




 本文介绍了如何利用STM32 HAL库实现串口中断回调的模块化,通过自定义中断回调函数,实现不同项目间的代码解耦。详细解析了HAL库的中断处理机制,并提供了具体的操作步骤,包括在STM32CubeMX中启用`USE_HAL_UART_REGISTER_CALLBACKS`宏,以及使用`HAL_UART_RegisterCallback`注册自定义回调函数,从而在接收完成时调用特定的处理函数,简化移植工作。
本文介绍了如何利用STM32 HAL库实现串口中断回调的模块化,通过自定义中断回调函数,实现不同项目间的代码解耦。详细解析了HAL库的中断处理机制,并提供了具体的操作步骤,包括在STM32CubeMX中启用`USE_HAL_UART_REGISTER_CALLBACKS`宏,以及使用`HAL_UART_RegisterCallback`注册自定义回调函数,从而在接收完成时调用特定的处理函数,简化移植工作。
STM32小技巧(1) HAL自定义串口中断回调 模块化代码进行解耦
STM32小技巧(1) HAL自定义串口中断回调 模块化代码进行解耦
STM32小技巧(2) STM32CubeProgrammer解除读保护的方法
前言
用STM32CubeMx生成初始化配置代码是十分方便的,但是在处理多个项目的时候,就会发现,自动生成的中断函数调用的都是同一个回调函数,在这个回调函数中又要根据不同的句柄来处理,不同的项目外设又有所区别,还是要花点时间来进行移植。比如说,我在项目A中使用到了串口1、串口2、串口3,但是在项目B中,我只使用到了串口2,并且在项目B中,串口2的功能是项目A的串口1的功能,在这种情况下,我就需要再定义一次 HAL_UART_RxCpltCallback() ,然后移植对应的功能。当然也可以重新 define 一个宏,来对应所使用的串口,这样移植上也会快许多。但是假如,后面新来了一个需求,需要实现项目C的串口3的功能,原本只要添加对应的头文件,模块处理这些外设是最简便的,但是这时候会发现,项目C中也定义了HAL_UART_RxCpltCallback(),这就需要人工去移植这部分的代码了。
而我就在想,项目C的串口3是已经实现的模块,且这个模块是单独的.c文件和.h文件,并且不和其他的串口耦合在一起,这样的轮子造起车子来就快了许多了。但是找遍全网,会发现,关于HAL库中串口中断的教程都是基本的实现,没有更深层次的解释了,在学习MEMS库的过程中,看到官方的代码,在使用按钮触发外部中断的时候,竟然可以自定义外部中断的回调函数,进行一番学习之后,终于掌握了自定义中断回调的方法,不仅限于串口中断函数的回调,其他的外设都是相类似的,都是可以自定义中断的回调函数。
高手可以直接跳过第一节的内容,直接跳到第二节看如何进行操作。
一、HAL库的中断实现
中断的原理网上到处都有,也可以参考正点原子这种开源的教程。
我们正常在STM32CubeMX配置好中断后,通过 GENERATE CODE 生成代码,在 stm32f7xx_it.c 中,就会自动生成中断的处理函数,比如 USART2_IRQHandler,可以看到串口2的全局中断仅仅调用了 HAL_UART_IRQHandler 函数,该函数用于处理UART中断请求。
/**
* @brief This function handles USART2 global interrupt.
*/
void USART2_IRQHandler(void)
{
/* USER CODE BEGIN USART2_IRQn 0 */
/* USER CODE END USART2_IRQn 0 */
HAL_UART_IRQHandler(&huart2);
/* USER CODE BEGIN USART2_IRQn 1 */
/* USER CODE END USART2_IRQn 1 */
}
我们进入 HAL_UART_IRQHandler 看看里面具体的实现。这个实现虽然很长,但是逻辑比较简单。首先判断是否有错误产生,没有错误就会调用 UART_Receive_IT,用于在非阻塞模式下接收大量数据。如果在接收的过程中有错误发生,那么就会进行标志位的处理,再下面一点就可以看到 USE_HAL_UART_REGISTER_CALLBACKS 这个宏定义,这就是我们自定义中断函数的关键了。如果我们定义了 USE_HAL_UART_REGISTER_CALLBACKS,那么我们通过注册自定义的中断函数后,在这里 huart->ErrorCallback(huart) 就可以直接跳转到我们的自定义的接收异常函数了,而不是 HAL_UART_ErrorCallback(huart) 这个HAL通用的接收异常处理函数。
注:F7的板子在公司,写这个教程的时候手头只有 NUCLEO-L152RE 的开发板,使用的库是 STM32Cube_FW_L1_V1.10.2。 STM32CubeMx生成的代码有所区别,但原理上是一样的。F767ZI 是通过 huart->RxISR(huart) 这个方式来调用中断处理函数的,最终调用的是 UART_RxISR_8BIT 这样子的函数。当然后面推出了新的固件版本,也可能导致具体的实现有所区别。
void HAL_UART_IRQHandler(UART_HandleTypeDef *huart)
{
uint32_t isrflags = READ_REG(huart->Instance->SR);
uint32_t cr1its = READ_REG(huart->Instance->CR1);
uint32_t cr3its = READ_REG(huart->Instance->CR3);
uint32_t errorflags = 0x00U;
uint32_t dmarequest = 0x00U;
/* 如果没有错误发生 */
errorflags = (isrflags & (uint32_t)(USART_SR_PE | USART_SR_FE | USART_SR_ORE | USART_SR_NE));
if (errorflags == RESET)
{
/* UART处于接收模式 -------------------------------------------------*/
if (((isrflags & USART_SR_RXNE) != RESET) && ((cr1its & USART_CR1_RXNEIE) != RESET))
{
UART_Receive_IT(huart);
return;
}
}
/* 如果发生一些错误 */
if ((errorflags != RESET) && (((cr3its & USART_CR3_EIE) != RESET) || ((cr1its & (USART_CR1_RXNEIE | USART_CR1_PEIE)) != RESET)))
{
/* UART parity error interrupt occurred ----------------------------------*/
if (((isrflags & USART_SR_PE) != RESET) && ((cr1its & USART_CR1_PEIE) != RESET))
{
huart->ErrorCode |= HAL_UART_ERROR_PE;
}
/* UART noise error interrupt occurred -----------------------------------*/
if (((isrflags & USART_SR_NE) != RESET) && ((cr3its & USART_CR3_EIE) != RESET))
{
huart->ErrorCode |= HAL_UART_ERROR_NE;
}
/* UART frame error interrupt occurred -----------------------------------*/
if (((isrflags & USART_SR_FE) != RESET) && ((cr3its & USART_CR3_EIE) != RESET))
{
huart->ErrorCode |= HAL_UART_ERROR_FE;
}
/* UART Over-Run interrupt occurred --------------------------------------*/
if (((isrflags & USART_SR_ORE) != RESET) && (((cr1its & USART_CR1_RXNEIE) != RESET) || ((cr3its & USART_CR3_EIE) != RESET)))
{
huart->ErrorCode |= HAL_UART_ERROR_ORE;
}
/* Call UART Error Call back function if need be --------------------------*/
if (huart->ErrorCode != HAL_UART_ERROR_NONE)
{
/* UART in mode Receiver -----------------------------------------------*/
if (((isrflags & USART_SR_RXNE) != RESET) && ((cr1its & USART_CR1_RXNEIE) != RESET))
{
UART_Receive_IT(huart);
}
/* If Overrun error occurs, or if any error occurs in DMA mode reception,
consider error as blocking */
dmarequest = HAL_IS_BIT_SET(huart->Instance->CR3, USART_CR3_DMAR);
if (((huart->ErrorCode & HAL_UART_ERROR_ORE) != RESET) || dmarequest)
{
/* Blocking error : transfer is aborted
Set the UART state ready to be able to start again the process,
Disable Rx Interrupts, and disable Rx DMA request, if ongoing */
UART_EndRxTransfer(huart);
/* Disable the UART DMA Rx request if enabled */
if (HAL_IS_BIT_SET(huart->Instance->CR3, USART_CR3_DMAR))
{
CLEAR_BIT(huart->Instance->CR3, USART_CR3_DMAR);
/* Abort the UART DMA Rx channel */
if (huart->hdmarx != NULL)
{
/* Set the UART DMA Abort callback :
will lead to call HAL_UART_ErrorCallback() at end of DMA abort procedure */
huart->hdmarx->XferAbortCallback = UART_DMAAbortOnError;
if (HAL_DMA_Abort_IT(huart->hdmarx) != HAL_OK)
{
/* Call Directly XferAbortCallback function in case of error */
huart->hdmarx->XferAbortCallback(huart->hdmarx);
}
}
else
{
/* Call user error callback */
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered error callback*/
huart->ErrorCallback(huart);
#else
/*Call legacy weak error callback*/
HAL_UART_ErrorCallback(huart);
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
}
}
else
{
/* Call user error callback */
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered error callback*/
huart->ErrorCallback(huart);
#else
/*Call legacy weak error callback*/
HAL_UART_ErrorCallback(huart);
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
}
}
else
{
/* Non Blocking error : transfer could go on.
Error is notified to user through user error callback */
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered error callback*/
huart->ErrorCallback(huart);
#else
/*Call legacy weak error callback*/
HAL_UART_ErrorCallback(huart);
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
huart->ErrorCode = HAL_UART_ERROR_NONE;
}
}
return;
} /* 如果发生错误则结束 */
/* UART 处于发送模式,准备在非阻塞模式下发送大量数据。 ---------------------------*/
if (((isrflags & USART_SR_TXE) != RESET) && ((cr1its & USART_CR1_TXEIE) != RESET))
{
UART_Transmit_IT(huart);
return;
}
/* UART 处于发送结束模式,在非阻塞模式下结束传输。 -------------------------------*/
if (((isrflags & USART_SR_TC) != RESET) && ((cr1its & USART_CR1_TCIE) != RESET))
{
UART_EndTransmit_IT(huart);
return;
}
}
然后我们看看没有接收错误发生时,调用的函数 UART_Receive_IT(huart)。这个首先根据数据位的长度来进行接收数据,(9bit和少于9bit的处理是不一样的),串口数据就保存在 huart->pRxBuffPtr,每接收一个数据,那么 huart->RxXferCount 就减一,直至为0,这时候就会触发接收完成的中断了。至于需要接收几个字节来触发中断,就取决于初始化时候的设置了。
huart->pRxBuffPtr变为0后,会先关闭中断,如果使能了USE_HAL_UART_REGISTER_CALLBACKS ,就会调用 huart->RxCpltCallback(huart),我们就可以通过注册中断处理函数来跳转到我们自定义的函数,而不是HAL库本身的接收完成中断函数HAL_UART_RxCpltCallback(huart)。而如果我们使能了USE_HAL_UART_REGISTER_CALLBACKS,却没有去注册自定义函数,最终调用的还是HAL库本身的中断处理函数,这是因为在 HAL_UART_Init 初始化中会调用函数 UART_InitCallbacksToDefault,这个函数会将所有的回调函数初始化为其默认值。
注:接收完成后,这个会自动将关闭中断,接收完指定的字节之后,还需要继续接收的话就需要再次打开中断了。
static HAL_StatusTypeDef UART_Receive_IT(UART_HandleTypeDef *huart)
{
uint16_t *tmp;
/* 检查接收进程是否正在进行 */
if (huart->RxState == HAL_UART_STATE_BUSY_RX)
{
if (huart->Init.WordLength == UART_WORDLENGTH_9B)
{
tmp = (uint16_t *) huart->pRxBuffPtr;
if (huart->Init.Parity == UART_PARITY_NONE)
{
*tmp = (uint16_t)(huart->Instance->DR & (uint16_t)0x01FF);
huart->pRxBuffPtr += 2U;
}
else
{
*tmp = (uint16_t)(huart->Instance->DR & (uint16_t)0x00FF);
huart->pRxBuffPtr += 1U;
}
}
else
{
if (huart->Init.Parity == UART_PARITY_NONE)
{
*huart->pRxBuffPtr++ = (uint8_t)(huart->Instance->DR & (uint8_t)0x00FF);
}
else
{
*huart->pRxBuffPtr++ = (uint8_t)(huart->Instance->DR & (uint8_t)0x007F);
}
}
if (--huart->RxXferCount == 0U)
{
/* 禁止UART数据寄存器不为空的中断 */
__HAL_UART_DISABLE_IT(huart, UART_IT_RXNE);
/* 禁用UART奇偶校验错误中断 */
__HAL_UART_DISABLE_IT(huart, UART_IT_PE);
/* 禁用UART错误中断:(帧错误,噪声错误,溢出错误) */
__HAL_UART_DISABLE_IT(huart, UART_IT_ERR);
/* Rx进程完成,将huart-> RxState还原为Ready */
huart->RxState = HAL_UART_STATE_READY;
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/* 调用注册的Rx完成回调函数 */
huart->RxCpltCallback(huart);
#else
/*调用旧版弱Rx完成回调函数*/
HAL_UART_RxCpltCallback(huart);
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
return HAL_OK;
}
return HAL_OK;
}
else
{
return HAL_BUSY;
}
}
二、使用方法
原理性的代码解析已经在前面一章节解析了,这一章节就是讲要如何实现,其他的都不难,重点是要知道 USE_HAL_UART_REGISTER_CALLBACKS 这个宏,其他的不懂的地方就可以根据这个线索来一步一步的追踪了。
图2.1 设置串口参数
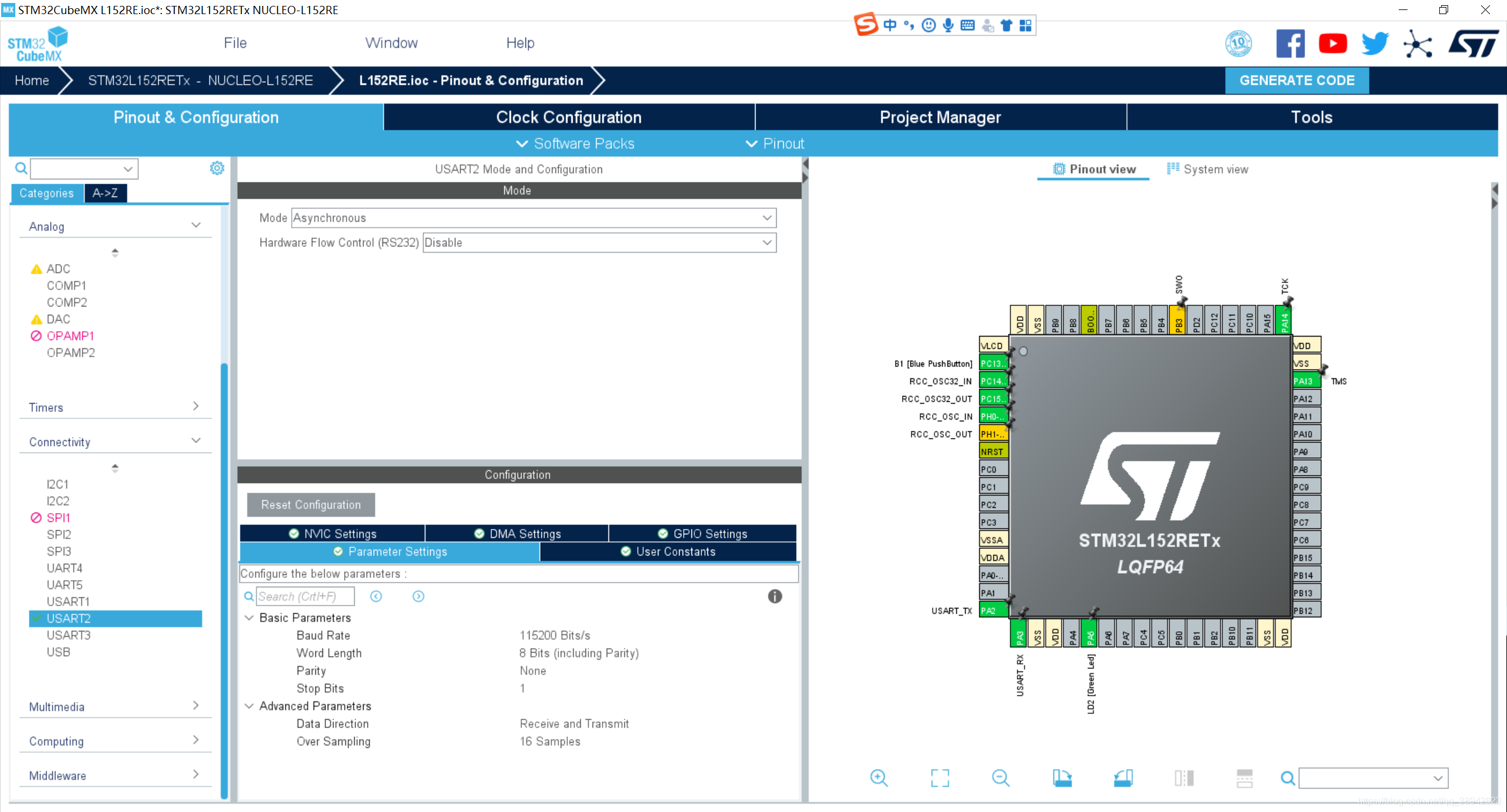
图2.2 使能串口中断并设置优先级
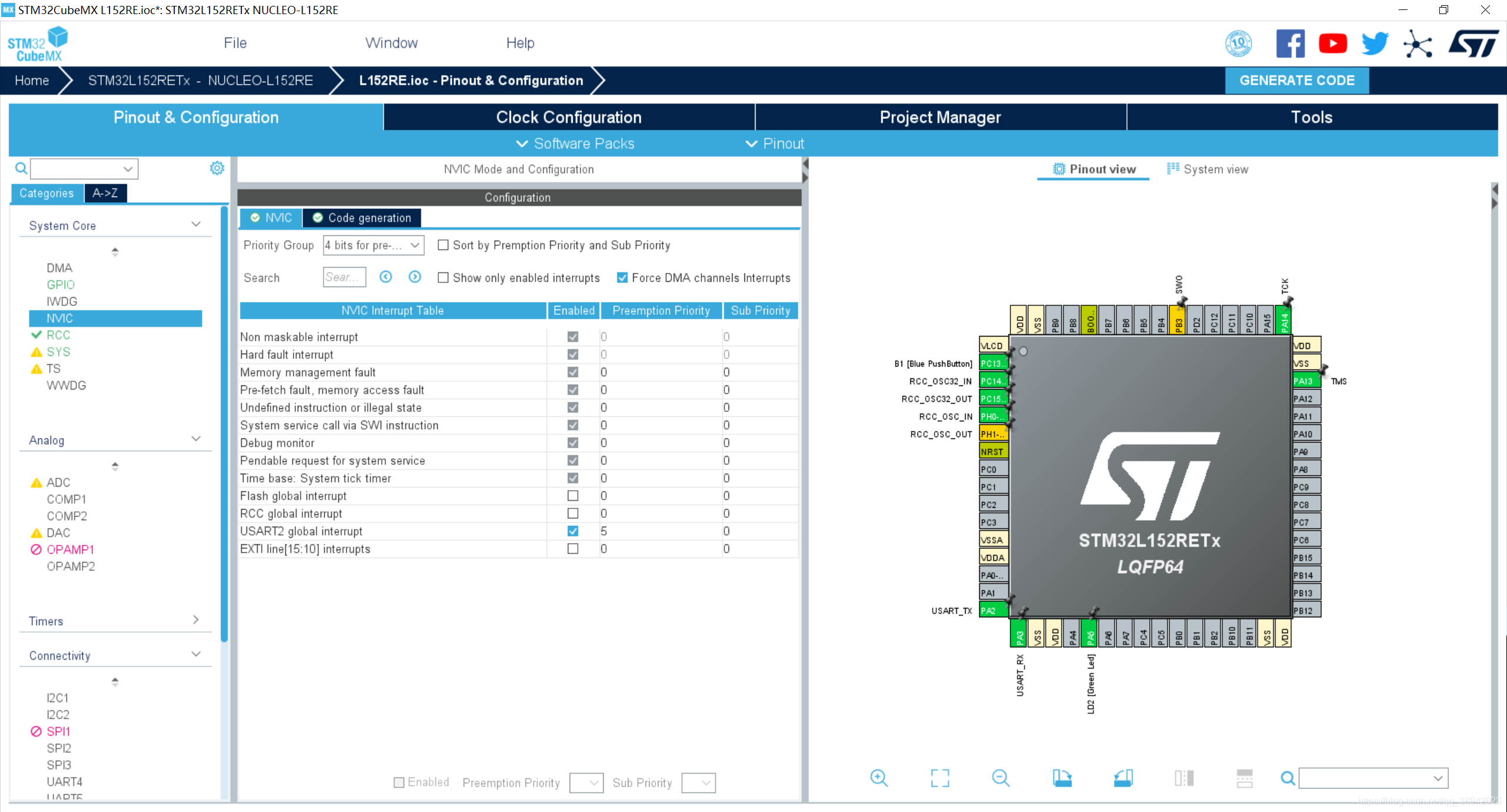
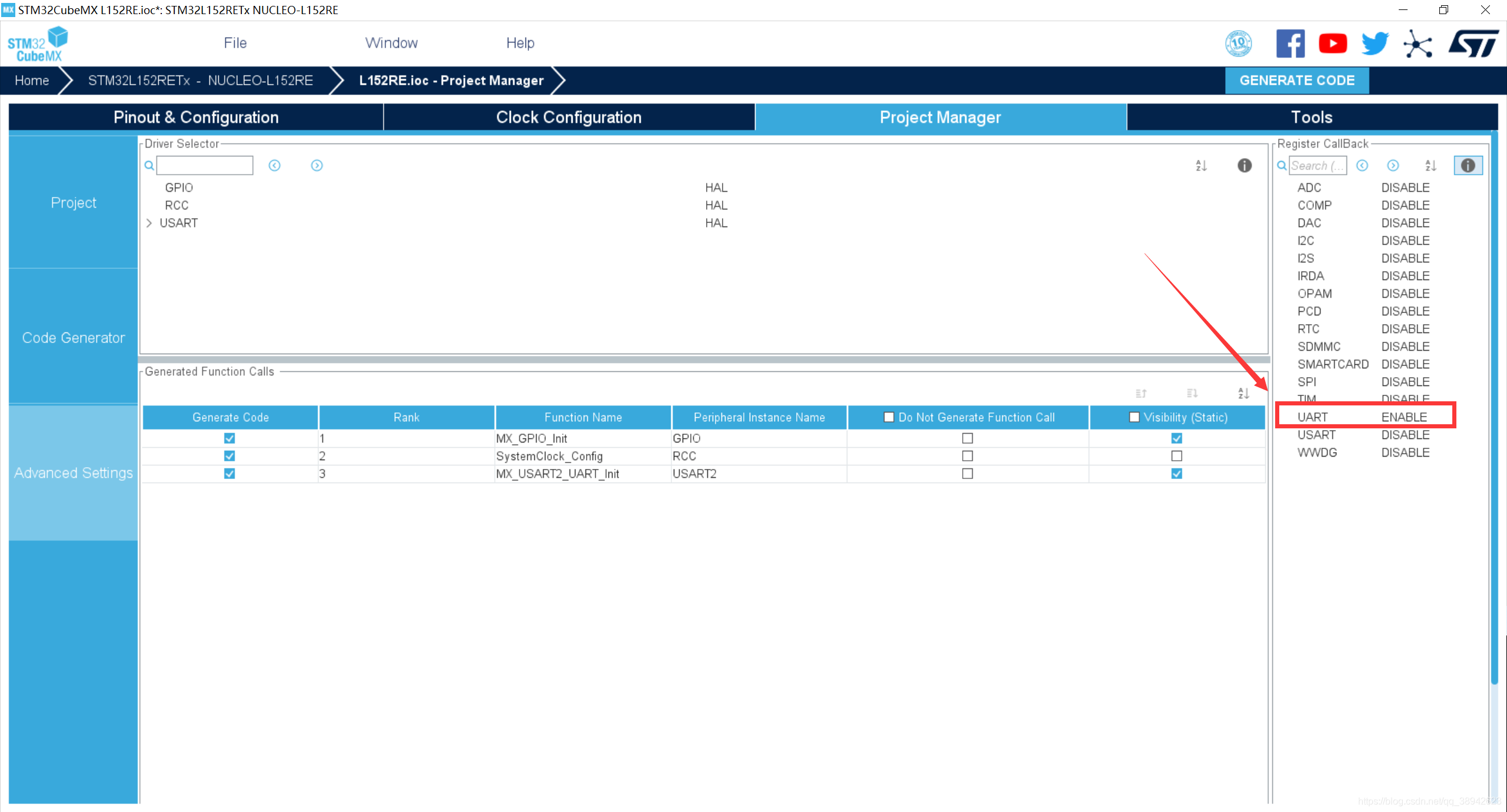
前两步都是设置串口中断的设置,按照常规来设置就可以了,重点了如何使能 USE_HAL_UART_REGISTER_CALLBACKS 这个宏,这个宏在 Project Manager 中的 Advanced Settings 右边的 Register Callback 中,选择 UART 为 ENABLE ,注意不是 USART,别选错了。
当然也可以在生成的项目中搜索 USE_HAL_UART_REGISTER_CALLBACKS 手工改成1,但是假如后续又通过STM32CubeMX修改配置的话,再生成代码,会将这里的配置覆盖过去,如果没注意这个点的就很容易出错,建议还是在这里修改比较稳妥一些。
代码生成之后,默认是没有打开串口中断的,通过 HAL_UART_RegisterCallback() 自定义回调函数,再开启中断就完成了我们的目的。
我们可以专门在一个.c文件来自定义接收完成的回调函数并打开中断,在main函数中调用这个初始化函数就可以了。这样就能和其他串口解耦,移植起来就很方便了。比如我需要指定一个串口来使用 Letter Shell( github上的开源项目,我的文章中也有这个教程),那么我就写一个 shell_port.c 文件,仅仅需要通过宏来指定使用shell 的串口句柄,其他的都不需要修改,直接添加这个 c文件,在main函数中使用 userShellInit() 来初始化,就能直接使用这个扩展模块了,相比于其他的方式,这个移植过程可以说是相当简便省事了(其他的形式需要在 usart.c 中定义串口接收的数组,再定义接收的个数,再在中断中移植自己的功能,再在main函数中打开串口中断,每建立一个新的项目都需要这么做,尤其时间长了之后,要配置串口中断的函数的时候就容易忘记函数名称,真的很烦)。
HAL_UART_RegisterCallback()
这个函数的第一个参数是 huart ,要配置的串口句柄。
这个函数的第二个参数是 CallbackID ,不同的外设所支持的回调函数ID不同,对于串口来说,HAL_UART_CallbackIDTypeDef 列出了所支持的各个功能ID,我们要在串口接收完成后调用我们自定义的ID,使用的就是 HAL_UART_RX_COMPLETE_CB_ID 。
这个函数的第三个参数是 pCallback ,我们自定义的回调函数,但是这个函数有要求,参照 pUART_CallbackTypeDef 的定义。返回应该是void,并且需要一个参数 UART_HandleTypeDef *huart。
typedef void (*pUART_CallbackTypeDef)(UART_HandleTypeDef *huart); // pointer to an UART callback function
注:这里设置的是每接收一个字节就触发中断,但是HAL库本身处理串口中断标志位后,会关闭中断,所以我们就需要 HAL_UART_Receive_IT 再次开启中断。
#include "shell_port.h"
#include "usart.h"
Shell shell;
char shellBuffer[512];
#define userShellhuart huart2 //shell 使用到的串口句柄
#define SHELL_UART_REC_LEN_ONCE 1 //串口单次接收的个数
uint8_t uartRecBuffer[SHELL_UART_REC_LEN_ONCE]; //串口接收的buffer
/**
* @brief 用户shell写
*
* @param data 数据
*/
void userShellWrite(char data)
{
HAL_UART_Transmit(&userShellhuart,(uint8_t *)&data, 1,1000);
}
/**
* @brief 用户shell读
*
* @param data 数据
* @return char 状态
*/
signed char userShellRead(char *data)
{
if(HAL_UART_Receive(&userShellhuart,(uint8_t *)data, 1, 0) == HAL_OK)
{
return 0;
}
else
{
return -1;
}
}
/**
* @brief 自定义函数串口接收完成中断 RxCpltCallback
*/
void ShellRxCpltCallback(UART_HandleTypeDef *huart)
{
shellHandler(&shell, uartRecBuffer[0]); //命令行处理函数
HAL_UART_Receive_IT(huart, (uint8_t *)uartRecBuffer, SHELL_UART_REC_LEN_ONCE);//使能串口中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量
}
/**
* @brief 注册串口接收中断到自己的自定义函数
*/
void ShellReceiveCallbackRemap(void)
{
HAL_UART_RegisterCallback(&userShellhuart,HAL_UART_RX_COMPLETE_CB_ID,ShellRxCpltCallback); //注册串口接收中断到自己的自定义函数
HAL_UART_Receive_IT(&userShellhuart, (uint8_t *)uartRecBuffer, SHELL_UART_REC_LEN_ONCE); //使能串口中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量
}
/**
* @brief 用户shell初始化
*
*/
void userShellInit(void)
{
shell.write = userShellWrite; //指定串口写入的函数
shell.read = userShellRead; //指定串口读取的函数
ShellReceiveCallbackRemap(); //注册串口接收中断到自己的自定义函数
shellInit(&shell, shellBuffer, 512);
}
代码很简单,只要看 shell_port.c 就可以了。
项目中使用到了 Letter Shell ,不懂的同学可以看下我的这篇文章。
STM32CubeMX Nucleo F767ZI 教程(3) 串口调试工具 Letter Shell


















 1222
1222

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









