









题目:
链接:剑指 Offer 68 - I. 二叉搜索树的最近公共祖先;LeetCode 235. 二叉搜索树的最近公共祖先
难度:中等
给定一个二叉搜索树, 找到该树中两个指定节点的最近公共祖先。
百度百科中最近公共祖先的定义为:“对于有根树 T 的两个结点 p、q,最近公共祖先表示为一个结点 x,满足 x 是 p、q 的祖先且 x 的深度尽可能大(一个节点也可以是它自己的祖先)。”
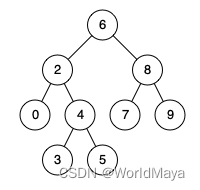
例如,给定如下二叉搜索树: root = [6,2,8,0,4,7,9,null,null,3,5]
示例 1:
输入: root = [6,2,8,0,4,7,9,null,null,3,5], p = 2, q = 8
输出: 6
解释: 节点 2 和节点 8 的最近公共祖先是 6。
示例 2:
输入: root = [6,2,8,0,4,7,9,null,null,3,5], p = 2, q = 4
输出: 2
解释: 节点 2 和节点 4 的最近公共祖先是 2, 因为根据定义最近公共祖先节点可以为节点本身。
说明:
- 所有节点的值都是唯一的。
- p、q 为不同节点且均存在于给定的二叉搜索树中。
方法一:
根据二叉搜索树性质遍历:
已知在二叉搜索树中,对于一个节点,小于其节点值的节点一定在其左子树中,大于其节点值的节点一定在其右子树中,可得自顶向下的遍历搜索方法:
-
我们从根节点开始遍历;
-
如果当前节点的值大于 p 和 q 的值,说明 p 和 q 应该在当前节点的左子树,因此将当前节点移动到它的左子节点;
-
如果当前节点的值小于 p 和 q 的值,说明 p 和 q 应该在当前节点的右子树,因此将当前节点移动到它的右子节点;
-
如果当前节点的值不满足上述两条要求,那么说明当前节点就是「分岔点」。此时,p 和 q 要么在当前节点的不同的子树中,要么其中一个就是当前节点。
代码一:
/**
* Definition for a binary tree node.
* struct TreeNode {
* int val;
* TreeNode *left;
* TreeNode *right;
* TreeNode(int x) : val(x), left(NULL), right(NULL) {}
* };
*/
class Solution {
public:
TreeNode* lowestCommonAncestor(TreeNode* root, TreeNode* p, TreeNode* q) {
TreeNode* ans = root;
while(true) {
if(ans->val > p->val && ans->val > q->val) ans = ans->left;
else if(ans->val < p->val && ans->val < q->val) ans = ans->right;
else break;
}
return ans;
}
};
最坏时间复杂度O(N),在二叉搜索树退化为链表时取得。
空间复杂度O(1)。
方法二:
搜索与回溯:
这个思路比较复杂,不考虑二叉搜索树的数值排序性质,直接找 p、q 节点,类似于后序遍历。用一个节点指针 *ans 记录找到的最近公共祖先。对于递归过程中的每个节点,先搜索它的左右子树中有没有 p 和 q ,在搜索左右子树的过程中,如果找到了 p 或 q ,会将 p 或 q 层层回溯传递,而如果已经找到了最近公共祖先ans,则直接将ans回溯传递;然后开始条件判断,如果已经在左右子树的搜索过程中找到了ans,那么直接回溯传递ans,如果root、左子树返回值 l 、右子树返回值 r 中有两个节点分别等于 p 和 q ,说明当前 root 就是最近公共祖先,赋值给 ans 并返回,如果root、l、r 中只有一个等于 p 或 q,则将这个节点回溯传递给上层判断,如果没找到 p 或 q 直接返回空值。
代码二:
/**
* Definition for a binary tree node.
* struct TreeNode {
* int val;
* TreeNode *left;
* TreeNode *right;
* TreeNode(int x) : val(x), left(NULL), right(NULL) {}
* };
*/
class Solution {
private:
TreeNode *ans = nullptr; // 最近公共祖先
public:
TreeNode* lowestCommonAncestor(TreeNode* root, TreeNode* p, TreeNode* q) {
if(root == nullptr) return nullptr;
// 搜索左右子树
TreeNode* l = lowestCommonAncestor(root->left, p, q);
TreeNode* r = lowestCommonAncestor(root->right, p, q);
// 条件判断
if(ans != nullptr) return ans;
bool pFound = (root == p || l == p || r == p);
bool qFound = (root == q || l == q || r == q);
if(pFound == true && qFound == true) {
ans = root;
return ans;
}
if(pFound == true) return p;
if(qFound == true) return q;
return nullptr;
}
};
时间复杂度O(N)。
空间复杂度O(N),取决于递归栈空间,在二叉搜索树退化为链表时取得。















 1062
1062











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









