







上一篇主要是对《2014大疆嵌入式笔试题》的前一部分进行了解答,本文主要是对接下来的几道题进行解答。想要参考上一篇的点击链接:【机试题】2014大疆嵌入式笔试题(附超详细解答,上篇)。
嵌入式基本知识
1、简述处理器中断处理的过程(中断向量、中断保护现场、中断嵌套、中断返回等)。(总分10分)
解答:将中断处理过程之前,首先先看一下什么是中断:
所谓中断,就是指CPU在正常执行程序的时候,由于内部/外部事件的触发、或由程序预先设定,而引起CPU暂时中止当前正在执行的程序,保存被执行程序相关信息到栈中,转而去执行为内部/外部事件、或由程序预先设定的事件的中断服务子程序,待执行完中断服务子程序后,CPU再获取被保存在栈中被中断的程序的信息,继续执行被中断的程序,这一过程叫做中断。
了解了中断的定义,再来看一下中断的几个概念:
- 中断向量:中断服务程序的入口地址;
- 中断向量表:把系统中所有的中断类型码及其对应的中断向量按一定的规律存放在一个区域内,这个存储区域就叫做中断向量表;
- 中断源:软中断/内中断、外中断/硬件中断、异常等。
处理器在中断处理的过程中,一般分为以下几个步骤:
请求中断→中断响应→保护现场→中断服务→恢复现场→中断返回。
详细地讲解:
- 请求中断:当某一中断源需要CPU为其进行中断服务时,就输出中断请求信号,使中断控制系统的中断请求触发器置位,向CPU请求中断。系统要求中断请求信号一直保持到CPU对其进行中断响应为止;
- 中断响应:CPU对系统内部中断源提出的中断请求必须响应,而且自动取得中断服务子程序的入口地址,执行中断服务子程序。对于外部中断,CPU在执行当前指令的最后一个时钟周期去查询INTR引脚,若查询到中断请求信号有效,同时在系统开中断(即IF=1)的情况下,CPU向发出中断请求的外设回送一个低电平有效的中断应答信号,作为对中断请求INTR的应答,系统自动进入中断响应周期;
- 保护现场:主程序和中断服务子程序都要使用CPU内部寄存器等资源,为使中断处理程序不破坏主程序中寄存器的内容,应先将断点处各寄存器的内容(主要是当前IP(将要执行的下一条地址)和CS值(代码段地址))压入堆栈保护起来,再进入的中断处理。现场保护是由用户使用PUSH指令来实现的;
- 中断服务:中断服务是执行中断的主体部分,不同的中断请求,有各自不同的中断服务内容,需要根据中断源所要完成的功能,事先编写相应的中断服务子程序存入内存,等待中断请求响应后调用执行;
- 恢复现场:当中断处理完毕后,用户通过POP指令将保存在堆栈中的各个寄存器的内容弹出,即恢复主程序断点处寄存器的原值。
- 中断返回:在中断服务子程序的最后要安排一条中断返回指令IRET(interrupt return),执行该指令,系统自动将堆栈内保存的 IP(将要执行的下一条地址)和CS值(代码段地址)弹出,从而恢复主程序断点处的地址值,同时还自动恢复标志寄存器FR或EFR的内容,使CPU转到被中断的程序中继续执行。
而中断嵌套是指中断系统正在执行一个中断服务时,有另一个优先级更高的中断提出中断请求,这时会暂时终止当前正在执行的级别较低的中断源的服务程序,去处理级别更高的中断源,待处理完毕,再返回到被中断了的中断服务程序继续执行,这个过程就是中断嵌套。
最后,补充几个知识点:
- CS:IP两个寄存器:指示了 CPU 当前将要读取的指令的地址,其中CS为代码段寄存器,而IP为指令指针寄存器 。可以简单地认为,CS段地址,IP是偏移地址。
- RET:也可以叫做近返回,即段内返回。处理器从堆栈中弹出IP或者EIP,然后根据当前的CS:IP跳转到新的执行地址。如果之前压栈的还有其余的参数,则这些参数也会被弹出;
- RETF:也叫远返回,从一个段返回到另一个段。先弹出堆栈中的IP/EIP,然后弹出CS,有之前压栈的参数也会弹出。(近跳转与远跳转的区别就在于CS是否压栈);
- IRET:用于从中断返回,会弹出IP/EIP,然后CS,以及一些标志。然后从CS:IP执行。
参考文章:牛客网试题。
2、简述处理器在读内存的过程中,CPU核、cache、MMU如何协同工作?画出CPU核、cache、MMU、内存之间的关系示意图加以说明(可以以你熟悉的处理器为例)。(总分10分)
解答:现代操作系统普遍采用虚拟内存管理(Virtual Memory Management) 机制,这需要MMU( Memory Management Unit,内存管理单元) 的支持。有些嵌入式处理器没有MMU,则不能运行依赖于虚拟内存管理的操作系统。
也就是说:操作系统可以分成两类,用MMU的、不用MMU的。用MMU的是:Windows、MacOS、Linux、Android;不用MMU的是:FreeRTOS、VxWorks、UCOS……与此相对应的:CPU也可以分成两类,带MMU的、不带MMU的。带MMU的是:Cortex-A系列、ARM9、ARM11系列;不带MMU的是:Cortex-M系列……(STM32是M系列,没有MMU,不能运行Linux,只能运行一些UCOS、FreeRTOS等等)。
首先我来说一下MMU的作用,MMU就是负责虚拟地址(virtual address)转化成物理地址(physical address)。
下面我来说一下ARM CPU上的地址转换过程涉及三个概念:虚拟地址(VA)(CPU内核对外发出VA),变换后的虚拟地址(MVA)(VA被转换为MVA供cache和MMU使用,在此将MVA转换为PA),物理地址(PA)(最后使用PA读写实际设备)。
- CPU看到的用到的只是VA,CPU不管VA最终是怎样到PA的;
- 而cache、MMU也是看不到VA的,它们使用的是MVA(VA到MVA的转换是由硬件自动完成的);
- 实际设备看不到VA、MVA,读写设备使用的是PA物理地址。
CPU通过地址来访问内存中的单元,如果CPU没有MMU,或者有MMU但没有启动,那么CPU内核在取指令或者访问内存时发出的地址(此时必须是物理地址,假如是虚拟地址,那么当前的动作无效)将直接传到CPU芯片的外部地址引脚上,直接被内存芯片(物理内存)接收,这时候的地址就是物理地址;
如果CPU启用了MMU(一般是在bootloader中的eboot阶段的进入main()函数的时候启用),CPU内核发出的地址将被MMU截获,这时候从CPU到MMU的地址称为虚拟地址,而MMU将这个VA翻译成为PA发到CPU芯片的外部地址引脚上,也就是将VA映射到PA中。
MMU将VA映射到PA是以页(page)为单位的,对于32位的CPU,通常一页为4k,物理内存中的一个物理页面称页为一个页框(page frame)。虚拟地址空间划分成称为页(page)的单位,而相应的物理地址空间也被进行划分,单位是页框(frame)。页和页框的大小必须相同。
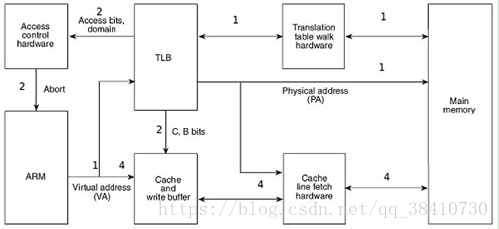
CPU访问内存时的硬件操作顺序,各步骤在图中有对应的标号:
- CPU内核(图1中的ARM)发出VA请求读数据,TLB(translation lookaside buffer)接收到该地址,那为什么是TLB先接收到该地址呢?因为TLB是MMU中的一块高速缓存(也是一种cache,是CPU内核和物理内存之间的cache),它缓存最近查找过的VA对应的页表项,如果TLB里缓存了当前VA的页表项就不必做translation table walk了,否则就去物理内存中读出页表项保存在TLB中,TLB缓存可以减少访问物理内存的次数;
- 页表项中不仅保存着物理页面的基地址,还保存着权限和是否允许cache的标志。MMU首先检查权限位,如果没有访问权限,就引发一个异常给CPU内核。然后检查是否允许cache,如果允许cache就启动cache和CPU内核互操作;
- 如果不允许cache,那直接发出PA从物理内存中读取数据到CPU内核;
- 如果允许cache,则以VA为索引到cache中查找是否缓存了要读取的数据,如果cache中已经缓存了该数据(称为cache hit)则直接返回给CPU内核,如果cache中没有缓存该数据(称为cache miss),则发出PA从物理内存中读取数据并缓存到cache中,同时返回给CPU内核。但是cache并不是只去CPU内核所需要的数据,而是把相邻的数据都取上来缓存,这称为一个cache line。ARM920T的cache line是32个字节,例如CPU内核要读取地址0x30000134~0x3000137的4个字节数据,cache会把地址0x30000120~0x3000137(对齐到32字节地址边界)的32字节都取上来缓存。
关于translation table walk的具体步骤,可以参考文章:MMU和cache详解(TLB机制)、硬件篇之MMU。
基本通信知识
1、请说明总线接口USRT、I2C、USB的异同点(串/并、速度、全/半双工、总线拓扑等)。(总分5分)
解答:UART、I2C、SPI、USB的异同点:
- UART:通用异步串行口,速率不快,可全双工,结构上一般由波特率产生器、UART发送器、UART接收器组成,硬件上两线,一收一发;
- I2C:双向、两线、串行、多主控接口标准。速率不快,半双工,同步接口,具有总线仲裁机制,非常适合器件间近距离经常性数据通信,可实现设备组网;
- SPI:高速同步串行口,高速,可全双工,收发独立,同步接口,可实现多个SPI设备互联,硬件3~4线;
- USB 通用串行总线,高速,半双工,由主机、hub、设备组成。设备可以与下级hub相连构成星型结构。
| 总线接口 | 串/并 | 同步/异步 | 速率 | 工作方式 | 用线 | 总线拓扑结构 | 通信距离 |
| UART | 串 | 异步 | 慢 波特率设置 | 全双工 | 2线 Rx、Tx | RS485支持总线式、 星形、树形 | 远 最远1200m |
| I2C | 串 | 同步 | 慢 | 半双工 | 2线 SDA、SCL | 总线型(特殊的树形) | 近 |
| SPI | 串 | 同步 | 快 | 全双工 | 3线或4线 SCLK、SIMO、 SOMI、SS(片选) | 环形 | 远 |
| USB | 串 | 同步 | 快 | 半双工 | 4线 Vbus(5V)、GND、 D+、D-(3.3V) | 星形 | 近 |
2、列举你所知道的linux内核态和用户态之间的通信方式并给出你认为效率最高的方式,说明理由。(总分5分)
解答:首先对内核态和用户态的概念有所了解:
- 内核态(Kernel Mode):在内核态,代码拥有完全的,不受任何限制的访问底层硬件的能力。可以执行任意的CPU指令,访问任意的内存地址。内核态通常情况下,都是为那些最底层的,由操作系统提供的,可信可靠的代码来运行的。内核态的代码崩溃将是灾难性的,它会影响到整个系统。
- 用户态(User Mode):在用户态,代码不具备直接访问硬件或者访问内存的能力,而必须借助操作系统提供的可靠的,底层的APIs来访问硬件或者内存。由于这种隔离带来的保护作用,用户态的代码崩溃(Crash),系统是可以恢复的。我们大多数的代码都是运行在用户态的。
Linux下内核空间与用户空间进行通信的方式主要有syscall(system call)、procfs和netlink等。
- syscall:一般情况下,用户进程是不能访问内核的。它既不能访问内核所在的内存空间,也不能调用内核中的函数。Linux内核中设置了一组用于实现各种系统功能的子程序,用户可以通过调用他们访问linux内核的数据和函数,这些系统调用接口(SCI)称为系统调用;
- procfs:是一种特殊的伪文件系统 ,是Linux内核信息的抽象文件接口,大量内核中的信息以及可调参数都被作为常规文件映射到一个目录树中,这样我们就可以简单直接的通过echo或cat这样的文件操作命令对系统信息进行查取。
在这几个通信方式中,选择netlink,原因如下:
- 全双工:procfs是基于文件系统,用于内核向用户发送消息;syscall是用户访问内核。它们都是单工通信方式。netlink是一种特殊的通信方式,用于在内核空间和用户空间传递消息,是一种双工通信方式。使用地址协议簇AF_NETLINK,使用头文件include/linux/netlink.h;
- 易于添加:为新特性添加system call、或者procfs是一件复杂的工作,它们会污染kernel(内核),破坏系统的稳定性,这是非常危险的。Netlink的添加,对内核的影响仅在于向netlink.h中添加一个固定的协议类型,然后内核模块和应用层的通信使用一套标准的API。
这里再多介绍一个,用户态和内核态的转换方式:
- 系统调用:这是用户进程主动要求切换到内核态的一种方式,用户进程通过系统调用申请操作系统提供的服务程序完成工作。而系统调用的机制其核心还是使用了操作系统为用户特别开放的一个中断来实现,例如Linux的ine 80h中断;
- 异常:当CPU在执行运行在用户态的程序时,发现了某些事件不可知的异常,这是会触发由当前运行进程切换到处理此异常的内核相关程序中,也就到了内核态,比如缺页异常;
- 外围设备的中断:当外围设备完成用户请求的操作之后,会向CPU发出相应的中断信号,这时CPU会暂停执行下一条将要执行的指令转而去执行中断信号的处理程序,如果先执行的指令是用户态下的程序,那么这个转换的过程自然也就发生了有用户态到内核态的切换。比如硬盘读写操作完成,系统会切换到硬盘读写的中断处理程序中执行后续操作等。
从出发方式看,可以在认为存在前述3种不同的类型,但是从最终实际完成由用户态到内核态的切换操作上来说,涉及的关键步骤是完全一样的,没有任何区别,都相当于执行了一个中断响应的过程,因为系统调用实际上最终是中断机制实现的,而异常和中断处理机制基本上是一样的,用户态切换到内核态的步骤主要包括:
- 从当前进程的描述符中提取其内核栈的ss0及esp0信息;
- 使用ss0和esp0指向的内核栈将当前进程的cs,eip,eflags,ss,esp信息保存起来,这个过程也完成了由用户栈找到内核栈的切换过程,同时保存了被暂停执行的程序的下一条指令;
- 将先前由中断向量检索得到的中断处理程序的cs,eip信息装入相应的寄存器,开始执行中断处理程序,这时就转到了内核态的程序执行了。
系统设计
有一个使用UART进行通信的子系统X,其中UART0进行数据包接收和回复,UART1进行数据包转发。子系统X的通信模块职责是从UART0接收数据包,如果为本地数据包(receiver 为子系统X),则解析数据包中的命令码(2字节)和数据域(0~128字节),根据命令码调用内部的处理程序,并将处理结果通过UART0回复给发送端,如果非本地数据包,则通过UART1转发。如果由你来设计子系统X的通信模块:
1)请设计通信数据包格式,并说明各字段的定义;(总分5分)
2)在一个实时操作系统中,你会如何部署模块中的任务和缓存数据,画出任务间的数据流视图加以说明;(总分5分)
3)你会如何设置任务的优先级,说说优缺点;(总分5分)
4)如果将命令码对应的处理优先级分为高、低两个等级,你又会如何设计;(总分5分)
解答:1)采用帧头+检验位+数据+帧尾的形式,并且数据由数据头、数据内容和数据尾确定。
比如:TB/校验位OR/命令码/ORME/数据域/ME/TE。
其中:“TB/”为帧头,校验位用于判断是否为本地数据包,“OR/”和“/OR”之间的为命令码,“ME/”和“/ME”之间的为数据域,“/TE”为帧尾。

















 899
899

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









