







最近有点时间,就想回顾一下cesium的代码案例,在姿态控制这块自己也是比较欠缺的,最终选择从控制实体姿态方面开始,本次以二个案例的编写开发过程作为主要结构来学习实体的控制,
实体姿态控制其一,雷达动态监测卫星
先看效果图
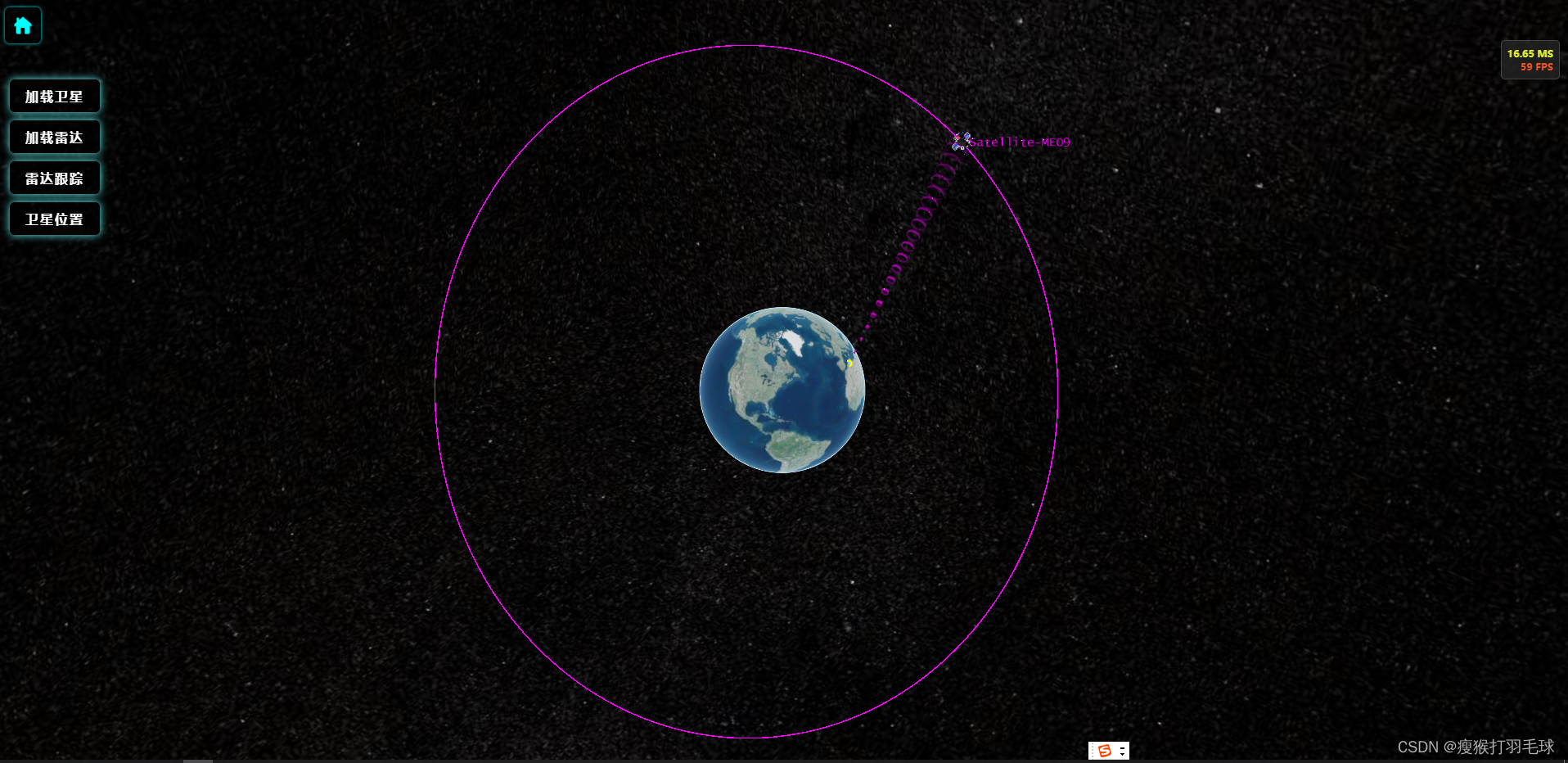
卫星的加载
卫星模型和轨道加载使用czml数据,然后使用dataSource里的CzmlDataSource加载,并根据时间,动态获取卫星的实时位置坐标。具体实现如下图:czml数据下载
c3d_sdk.viewer.dataSources.add(Cesium.CzmlDataSource.load(MEO9ECI)).then((dataSource) => {
const satellite = dataSource.entities.getById("Satellite-MEO9");
c3d_sdk.viewer.clock.onTick.addEventListener((tick) => {
targetPosition = satellite._position.getValue(tick.currentTime)
if(!targetPosition) {
return
}
})
});模拟雷达站加载
采用雷达控制中心点,使用点代替雷达位置,
c3d_sdk.viewer.scene.globe.depthTestAgainstTerrain = true;
c3d_sdk.remover.removeById(c3d_sdk.viewer, 'mklfjmgvaseoirvnoas');
const ent = c3d_sdk.viewer.entities.add({
id: 'mklfjmgvaseoirvnoas',
position: Cesium.Cartesian3.fromDegrees(4.110693, 36.0994841, 1160),
point: {
color: Cesium.Color.SKYBLUE,
pixelSize: 4,
outlineColor: Cesium.Color.YELLOW,
outlineWidth: 2,
}
})姿态控制
使用cylinder承载监听扫描效果,这里需要注意修改orientation 修改代码如下
方位计算代码
//求方位角和朝向
getHeadingPitchRoll(m) {
var m1 = Cesium.Transforms.eastNorthUpToFixedFrame(Cesium.Matrix4.getTranslation(m, new Cesium.Cartesian3()), Cesium.Ellipsoid.WGS84, new Cesium.Matrix4());
var m3 = Cesium.Matrix4.multiply(Cesium.Matrix4.inverse(m1, new Cesium.Matrix4()), m, new Cesium.Matrix4());
var mat3 = Cesium.Matrix4.getMatrix3(m3, new Cesium.Matrix3());
var q = Cesium.Quaternion.fromRotationMatrix(mat3);
var hpr = Cesium.HeadingPitchRoll.fromQuaternion(q);
var heading = Cesium.Math.toDegrees(hpr.heading);
var pitch = Cesium.Math.toDegrees(hpr.pitch);
var roll = Cesium.Math.toDegrees(hpr.roll);
return hpr
},
//模型矩阵
getModelMatrix(pointA, pointB) {
const vector2 = Cesium.Cartesian3.subtract(pointB, pointA, new Cesium.Cartesian3());
//归一化
const normal = Cesium.Cartesian3.normalize(vector2, new Cesium.Cartesian3());
const rotationMatrix3 = Cesium.Transforms.rotationMatrixFromPositionVelocity(pointA, normal, Cesium.Ellipsoid.WGS84);
const orientation = Cesium.Quaternion.fromRotationMatrix(rotationMatrix3);
const modelMatrix4 = Cesium.Matrix4.fromRotationTranslation(rotationMatrix3, pointA);
const hpr = Cesium.HeadingPitchRoll.fromQuaternion(orientation);
return modelMatrix4;
}材质修改代码
readyCanvas(convasid, radius) {
var canvas = document.getElementById(convasid);
let cwidth = 400;
let cheight = 400;
var ctx = canvas.getContext("2d");
ctx.clearRect(0, 0, cwidth, cheight);
ctx.fillStyle = 'rgba(255, 255, 255, 0)';
ctx.fillRect(0, 0, cwidth, cheight);
for (let ii = 0; radius <= 200; ii++) {
ctx.lineWidth = 2;
//开始一个新的绘制路径
ctx.beginPath();
//设置弧线的颜色
var trans = 1.0 - (radius / 255);
ctx.strokeStyle = "rgba(255, 0, 255, " + trans + ")";
var circle = {
x: 200, //圆心的x轴坐标值
y: 200, //圆心的y轴坐标值
r: radius //圆的半径
};
//以canvas中的坐标点(200,200)为圆心,绘制一个半径为50px的圆形
ctx.arc(circle.x, circle.y, circle.r, 0, Math.PI * 2, true);
//按照指定的路径绘制弧线
ctx.stroke();
radius += 10;
}
},下一节讲Matrix的控制















 1140
1140











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









