最终结果如上图2a中的绿框
将绿框中的像素赋值1表示正样本的score,其他为负样本的score
最后按照每隔4个像素采样,得到图片1/4大小的score map
上述缩小四边形的方法:
首先定义四个顶点![]() 这四个顶点按照顺时针方向排列
这四个顶点按照顺时针方向排列
计算缩小的参考大小如下式所示,下式表示的是选取与顶点相连的两条边中最小的边的大小记为ri
![]()
其中D(pi,pj)表示点pi与pj之间的l2距离
对于![]() 两点,分别移动
两点,分别移动![]() 来缩小他
来缩小他
geometry map标签的生成方法
几何map可以是RBOX或QUAD中的任意一个。对于RBOX的生成过程如上图(c-e)所示。对于文本区域是以QUAD形式标定的数据集(如ICDAR2015),我们首先生成一个旋转的矩形,该矩形覆盖面积最小的区域。然后对于每个有正分数的像素,我们计算其到文本框四个边界的距离,并将其放到RBOX的4个通道中。
损失函数的定义
![]()














 1188
1188











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









