







SAO原理:
SAO是在DB之后进行, 输入是重建帧和原始帧数据, 输出是SAO数据和SAO后的重建帧. 自适应样点补偿是一个自适应选择过程,在去块滤波后进行。
SAO应用于去方块滤波之后,首先将Frame划分成若干个LCU,SAO对处于不同图像区域的LCU进行局部信息补偿,以减少源图像与重构图像之间的失真。HEVC中根本上说只有两种SAO类型:边缘补偿(EO,Edge Offset),带状补偿(BO,Band Offset),在实际操作过程中还引入了参数融合模式(Merge)

首先把Frame划分为若干LCU(logic coding unit类似 ctu), 然后对每个LCU中每个像素进行SAO操作.将根据其LCU像素特征选择一种像素补偿方式,以减少源图像与重构图像之间的失真。自适应样点补偿方式分为带状补偿(Band Offset,BO)和边缘补偿(Edge Offset,EO)两大类。
带状补偿将像素值强度等级划分为若干个条带,每个条带内的像素拥有相同的补偿值。进行补偿时根据重构像素点所处的条带,选择相应的带状补偿值进行补偿。
边界补偿(EO):边界补偿模式是通过比较当前像素值与相邻像素值的大小进行分类,然后根据类别对属于同一类别的像素值补偿相同的数值。
边界补偿具体可分为四种模式,分别是:水平方向(E0_0)、垂直方向(E0_1)、135°方向(E0_2)和45°方向(E0_3)。如下图所示:


SAO意义:大量模拟测试和资料显示, SAO平均可以节约2%到6%的码率, 而编解码的复杂度只增加2%左右!SAO主要目的和操作原理减少源图像与重构图像之间的失真。如果只看这点,实际上每帧编码后的码率反而会增加,因为多了SAO的相关语法和语义以及补偿值的编码!其实不然,虽然当前帧的码率增加了几个字节或者几个bit, 但是这点增加码字使得源图像与重构图像的失真减少,使接下来的预测残差更小了,从而大大的降低码率了!
解读参考 HEVC中SAO--自适应样点补偿 详细分析解读_循环是人递归是神的博客-CSDN博客
名词解释参考https://blog.csdn.net/kuan__/article/details/125951773
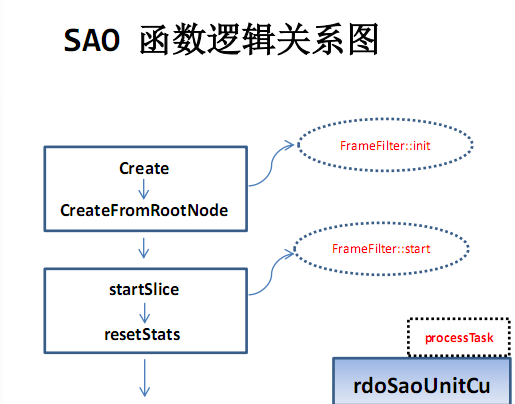
代码流程参考x265源码分析:SAO 函数总结及逻辑关系图_nk_wavelet的博客-CSDN博客
代码参考 x265源码分析:sao.cpp 自适应样点补偿_nk_wavelet的博客-CSDN博客
/* 对|num / den|四舍五入,然后前面添加符号 */
inline int32_t roundIBDI(int32_t num, int32_t den)
{
return num >= 0 ? ((num * 2 + den)/(den * 2)) : -((-num * 2 + den)/(den * 2));
}
/* 获取输入变量x的符号 */
inline int8_t signOf(int x)
{
return (x >> 31) | ((int)((((uint32_t)-x)) >> 31));
}
/* a等于b返回0, a小于b就返回-1,a大于b就返回1 */
inline int signOf2(const int a, const int b)
{
int r = 0;
if (a < b) r = -1;
if (a > b) r = 1;
return r;
}
/**
* @brief 计算D_post和 D_pre的差值,其中D_pre和D_post分别表示原始像素与重构像素(SAO补偿前、补偿后)之间的失真。
* @param count : 一个CTB内某个特定SAO类型样本的个数
* @param offset : 一个CTB内某个特定SAO类型样本的补偿值
* @param offsetOrg : 原始像素与重构像素(SAO补偿前)之间的差值之和
*/
inline int64_t estSaoDist(int32_t count, int32_t offset, int32_t offsetOrg)
{
return (count * offset - offsetOrg * 2) * offset;
}
/**
* @brief 边界补偿模式下像素的5种分类 :
* 第1类谷点和第2类凹拐点,需要加上一个正补偿值;
* 第4类峰点和第3类凸拐点,需要加上一个负补偿值;
* 第0类像素不进行补偿。
*/
const uint32_t SAO::s_eoTable[NUM_EDGETYPE] =
{
1, // 0
2, // 1
0, // 2
3, // 3
4 // 4
};
/**
* @brief 创建SAO的部分参数
*/
bool SAO::create(x265_param* param, int initCommon)
{
m_param = param; // 编码器参数集
m_chromaFormat = param->internalCsp; // 内部图像颜色空间,此处只考虑 I420
// 色度水平和垂直方向移动的位数,对于I420格式的图像,此处都是1
m_hChromaShift = CHROMA_H_SHIFT(param->internalCsp);
m_vChromaShift = CHROMA_V_SHIFT(param->internalCsp);
// 计算水平和垂直方向CU(编码单元)的个数,长度不足 g_maxCUSize 也算一个;
// maxCUSize 表示CU的最大尺寸,此处取值为 64.
m_numCuInWidth = (m_param->sourceWidth + g_maxCUSize - 1) / g_maxCUSize;
m_numCuInHeight = (m_param->sourceHeight + g_maxCUSize - 1) / g_maxCUSize;
// maxY表示亮度的最大值,对于8位深度的图像来说,该最大值为255;
// rangeExt 扩展范围为最大值的一半,此处为127;
// numCtu 表示一帧中 CU (编码单元)的个数.
const pixel maxY = (1 << X265_DEPTH) - 1;
const pixel rangeExt = maxY >> 1;
int numCtu = m_numCuInWidth * m_numCuInHeight;
// 为当前CU的左边和上面CU申请空间,备份左边和上面CU主要用于预测当前CU;
for (int i = 0; i < (param->internalCsp != X265_CSP_I400 ? 3 : 1); i++)
{
CHECKED_MALLOC(m_tmpL1[i], pixel, g_maxCUSize + 1);
CHECKED_MALLOC(m_tmpL2[i], pixel, g_maxCUSize + 1);
// SAO asm code will read 1 pixel before and after, so pad by 2
// NOTE: m_param->sourceWidth+2 enough, to avoid condition check in
// copySaoAboveRef(), I alloc more up to 63 bytes in here
CHECKED_MALLOC(m_tmpU[i], pixel, m_numCuInWidth * g_maxCUSize + 2 + 32);
m_tmpU[i] += 1;
}
if (initCommon)
{
// 选择SAO方法处理去方块边界像素,如果开启则处理所有边界像素,
// 关闭则不处理右边和下面边界的像素;缺省是关闭。
if (m_param->bSaoNonDeblocked)
{
CHECKED_MALLOC(m_countPreDblk, PerPlane, numCtu);
CHECKED_MALLOC(m_offsetOrgPreDblk, PerPlane, numCtu);
}
CHECKED_MALLOC(m_depthSaoRate, double, 2 * SAO_DEPTHRATE_SIZE);
m_depthSaoRate[0 * SAO_DEPTHRATE_SIZE + 0] = 0;
m_depthSaoRate[0 * SAO_DEPTHRATE_SIZE + 1] = 0;
m_depthSaoRate[0 * SAO_DEPTHRATE_SIZE + 2] = 0;
m_depthSaoRate[0 * SAO_DEPTHRATE_SIZE + 3] = 0;
m_depthSaoRate[1 * SAO_DEPTHRATE_SIZE + 0] = 0;
m_depthSaoRate[1 * SAO_DEPTHRATE_SIZE + 1] = 0;
m_depthSaoRate[1 * SAO_DEPTHRATE_SIZE + 2] = 0;
m_depthSaoRate[1 * SAO_DEPTHRATE_SIZE + 3] = 0;
CHECKED_MALLOC(m_clipTableBase, pixel, maxY + 2 * rangeExt);
m_clipTable = &(m_clipTableBase[rangeExt]);
// 创建一个快速查找表m_clipTable(用于补偿,限制越界),即:
// {0, 0, ..., 0 (127个); 0, 1, 2, ..., 255; 255, 255, ..., 255(127个)}
for (int i = 0; i < rangeExt; i++)
m_clipTableBase[i] = 0;
for (int i = 0; i < maxY; i++)
m_clipTable[i] = (pixel)i;
for (int i = maxY; i < maxY + rangeExt; i++)
m_clipTable[i] = maxY;
}
else
{
// must initialize these common pointer outside of function
m_countPreDblk = NULL;
m_offsetOrgPreDblk = NULL;
m_clipTableBase = NULL;
m_clipTable = NULL;
}
return true;
fail:
return false;
}
/* 为当前CTU的SAO参数分配空间并初始化 */
void SAO::allocSaoParam(SAOParam* saoParam) const
{
int planes = (m_param->internalCsp != X265_CSP_I400) ? 3 : 1;
saoParam->numCuInWidth = m_numCuInWidth;
for (int i = 0; i < planes; i++)
saoParam->ctuParam[i] = new SaoCtuParam[m_numCuInHeight * m_numCuInWidth];
}
/**
* @brief 根据SAO补偿模式对重构像素值进行补偿.
* @param addr : 从上到下、从左到右,当前CTU的序号
* @param typeIdx : SAO补偿模式,取值SAO_EO_X 或 SAO_BO
* @param plane : 颜色空间平面的序号,亮度平面为0,两个色度平面分别为1和2.
*/
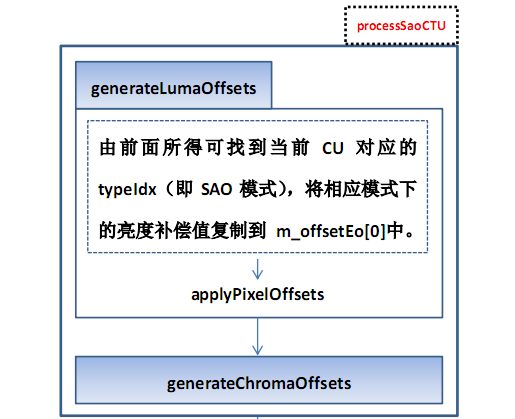
void SAO::applyPixelOffsets(int addr, int typeIdx, int plane)
{
// reconPic为YUV重构图像,rec为当面颜色平面当前CTU的在重构图像中起始地址
PicYuv* reconPic = m_frame->m_reconPic;
pixel* rec = reconPic->getPlaneAddr(plane, addr);
// 获取重构图像颜色平面对应的跨度,亮度和色度的跨度不一样
intptr_t stride = plane ? reconPic->m_strideC : reconPic->m_stride;
uint32_t picWidth = m_param->sourceWidth; // 原始图像的宽
uint32_t picHeight = m_param->sourceHeight; // 原始图像的高
const CUData* cu = m_frame->m_encData->getPicCTU(addr);
int ctuWidth = g_maxCUSize; // 当前CU的宽度
int ctuHeight = g_maxCUSize; // 当前CU的高度
// 当前CU最左边的横坐标和最上面的纵坐标
uint32_t lpelx = cu->m_cuPelX;
uint32_t tpely = cu->m_cuPelY;
// 如果是色度平面,相应的宽度和高度都要减半,即左移一位
if (plane)
{
picWidth >>= m_hChromaShift;
picHeight >>= m_vChromaShift;
ctuWidth >>= m_hChromaShift;
ctuHeight >>= m_vChromaShift;
lpelx >>= m_hChromaShift;
tpely >>= m_vChromaShift;
}
// 获取当前CU最右边和最下面的边界值,不超出原始图像的最右边和最下面
uint32_t rpelx = x265_min(lpelx + ctuWidth, picWidth);
uint32_t bpely = x265_min(tpely + ctuHeight, picHeight);
// 当前CU实际的宽度和高度,除了最右边和最下面的CU外,其他都是64x64
ctuWidth = rpelx - lpelx;
ctuHeight = bpely - tpely;
int8_t _upBuff1[MAX_CU_SIZE + 2], *upBuff1 = _upBuff1 + 1, signLeft1[2];
int8_t _upBufft[MAX_CU_SIZE + 2], *upBufft = _upBufft + 1;
memset(_upBuff1 + MAX_CU_SIZE, 0, 2 * sizeof(int8_t));
pixel* tmpL = m_tmpL1[plane];
pixel* tmpU = &(m_tmpU[plane][lpelx]);
int8_t* offsetEo = m_offsetEo[plane];
// 根据边界或边带类型进行相应的SAO补偿
switch (typeIdx)
{
case SAO_EO_0: // dir: -
{... ...}
case SAO_EO_1: // dir: |
{... ...}
case SAO_EO_2: // dir: 135
{... ...}
case SAO_EO_3: // dir: 45
{... ...}
case SAO_BO: // 边带补偿
{... ...}
default: break;
}
}
/* 生成亮度CTU的各种模式下的SAO补偿值并进行补偿 */
void SAO::generateLumaOffsets(SaoCtuParam* ctuParam, int idxY, int idxX)
{
PicYuv* reconPic = m_frame->m_reconPic;
intptr_t stride = reconPic->m_stride;
int ctuWidth = g_maxCUSize;
int ctuHeight = g_maxCUSize;
// 根据idxX和idxY得到CTU的序号,再根据序号获取CTU在重构图像缓冲区中起始位置
int addr = idxY * m_numCuInWidth + idxX;
pixel* rec = reconPic->getLumaAddr(addr);
// 如果是水平方向第一个CTU,则用m_tmpL1[0]保存CTU左边一列(即左边CTU最右边的一列,
// 不属于该CTU)的重构值
if (idxX == 0)
{
for (int i = 0; i < ctuHeight + 1; i++)
{
m_tmpL1[0][i] = rec[0];
rec += stride;
}
}
// 判断当前CTU是否与左边CTU的SAO模式一样
bool mergeLeftFlag = (ctuParam[addr].mergeMode == SAO_MERGE_LEFT);
int typeIdx = ctuParam[addr].typeIdx;
// 当前CTU不是水平方向的最后一个CTU,则用m_tmpL2[0]来保存当前CTU最右边的一列
//(属于该CTU)重构值,后续跟m_tmpL1[0]交换可以用于下一个CTU的SAO模式计算
if (idxX != (m_numCuInWidth - 1))
{
rec = reconPic->getLumaAddr(addr);
for (int i = 0; i < ctuHeight + 1; i++)
{
m_tmpL2[0][i] = rec[ctuWidth - 1];
rec += stride;
}
}
// SAO补偿模式总共五种,取值0 – 4.
if (typeIdx >= 0)
{
// 如果跟左边的CTU相同的SAO模式,则 m_offsetEo 直接采用左边CTU的值
if (!mergeLeftFlag)
{
if (typeIdx == SAO_BO)
{
memset(m_offsetBo[0], 0, sizeof(m_offsetBo[0]));
for (int i = 0; i < SAO_NUM_OFFSET; i++)
m_offsetBo[0][((ctuParam[addr].bandPos + i) & (MAX_NUM_SAO_CLASS - 1))] =
(int8_t)(ctuParam[addr].offset[i] << SAO_BIT_INC);
}
else // 边界补偿,即SAO_EO_X, X = 0,1,2,3
{
int offset[NUM_EDGETYPE];
offset[0] = 0;
for (int i = 0; i < SAO_NUM_OFFSET; i++)
offset[i + 1] = ctuParam[addr].offset[i] << SAO_BIT_INC;
for (int edgeType = 0; edgeType < NUM_EDGETYPE; edgeType++)
m_offsetEo[0][edgeType] = (int8_t)offset[s_eoTable[edgeType]];
}
}
// m_offsetEo[0]保存了亮度平面各种边界或边带需要补偿的值,将该值用到SAO补偿中
applyPixelOffsets(addr, typeIdx, 0);
}
// 交换m_tmpL1[0]与m_tmpL2[0],就得到下一个CTU左边一列的重构值,即:m_tmpL1[0]
std::swap(m_tmpL1[0], m_tmpL2[0]);
}
/* 生成色度CTU的各种模式下的SAO补偿值并进行补偿*/
void SAO::generateChromaOffsets(SaoCtuParam* ctuParam[3], int idxY, int idxX);
/* 统计当前CTU在BO和EO各模式下的像素归类,包括重构像素与原始像素差值之和,以及对classIdx的计数 */
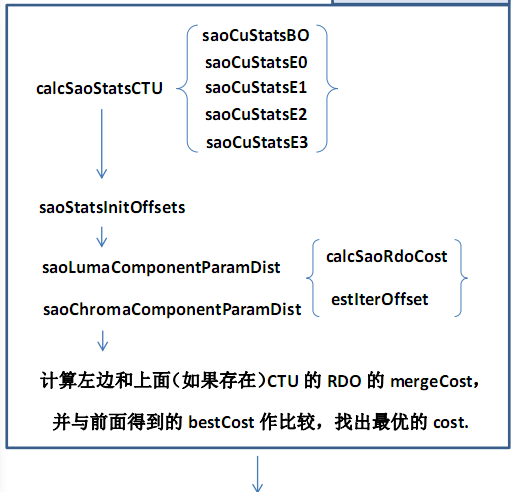
void SAO::calcSaoStatsCTU(int addr, int plane)
{
const PicYuv* reconPic = m_frame->m_reconPic;
const CUData* cu = m_frame->m_encData->getPicCTU(addr);
const pixel* fenc0 = m_frame->m_fencPic->getPlaneAddr(plane, addr);
const pixel* rec0 = reconPic->getPlaneAddr(plane, addr);
const pixel* fenc;
const pixel* rec;
// 亮度和色度平面的跨度不一样,plane为0表示亮度,非0表示色度
intptr_t stride = plane ? reconPic->m_strideC : reconPic->m_stride;
uint32_t picWidth = m_param->sourceWidth;
uint32_t picHeight = m_param->sourceHeight;
int ctuWidth = g_maxCUSize;
int ctuHeight = g_maxCUSize;
uint32_t lpelx = cu->m_cuPelX; // 当前CTU最左边像素的横坐标
uint32_t tpely = cu->m_cuPelY; // 当前CTU最上面像素的纵坐标
// 色度平面,相应的值都要减半,即左移一位
if (plane)
{
picWidth >>= m_hChromaShift;
picHeight >>= m_vChromaShift;
ctuWidth >>= m_hChromaShift;
ctuHeight >>= m_vChromaShift;
lpelx >>= m_hChromaShift;
tpely >>= m_vChromaShift;
}
// 当前CTU最右边像素的横坐标、最下面像素的纵坐标
uint32_t rpelx = x265_min(lpelx + ctuWidth, picWidth);
uint32_t bpely = x265_min(tpely + ctuHeight, picHeight);
// 当前CTU实际的宽度和高度,除了最右边和最下面的CTU外,其他CTU一般都是64x64
ctuWidth = rpelx - lpelx;
ctuHeight = bpely - tpely;
int startX, startY, endX, endY;
const int plane_offset = plane ? 2 : 0;
int skipB = 4, skipR = 5;
int8_t _upBuff[2 * (MAX_CU_SIZE + 16 + 16)], *upBuff1 = _upBuff + 16,
*upBufft = upBuff1 +(MAX_CU_SIZE + 16 + 16);
ALIGN_VAR_32(int16_t, diff[MAX_CU_SIZE * MAX_CU_SIZE]);
// 计算 (fenc - frec),结果放入diff中,即原始像素与重构像素间的失真
if ((lpelx + ctuWidth < picWidth) & (tpely + ctuHeight < picHeight))
{
// WARNING: *) May read beyond bound on video than ctuWidth or
// ctuHeight is NOT multiple of cuSize
X265_CHECK((ctuWidth == ctuHeight) || (m_chromaFormat != X265_CSP_I420),
"video size check failure\n");
// 对于square的CU可以采用SIMD流指令计算(fenc - frec),
// 此处 MAX_CU_SIZE = 64 可以看作 diff的跨度,fenc0和rec0的跨度都是stride
if (plane)
primitives.chroma[m_chromaFormat].cu[g_maxLog2CUSize - 2].
sub_ps(diff, MAX_CU_SIZE, fenc0, rec0, stride, stride);
else
primitives.cu[g_maxLog2CUSize - 2].sub_ps(diff, MAX_CU_SIZE, fenc0, rec0, stride, stride);
}
else
{
// path for non-square area (most in edge)
// 最右边或最下面的CTU可能不是square,另外单独计算 (fenc - frec)
for(int y = 0; y < ctuHeight; y++)
{
for(int x = 0; x < ctuWidth; x++)
{
diff[y * MAX_CU_SIZE + x] = (fenc0[y * stride + x] – rec0[y * stride + x]);
}
}
}
// SAO_BO:
{
// 缺省是disable,表示右边和底部边界不做去方块滤波
if (m_param->bSaoNonDeblocked)
{
skipB = 3;
skipR = 4;
}
endX = (rpelx == picWidth) ? ctuWidth : ctuWidth - skipR + plane_offset;
endY = (bpely == picHeight) ? ctuHeight : ctuHeight - skipB + plane_offset;
// 当前CTU按照BO补偿模式对像素进行归类,
// 包括每个条带像素个数、原始像素与重构像素差值之和
primitives.saoCuStatsBO(diff, rec0, stride, endX, endY,
m_offsetOrg[plane][SAO_BO], m_count[plane][SAO_BO]);
}
// SAO_EO_0: // dir: -
{
if (m_param->bSaoNonDeblocked) // 缺省是disable, 忽略
{
skipB = 3;
skipR = 5;
}
startX = !lpelx;
endX = (rpelx == picWidth) ? ctuWidth - 1 : ctuWidth - skipR + plane_offset;
// 当前CTU按照 EO_0 模式对像素进行归类
primitives.saoCuStatsE0(diff + startX, rec0 + startX, stride, endX - startX, ctuHeight - skipB +
plane_offset, m_offsetOrg[plane][SAO_EO_0], m_count[plane][SAO_EO_0]);
}
// SAO_EO_1: // dir: |
{
if (m_param->bSaoNonDeblocked) // 缺省是disable, 忽略
{
skipB = 4;
skipR = 4;
}
rec = rec0;
// 如果tpely = 0,就表示当前CTU位于最上方,因此从CTU的第二行开始进行统计
startY = !tpely;
endX = (rpelx == picWidth) ? ctuWidth : ctuWidth - skipR + plane_offset;
endY = (bpely == picHeight) ? ctuHeight - 1 : ctuHeight - skipB + plane_offset;
if (!tpely)
rec += stride; // 当前CTU第二行起始地址,为下面的sign计算做准备
// 计算当前CTU第二行与第一行的像素差值,保存在 upBuff1 中
primitives.sign(upBuff1, rec, &rec[- stride], ctuWidth);
// 当前CTU按照 EO_1 模式对像素进行归类
primitives.saoCuStatsE1(diff + startY * MAX_CU_SIZE, rec0 + startY * stride, stride, upBuff1,
endX, endY - startY, m_offsetOrg[plane][SAO_EO_1], m_count[plane][SAO_EO_1]);
}
// SAO_EO_2: // dir: 135
{
if (m_param->bSaoNonDeblocked) // 缺省是disable, 忽略
{
skipB = 4;
skipR = 5;
}
fenc = fenc0;
rec = rec0;
// 要计算某个像素与左上方像素(即135度方向)的差值,要确保左上方像素存在,
// 因此如果CTU位于图像的最左边或最上方,startX、startY需为1
startX = !lpelx;
endX = (rpelx == picWidth) ? ctuWidth - 1 : ctuWidth - skipR + plane_offset;
startY = !tpely;
endY = (bpely == picHeight) ? ctuHeight - 1 : ctuHeight - skipB + plane_offset;
if (!tpely)
{
fenc += stride; // 原始图像第二行起始地址
rec += stride; // 当前CTU第二行起始地址,为下面的sign计算做准备
}
// 计算当前CTU第二行与第一行的像素差值(即与左上方像素的差值),保存在 upBuff1 中
primitives.sign(upBuff1, &rec[startX], &rec[startX - stride - 1], (endX - startX));
// 当前CTU按照 EO_2 模式对像素进行归类
primitives.saoCuStatsE2(diff + startX + startY * MAX_CU_SIZE, rec0 + startX + startY * stride,
stride, upBuff1, upBufft, endX - startX, endY - startY,
m_offsetOrg[plane][SAO_EO_2], m_count[plane][SAO_EO_2]);
}
// SAO_EO_3: // dir: 45
{
if (m_param->bSaoNonDeblocked) // 缺省是disable, 忽略
{
skipB = 4;
skipR = 5;
}
fenc = fenc0;
rec = rec0;
startX = !lpelx;
endX = (rpelx == picWidth) ? ctuWidth - 1 : ctuWidth - skipR + plane_offset;
startY = !tpely;
endY = (bpely == picHeight) ? ctuHeight - 1 : ctuHeight - skipB + plane_offset;
if (!tpely)
{
fenc += stride; // 原始图像第二行起始地址
rec += stride; // 当前CTU第二行起始地址,为下面的sign计算做准备
}
// 计算当前CTU第二行与第一行的像素差值(即与右上方像素的差值),保存在 upBuff1 中
primitives.sign(upBuff1, &rec[startX - 1], &rec[startX - 1 - stride + 1],(endX - startX + 1));
// 当前CTU按照 EO_3 模式对像素进行归类
primitives.saoCuStatsE3(diff + startX + startY * MAX_CU_SIZE, rec0 + startX + startY * stride,
stride, upBuff1 + 1, endX - startX, endY - startY,
m_offsetOrg[plane][SAO_EO_3], m_count[plane][SAO_EO_3]);
}
}
/* 去方块滤波前对CTU的像素统计归类,只有当SAO和bSaoNonDeblocked都开启的情况下才使用,因此暂时忽略 */
void SAO::calcSaoStatsCu_BeforeDblk(Frame* frame, int idxX, int idxY);
/* 计算CTU在各种模式下的最优SAO代价,与直接采用左边或上面CTU的SAO参数作比较,找出最优的SAO代价,
并将最优SAO模式下的各种参数保存在 saoParam->ctuParam[plane][add]中 */
void SAO::rdoSaoUnitCu(SAOParam* saoParam, int rowBaseAddr, int idxX, int addr)
{
Slice* slice = m_frame->m_encData->m_slice;
const CUData* cu = m_frame->m_encData->getPicCTU(addr);
int qp = cu->m_qp[0];
int64_t lambda[2] = { 0 };
int qpCb = qp;
// 色度量化因子qpCb
if (m_param->internalCsp == X265_CSP_I420)
qpCb = x265_clip3(QP_MIN, QP_MAX_MAX, (int)g_chromaScale[qp + slice->m_pps->chromaQpOffset[0]]);
else
qpCb = X265_MIN(qp + slice->m_pps->chromaQpOffset[0], QP_MAX_SPEC);
// lambda[0]用于亮度SAO参数计算,lambda[1]用于色度SAO参数计算
lambda[0] = (int64_t)floor(256.0 * x265_lambda2_tab[qp]);
lambda[1] = (int64_t)floor(256.0 * x265_lambda2_tab[qpCb]);
// 左边和上面的CU是否存在
const bool allowMerge[2] = {(idxX != 0), (rowBaseAddr != 0)};
// 左边和上面的CU的编号
const int addrMerge[2] = {(idxX ? addr - 1 : -1), (rowBaseAddr ? addr - m_numCuInWidth : -1)};
// 是否存在色度平面
bool chroma = m_param->internalCsp != X265_CSP_I400 &&
m_frame->m_fencPic->m_picCsp != X265_CSP_I400;
// 我们只考虑I420格式,因此存在色度平面,因此此处planes取值3
int planes = chroma ? 3 : 1;
// 选择SAO方法处理去方块边界像素,如果开启则处理所有边界像素,
// 关闭则不处理右边和下面边界的像素;缺省是关闭。
if (m_param->bSaoNonDeblocked)
{
memcpy(m_count, m_countPreDblk[addr], sizeof(m_count));
memcpy(m_offsetOrg, m_offsetOrgPreDblk[addr], sizeof(m_offsetOrg));
}
else
{ // 初始化各模式各类型点的个数和失真值为0
memset(m_count, 0, sizeof(m_count));
memset(m_offsetOrg, 0, sizeof(m_offsetOrg));
}
for (int i = 0; i < planes; i++)
saoParam->ctuParam[i][addr].reset();
// 统计当前CTU的亮度块在BO和EO各模式下的像素归类,
// 包括重构像素与原始像素差值之和,以及对classIdx的计数
if (saoParam->bSaoFlag[0])
calcSaoStatsCTU(addr, 0);
// 统计当前CTU的色度块在BO和EO各模式下的像素归类
if (saoParam->bSaoFlag[1])
{
calcSaoStatsCTU(addr, 1);
calcSaoStatsCTU(addr, 2);
}
// 利用上一步的统计信息计算BO和EO初始补偿值
saoStatsInitialOffset(planes);
// SAO distortion calculation
m_entropyCoder.load(m_rdContexts.cur);
m_entropyCoder.resetBits();
if (allowMerge[0])
m_entropyCoder.codeSaoMerge(0);
if (allowMerge[1])
m_entropyCoder.codeSaoMerge(0);
m_entropyCoder.store(m_rdContexts.temp);
// Estimate distortion and cost of new SAO params
int64_t bestCost = 0;
int64_t rateDist = 0;
// Estimate distortion and cost of new SAO params
// 亮度和色度最优SAO模式的选择,得到最优率失真代价
saoLumaComponentParamDist(saoParam, addr, rateDist, lambda, bestCost);
if (chroma)
saoChromaComponentParamDist(saoParam, addr, rateDist, lambda, bestCost);
if (saoParam->bSaoFlag[0] || saoParam->bSaoFlag[1])
{
// Cost of merge left or Up, mergeIdx为0表示左边,为1表示上面
// 计算直接采用左边和上面CTU的SAO参数的代价
for (int mergeIdx = 0; mergeIdx < 2; ++mergeIdx)
{
// 如果左边或上面的CTU不存在,则跳过下面的计算,进入下一轮循环
if (!allowMerge[mergeIdx])
continue;
int64_t mergeDist = 0;
for (int plane = 0; plane < planes; plane++)
{
// 初始失真值为0,获取左边或上面CTU的SAO参数
int64_t estDist = 0;
SaoCtuParam* mergeSrcParam = &(saoParam->ctuParam[plane][addrMerge[mergeIdx]]);
int typeIdx = mergeSrcParam->typeIdx;
if (typeIdx >= 0)
{
// 如果是边带模式,获取第一个条带的编号;否则取值1
int bandPos = (typeIdx == SAO_BO) ? mergeSrcParam->bandPos : 1;
for (int classIdx = 0; classIdx < SAO_NUM_OFFSET; classIdx++)
{
// 根据4种类型的补偿值来计算失真差值
int mergeOffset = mergeSrcParam->offset[classIdx];
estDist += estSaoDist(m_count[plane][typeIdx][classIdx + bandPos], mergeOffset,
m_offsetOrg[plane][typeIdx][classIdx + bandPos]);
}
}
mergeDist += (estDist << 8) / lambda[!!plane];
}
m_entropyCoder.load(m_rdContexts.cur);
m_entropyCoder.resetBits();
if (allowMerge[0])
m_entropyCoder.codeSaoMerge(1 - mergeIdx);
if (allowMerge[1] && (mergeIdx == 1))
m_entropyCoder.codeSaoMerge(1);
uint32_t estRate = m_entropyCoder.getNumberOfWrittenBits();
int64_t mergeCost = mergeDist + estRate;
if (mergeCost < bestCost)
{
// merge的代价比SAO各模式代价更小,就采用merge模式
SaoMergeMode mergeMode = mergeIdx ? SAO_MERGE_UP : SAO_MERGE_LEFT;
bestCost = mergeCost;
m_entropyCoder.store(m_rdContexts.temp);
for (int plane = 0; plane < planes; plane++)
{
// 更新SAO参数为merge模式下的参数
if (saoParam->bSaoFlag[plane > 0])
{
SaoCtuParam* dstCtuParam = &saoParam->ctuParam[plane][addr];
SaoCtuParam* mergeSrcParam = &(saoParam->ctuParam[plane][addrMerge[mergeIdx]]);
dstCtuParam->mergeMode = mergeMode;
dstCtuParam->typeIdx = mergeSrcParam->typeIdx;
dstCtuParam->bandPos = mergeSrcParam->bandPos;
for (int i = 0; i < SAO_NUM_OFFSET; i++)
dstCtuParam->offset[i] = mergeSrcParam->offset[i];
}
}
} // if (mergeCost < bestCost) 结束
} // mergeIdx循环结束
if (saoParam->ctuParam[0][addr].typeIdx < 0)
m_numNoSao[0]++;
if (chroma && saoParam->ctuParam[1][addr].typeIdx < 0)
m_numNoSao[1]++;
m_entropyCoder.load(m_rdContexts.temp);
m_entropyCoder.store(m_rdContexts.cur);
}
}
/* 利用先前已经得到的统计信息(即m_count和m_offsetOrg)计算初始补偿值(即m_offset) */
void SAO::saoStatsInitialOffset(int planes)
{
memset(m_offset, 0, sizeof(m_offset));
// EO
for (int plane = 0; plane < planes; plane++)
{
// typeIdx, 边界补偿的四种模式,即 SAO_EO_X
for (int typeIdx = 0; typeIdx < MAX_NUM_SAO_TYPE - 1; typeIdx++)
{
// 任意一种模式下,边界点有四个种类
for (int classIdx = 1; classIdx < SAO_NUM_OFFSET + 1; classIdx++)
{
int32_t& count = m_count[plane][typeIdx][classIdx];
int32_t& offsetOrg = m_offsetOrg[plane][typeIdx][classIdx];
int32_t& offsetOut = m_offset[plane][typeIdx][classIdx];
if (count)
{
// 计算平均失真(offsetOrg/count并四舍五入),将其限制在[-7,7]之内
offsetOut = roundIBDI(offsetOrg, count << SAO_BIT_INC);
offsetOut = x265_clip3(-OFFSET_THRESH + 1, OFFSET_THRESH - 1, offsetOut);
// 种类1、种类2的补偿值必须大于等于0;
// 种类3、种类4的补偿值必须小于等于0.
if (classIdx < 3)
offsetOut = X265_MAX(offsetOut, 0);
else
offsetOut = X265_MIN(offsetOut, 0);
}
}
}
}
// BO,为每个条带计算初始补偿值
for (int plane = 0; plane < planes; plane++)
{
// 深度8位,256级分为32个边带,即[8k, 8k + 7]为第k个边带
for (int classIdx = 0; classIdx < MAX_NUM_SAO_CLASS; classIdx++)
{
int32_t& count = m_count[plane][SAO_BO][classIdx];
int32_t& offsetOrg = m_offsetOrg[plane][SAO_BO][classIdx];
int32_t& offsetOut = m_offset[plane][SAO_BO][classIdx];
if (count)
{
// 计算平均失真,并将其限制在[-7,7]之内
offsetOut = roundIBDI(offsetOrg, count << SAO_BIT_INC);
offsetOut = x265_clip3(-OFFSET_THRESH + 1, OFFSET_THRESH - 1, offsetOut);
}
}
}
}
/* 计算率失真代价值,公式为:(失真 + lambda * 编码比特数)*/
inline int64_t SAO::calcSaoRdoCost(int64_t distortion, uint32_t bits, int64_t lambda)
{
// lambda = 256.0 * x265_lambda2_tab[],所以需要右移8位,即除以256
// 数组x265_lambda2_tab 定义在 common/constants.cpp 中
return distortion + ((bits * lambda + 128) >> 8);
}
/**
* @brief 找到最优率失真代价及对应的补偿值和失真值.
* @param typeIdx : SAO模式,即 SAO_EO_X 和 SAO_BO
* @param lambda : 拉格朗日乘子,取值依赖QP,即 256.0 * x265_lambda2_tab[qp]
* @param count : typeIdx模式下,某classIdx的点的数目
* @param offsetOrg : 原始像素与重构像素(SAO补偿前)之间的差值之和
* @param offset[输出] : 最优率失真代价对应的补偿值
* @param distClasses[输出] : 最优率失真代价对应的失真
* @param costClasses[输出] : 最优率失真代价
*/
void SAO::estIterOffset(int typeIdx, int64_t lambda, int32_t count, int32_t offsetOrg,
int32_t& offset, int32_t& distClasses, int64_t& costClasses)
{
int bestOffset = 0;
distClasses = 0;
// Assuming sending quantized value 0 results in zero offset
// and sending the value zero needs 1 bit.
// entropy coder can be used to measure the exact rate here.
int64_t bestCost = calcSaoRdoCost(0, 1, lambda);
while (offset != 0)
{
// Calculate the bits required for signalling the offset
uint32_t rate = (typeIdx == SAO_BO) ? (abs(offset) + 2) : (abs(offset) + 1);
if (abs(offset) == OFFSET_THRESH - 1)
rate--;
// Do the dequntization before distorion calculation
// 计算D_post和 D_pre的差值,即SAO补偿前后失真的差值
int64_t dist = estSaoDist(count, offset << SAO_BIT_INC, offsetOrg);
// 计算率失真代价
int64_t cost = calcSaoRdoCost(dist, rate, lambda);
if (cost < bestCost)
{
bestCost = cost;
bestOffset = offset;
distClasses = (int)dist;
}
offset = (offset > 0) ? (offset - 1) : (offset + 1);
}
costClasses = bestCost;
offset = bestOffset;
}
/* 寻找亮度最优SAO模式,得到最优率失真代价 */
void SAO::saoLumaComponentParamDist(SAOParam* saoParam, int32_t addr, int64_t& rateDist,
int64_t* lambda, int64_t &bestCost)
{
int64_t bestDist = 0;
int bestTypeIdx = -1;
SaoCtuParam* lclCtuParam = &saoParam->ctuParam[0][addr];
int32_t distClasses[MAX_NUM_SAO_CLASS];
int64_t costClasses[MAX_NUM_SAO_CLASS];
// RDO SAO_NA
m_entropyCoder.load(m_rdContexts.temp);
m_entropyCoder.resetBits();
m_entropyCoder.codeSaoType(0);
// 计算初始的率失真代价值
int64_t costPartBest = calcSaoRdoCost(0, m_entropyCoder.getNumberOfWrittenBits(), lambda[0]);
// EO distortion calculation
// 外循环是EO的模式,即4种方向,内循环是点的种类
for (int typeIdx = 0; typeIdx < MAX_NUM_SAO_TYPE - 1; typeIdx++)
{
int64_t estDist = 0; // 用于保存某EO模式下各种类失真总和
for (int classIdx = 1; classIdx < SAO_NUM_OFFSET + 1; classIdx++)
{
int32_t& count = m_count[0][typeIdx][classIdx];
int32_t& offsetOrg = m_offsetOrg[0][typeIdx][classIdx];
int32_t& offsetOut = m_offset[0][typeIdx][classIdx];
// 计算率失真代价值最小的 offset
estIterOffset(typeIdx, lambda[0], count, offsetOrg, offsetOut,
distClasses[classIdx], costClasses[classIdx]);
// Calculate distortion
estDist += distClasses[classIdx];
}
m_entropyCoder.load(m_rdContexts.temp);
m_entropyCoder.resetBits();
m_entropyCoder.codeSaoOffsetEO(m_offset[0][typeIdx] + 1, typeIdx, 0);
// 计算某EO模式下的率失真代价,
// 如果比前面计算的更小,则更新最优率失真代和相应的EO模式值
int64_t cost = calcSaoRdoCost(estDist, m_entropyCoder.getNumberOfWrittenBits(), lambda[0]);
if (cost < costPartBest)
{
costPartBest = cost;
bestDist = estDist;
bestTypeIdx = typeIdx;
}
}
// 找到了最优的EO模式,则将最优模式值和补偿值保存起来
if (bestTypeIdx != -1)
{
lclCtuParam->mergeMode = SAO_MERGE_NONE;
lclCtuParam->typeIdx = bestTypeIdx;
lclCtuParam->bandPos = 0;
for (int classIdx = 0; classIdx < SAO_NUM_OFFSET; classIdx++)
lclCtuParam->offset[classIdx] = m_offset[0][bestTypeIdx][classIdx + 1];
}
// BO RDO,为每个条带计算最优率失真代价及对应的补偿值
// costClasses 保存了每个条带的最优率失真代价
int64_t estDist = 0;
for (int classIdx = 0; classIdx < MAX_NUM_SAO_CLASS; classIdx++)
{
int32_t& count = m_count[0][SAO_BO][classIdx];
int32_t& offsetOrg = m_offsetOrg[0][SAO_BO][classIdx];
int32_t& offsetOut = m_offset[0][SAO_BO][classIdx];
estIterOffset(SAO_BO, lambda[0], count, offsetOrg, offsetOut,
distClasses[classIdx], costClasses[classIdx]);
}
// Estimate Best Position
int64_t bestRDCostBO = MAX_INT64;
int32_t bestClassBO = 0;
// 统计任意连续4个条带的最优率失真代价之和,找出值最小的连续4个条带
for (int i = 0; i < MAX_NUM_SAO_CLASS - SAO_NUM_OFFSET + 1; i++)
{
int64_t currentRDCost = 0;
for (int j = i; j < i + SAO_NUM_OFFSET; j++)
currentRDCost += costClasses[j];
if (currentRDCost < bestRDCostBO)
{
bestRDCostBO = currentRDCost;
bestClassBO = i; // 连续4个条带的起始条带编号
}
}
// 计算最优的连续4个条带的失真之和
estDist = 0;
for (int classIdx = bestClassBO; classIdx < bestClassBO + SAO_NUM_OFFSET; classIdx++)
estDist += distClasses[classIdx];
m_entropyCoder.load(m_rdContexts.temp);
m_entropyCoder.resetBits();
m_entropyCoder.codeSaoOffsetBO(m_offset[0][SAO_BO] + bestClassBO, bestClassBO, 0);
// 计算BO模式下的率失真代价
int64_t cost = calcSaoRdoCost(estDist, m_entropyCoder.getNumberOfWrittenBits(), lambda[0]);
// 如果BO模式下的率失真代价比上面EO模式下的率失真代价更小,则更新相应的SAO参数
if (cost < costPartBest)
{
costPartBest = cost;
bestDist = estDist;
lclCtuParam->mergeMode = SAO_MERGE_NONE;
lclCtuParam->typeIdx = SAO_BO;
lclCtuParam->bandPos = bestClassBO;
for (int classIdx = 0; classIdx < SAO_NUM_OFFSET; classIdx++)
lclCtuParam->offset[classIdx] = m_offset[0][SAO_BO][classIdx + bestClassBO];
}
rateDist = (bestDist << 8) / lambda[0];
m_entropyCoder.load(m_rdContexts.temp);
m_entropyCoder.codeSaoOffset(*lclCtuParam, 0);
m_entropyCoder.store(m_rdContexts.temp);
}
/* 寻找色度最优SAO模式,得到最优率失真代价 */
void SAO::saoChromaComponentParamDist(SAOParam* saoParam, int32_t addr,
int64_t& rateDist, int64_t* lambda, int64_t &bestCost);
/* 统计某个CU内条带点数目及失真之和,count和stats分别是条带点计数和失真之和 */
void saoCuStatsBO_c(const int16_t *diff, const pixel *rec, intptr_t stride,
int endX, int endY, int32_t *stats, int32_t *count)
{
const int boShift = X265_DEPTH - SAO_BO_BITS;
for (int y = 0; y < endY; y++)
{
for (int x = 0; x < endX; x++)
{
int classIdx = rec[x] >> boShift; // 条带编号
stats[classIdx] += diff[x]; // 某条带失真累计
count[classIdx]++; // 某条带点数目累计
}
diff += MAX_CU_SIZE; // 下一行失真数据地址
rec += stride; // 当前CU的下一行重构图像地址
}
}
/* 统计CU内的点在EO_0模式(水平方向)下的各种类点的数目及失真之和 */
void saoCuStatsE0_c(const int16_t *diff, const pixel *rec, intptr_t stride,
int endX, int endY, int32_t *stats, int32_t *count)
{
int32_t tmp_stats[SAO::NUM_EDGETYPE];
int32_t tmp_count[SAO::NUM_EDGETYPE];
memset(tmp_stats, 0, sizeof(tmp_stats));
memset(tmp_count, 0, sizeof(tmp_count));
for (int y = 0; y < endY; y++)
{
int signLeft = signOf(rec[0] - rec[-1]); // 当前边界点的左符号
for (int x = 0; x < endX; x++)
{
int signRight = signOf2(rec[x], rec[x + 1]); // 当前边界点的右符号
uint32_t edgeType = signRight + signLeft + 2; // 边界点类型
signLeft = -signRight; // 当前点的右符号 = - 右边点的左符号
// edgeType与真实的点种类转换关系就是数组 s_eoTable[]
X265_CHECK(edgeType <= 4, "edgeType check failure\n");
tmp_stats[edgeType] += diff[x]; // 该类型点的失真累计
tmp_count[edgeType]++; // 该类型点的数目累计
}
diff += MAX_CU_SIZE;
rec += stride;
}
// 返回各类型点的失真之和和数目
for (int x = 0; x < SAO::NUM_EDGETYPE; x++)
{
stats[SAO::s_eoTable[x]] += tmp_stats[x];
count[SAO::s_eoTable[x]] += tmp_count[x];
}
}
/* 统计CU内的点在EO_1模式(垂直方向)下的各种类点的数目及失真之和 */
void saoCuStatsE1_c(const int16_t *diff, const pixel *rec, intptr_t stride,
int8_t *upBuff1, int endX, int endY, int32_t *stats, int32_t *count);
/* 统计CU内的点在EO_2模式(135度方向)下的各种类点的数目及失真之和 */
void saoCuStatsE2_c(const int16_t *diff, const pixel *rec, intptr_t stride, int8_t
*upBuff1, int8_t *upBufft, int endX, int endY, int32_t *stats, int32_t *count);
/* 统计CU内的点在EO_3模式(45度方向)下的各种类点的数目及失真之和 */
void saoCuStatsE3_c(const int16_t *diff, const pixel *rec, intptr_t stride,
int8_t *upBuff1, int endX, int endY, int32_t *stats, int32_t *count);

















 1174
1174

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









