









【嵌入式C】数据的大小端存储与数据格式转换
以Cortex-M内核为例,实际应用中大部分内核都是 **小端 **存储,以STM32为例,全部都是小端,而且是芯片设计之初就固化进去的,不可修改。
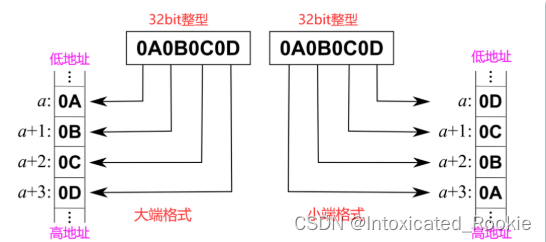
1. 大小端存储格式图解
通俗的将:
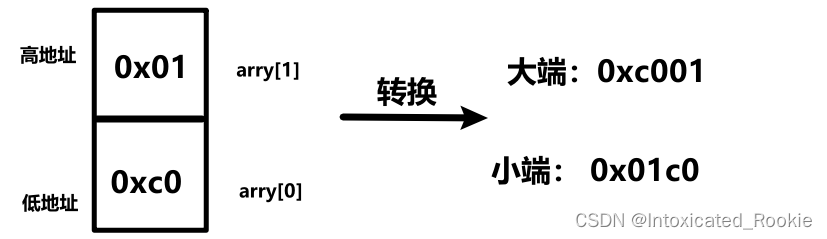
- 大端:低字节存储在高地址,高字节存储在低地址
- 小端:低字节存储在低地址,高字节存储在高地址 低低,高高
2. 数据类型转换函数
u8 数组与 u16 数值的转换
2.1 u8数组转u16
// uModeFlag: 1 big-endian 0: little-endian
uint16_t u8Arry2u16(uint8_t *pBuffer, uint8_t uModeFlag)
{
uint16_t uShort = 0;
uShort = *pBuffer++;
if(1 == uModeFlag){
uShort = (uShort << 8) | (*pBuffer);
}else if(0 == uModeFlag){
uShort |= (*pBuffer) << 8;
}
return uShort;
}
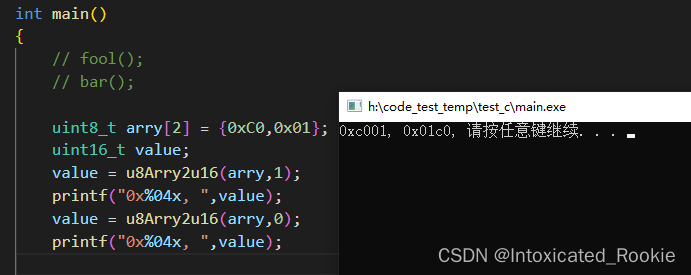
// 测试
uint8_t arry[2] = {0xC0,0x01};
uint16_t value;
value = u8Arry2u16(arry,1); // 大端,输出 0xC001
printf("0x%04x, ",value);
value = u8Arry2u16(arry,0); // 小端,输出 0x01c0
printf("0x%04x, ",value);
2.2 u16数转u8数组
// uModeFlag: 1 big-endian 0: little-endian
void u16_to_u8_Arry(uint16_t srcdata,uint8_t *destdata,uint8_t uModeFlag)
{
switch (uModeFlag)
{
case 1:{
*(destdata) = (uint8_t)(srcdata >>8 & 0xFF);
*(destdata +1) = (uint8_t)(srcdata & 0xFF);
break;
}
case 0:{
*(destdata+1) = (uint8_t)(srcdata >>8 & 0xFF); //
*destdata = (uint8_t)(srcdata & 0xFF); //
break;
}
default:
break;
}
}
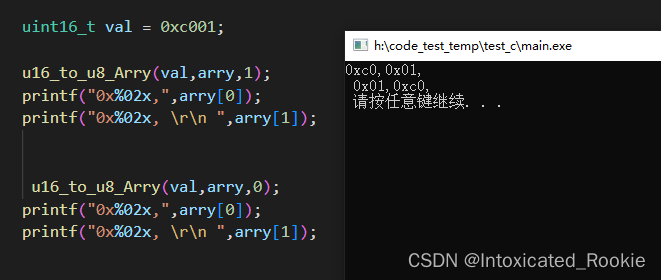
// 测试
uint16_t val = 0xc001;
u16_to_u8_Arry(val,arry,1);
printf("0x%02x,",arry[0]);
printf("0x%02x, \r\n ",arry[1]); // 0xc0 0x01
u16_to_u8_Arry(val,arry,0);
printf("0x%02x,",arry[0]);
printf("0x%02x, \r\n ",arry[1]); // 0x01,0xc0
















 2590
2590











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











