






 本文探讨了使用STM32微控制器进行直线和圆弧插补的方法,包括DDA算法的实现,分析了独立和关联轴运动两种模式下的差异,以及速度和精度的影响。通过MATLAB模拟展示了不同速度和精度设置下的路径效果,讨论了如何优化算法以提高路径精度。
本文探讨了使用STM32微控制器进行直线和圆弧插补的方法,包括DDA算法的实现,分析了独立和关联轴运动两种模式下的差异,以及速度和精度的影响。通过MATLAB模拟展示了不同速度和精度设置下的路径效果,讨论了如何优化算法以提高路径精度。
打算用stm32做主控DIY台xy雕刻机,所以看了一点DDA直线插补和圆弧插补的东西,一些细节不是很懂,所以用matlab画了直线和圆弧的几种情况。代码在最后,这里的代码和数控技术的算法不一样。
DDA直线:
X,Y轴运动独立:
根据进给速度和直线信息,得从出X轴速度和Y轴速度
,周期为常数
,每周期X累加器增加
,当累加器溢出时,向相应电机发送脉冲,Y轴也一样。
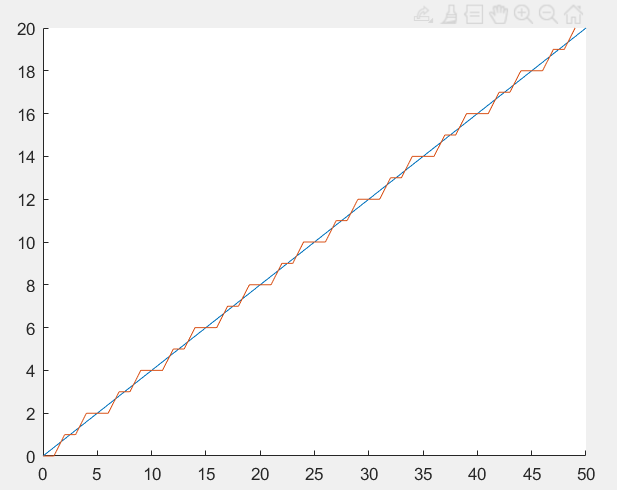
根据这个写了一个画直线的函数:
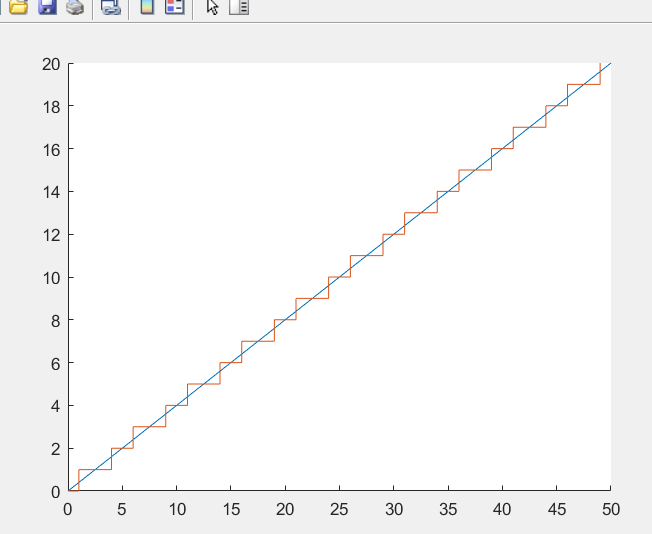
( 原点到(50,20),进给速度=0.1)
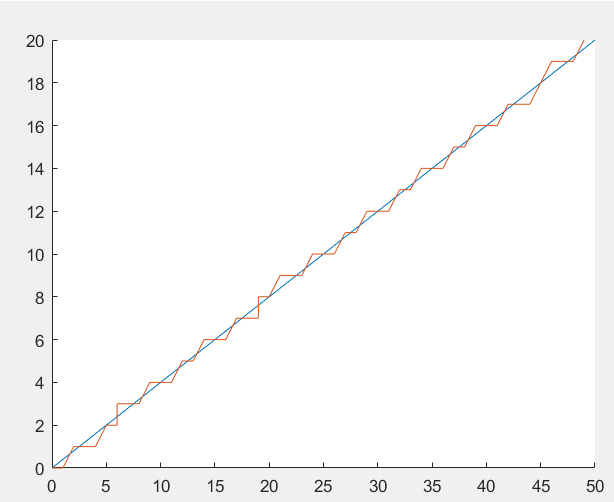
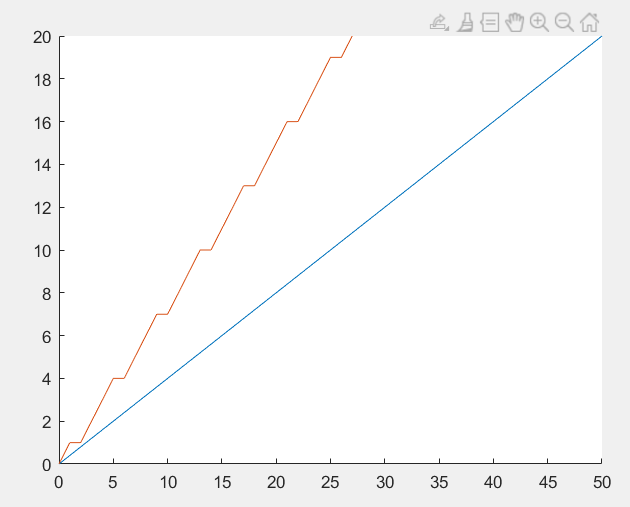
( 速度=1) (速度=2)
累加器做了半加载处理,半加载的对精度的改善相当于四舍五入,就像C语言中正浮点数四舍五入:int(5.5+0.5)。
如果进给速度太大,一个周期就会溢出太多导致画出来的直线失真严重,这跟数控技术中的不一样,数控技术的算法中满足
,这样画不会偏离太多。
X,Y轴运动关联:
上面,两轴运动独立,这里将两个轴的运动关联,这样画出来的路径就与速度无关,选一个方向,比如X轴,计算出X轴进给速度,X累加器每个周期累加Vx,当X轴累加器溢出时,向X电机发送1个脉冲并且Y轴累加器累加
,Y轴累加器溢出时向Y电机发送脉冲。
选位移较大的方向作为步进的方向,这样另一个轴累加值小于1。
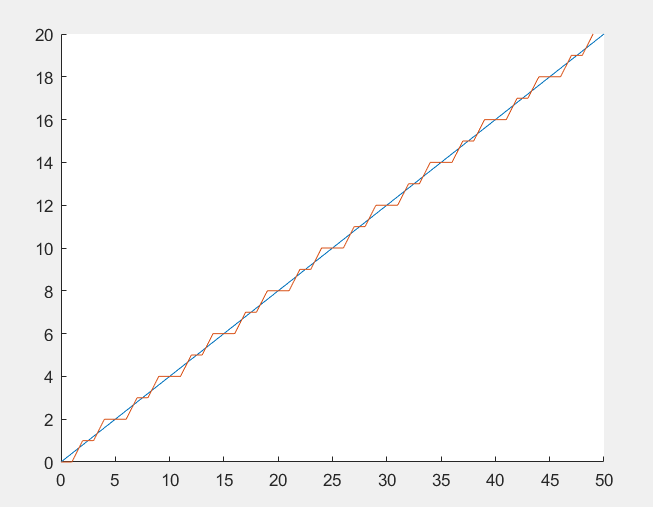
(原点到(50,20),速度=1) (速度=2)
这样画出来的路径不受程序的速度参数影响,路径与下面代码画出来的相同
X=0:50;Y=0.4*X;plot(X,int32(Y));
如果没有半加载,那就是
X=0:50;Y=0.4*X;plot(X,floor(Y));DDA圆弧:
X,Y轴运动独立:
推导1:
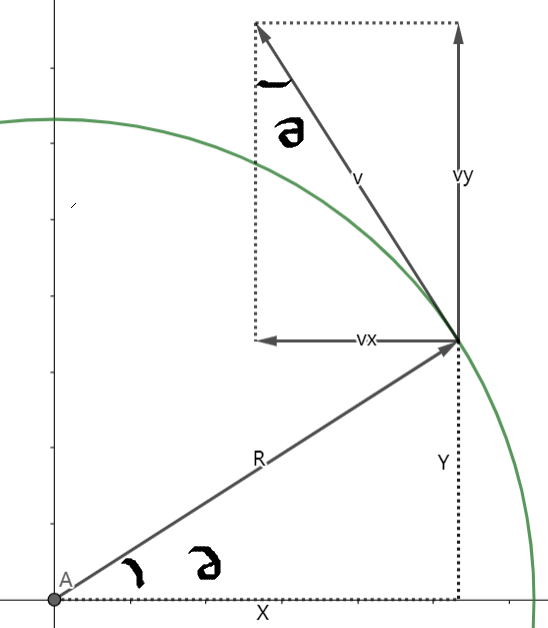
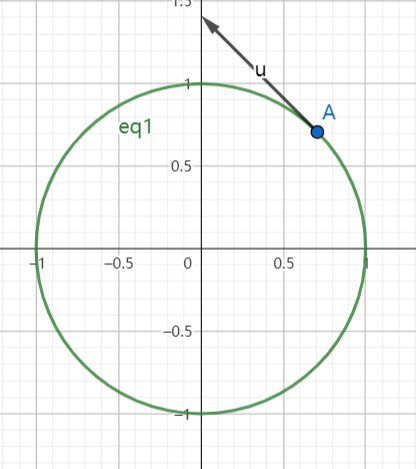
逆时针圆的参数方程:
对时间t求导:
(V是线速度)
有了初始坐标就能用上面的方程进行迭代(欧拉法):
是常数,所以也可以写成:
推导2:
接下来和推导1一样,注意下符号就行。
推导3:
首先速度向量与半径垂直,那么只要将位置坐标的XY互换一下再添个符号就行
,也就是向量(X,Y)的垂直向量是(-Y,X)或(Y,-X)。
推导1和推导2推得啥?画蛇添足吗?
做了这个操作后再除以模R乘以速度V。
接下来和推导1一样,注意下符号就行。
与上面一样,X,Y累加器每个周期累加,当累加器溢出时,向相应电机发出脉冲。
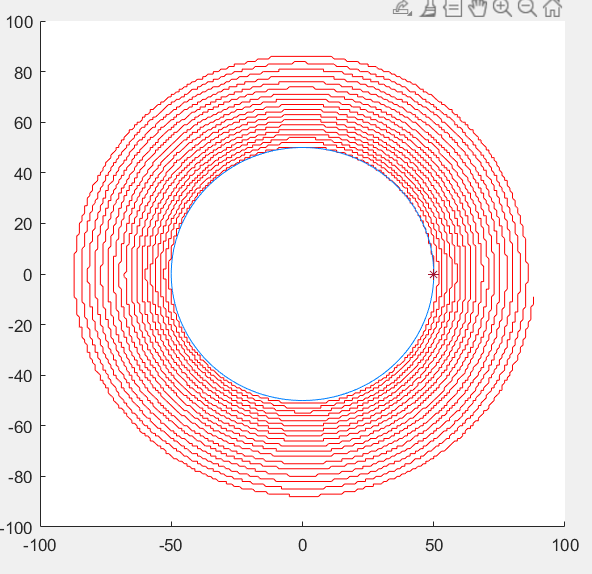
根据这个写了一个画圆的函数:
(起始于[50,0],速度=0.5,迭代次数=400)
一次性最好只画一个象限的圆弧,再根据圆的对称性画其他象限的圆弧,这样比较容易编程,效率也高。如果一次性画整圆,那必须得处理符号问题,这使得编程更复杂,同时也拖了效率。
但为了方便观察,这里的函数能一次性画出整个圆,改变迭代次数可以改变圆弧的长度。
这里,累加器不做半加载处理,因为累加值有符号,而正浮点四舍五入与负浮点四舍五入是不同的,int(5.5+0.5)、int(-5.5-0.5),半加载改成对累加器四舍五入后再判断溢出。
(迭代次数=8000)
迭代方程是一Z阶近似,这相当于沿着切线走,路肯定越走越宽,可以用二阶近似来提高精度。

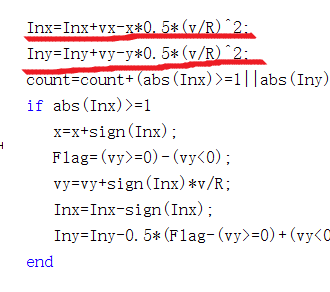
二阶近似推导1:
二阶近似推导2:
设
所以:
将cos与sin用泰勒一阶多项式替换得到之前方程:
将cos与sin用泰勒二阶多项式替换:
Y轴也一样,所以有:
一阶与二阶对比(紫线为二阶):
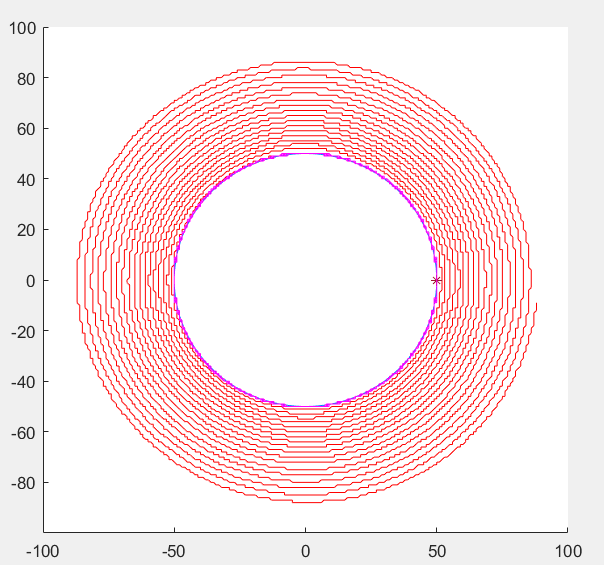
(迭代次数=8000) , (速度=1,迭代次数=8000)
某种隐式求解法:
将一阶方程,
改成:
在代码中只需要改变累加那一行的位置就可以实现。
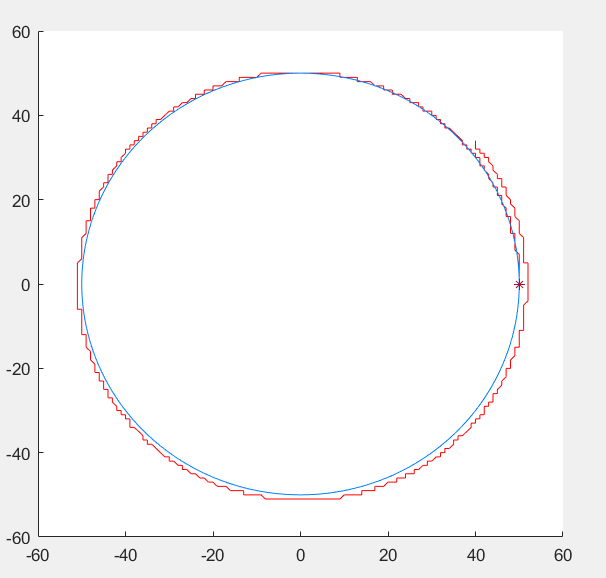
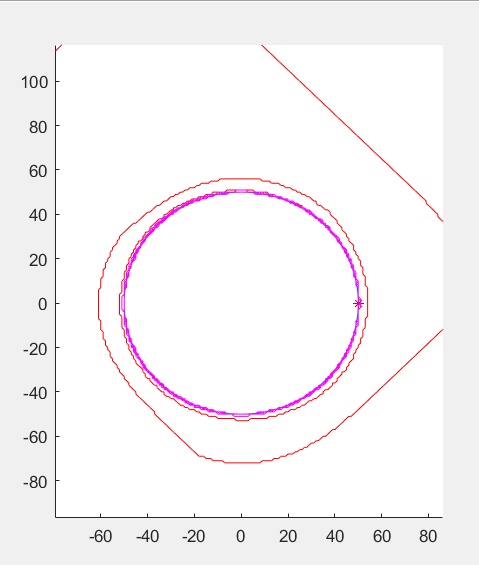
三者对比(黑线为隐方法):
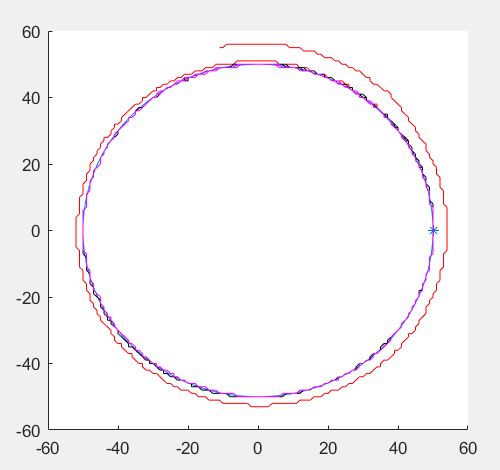
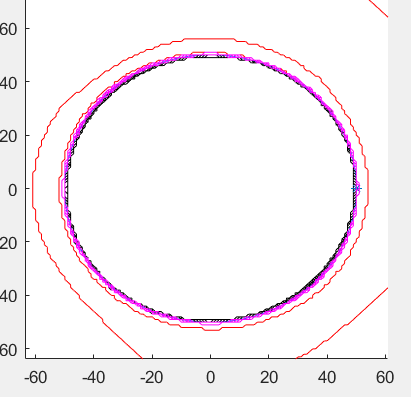
(速度=1,迭代次数=400)(速度=1,迭代次数=8000)
隐方法看起来还可以,提高速度看看(x,y是实数):
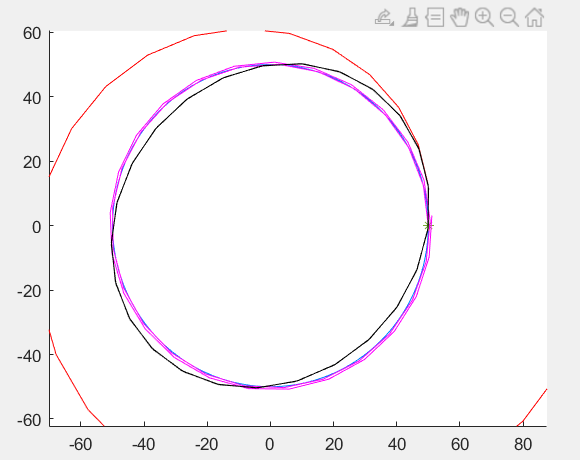
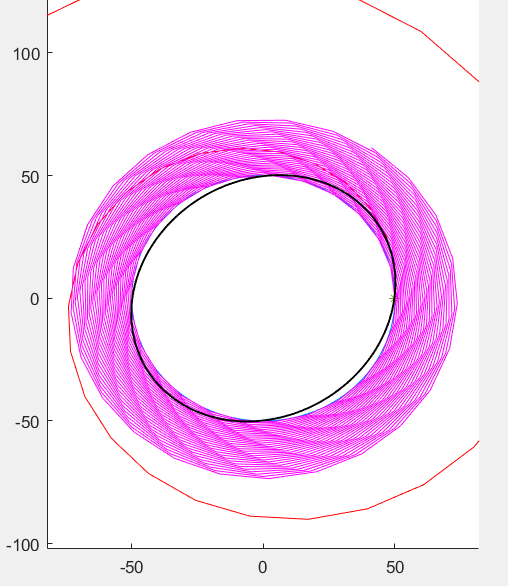
(速度=12.5,迭代次数=40) (迭代次数=800)
迭代次数为40时,紫线和圆严丝合缝,黑线形状变椭,迭代次数为800时,紫线已经往外走了,但黑线还在自己的轨道。
在运算量上,二阶的运算量比一阶的更多些,隐方法的与一阶的一样。
X,Y轴运动关联:
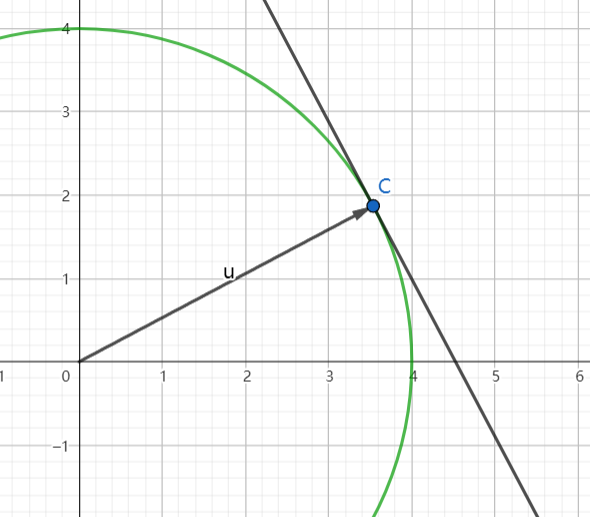
圆的标准方程:
对其求关于x的一、二阶导数得:
x与y对称的,所以:
从方程上来看,x=0或y=0时会出现斜率无穷大的情况,如果在画圆弧时始终选择一个轴作为主要方向,那就会出现斜率无穷大的情况。有一个解决方法:当X坐标绝对值与Y坐标绝对值相同时交换方向,既保证了从动方向的累加量小于等1又能保证不出现斜率无穷大的情况。
根据初始坐标选择方向,根据 ,
来计算XY轴速度的绝对值,选绝对值大的那个的对应轴作为主要方向,如果两绝对值相等,那就根据关于t的二阶导来判断。
比如对于初始坐标(0,50)有:,所以选Y轴作为主要方向开始迭代直到
或者说
时,交换方向。
根据以上写了个画圆的函数:
红线为一阶,黑线为二阶,
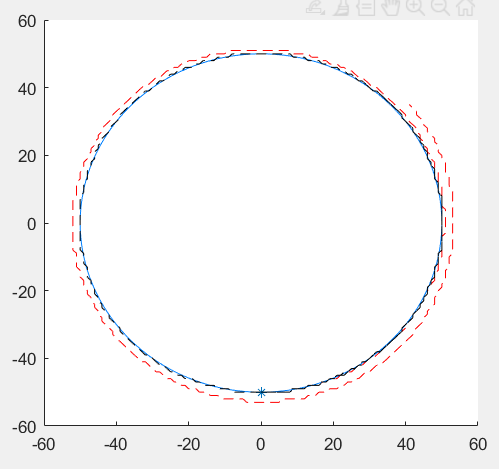
(速度=1,迭代次数=400) (速度=12)
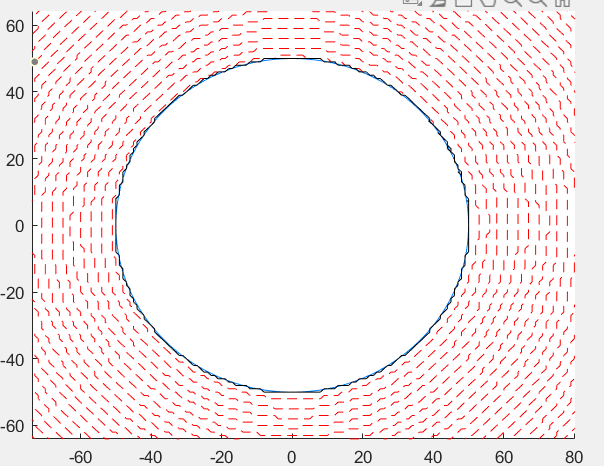
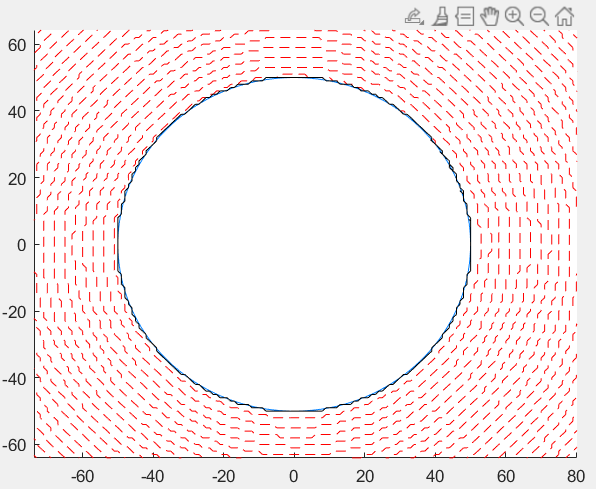
(速度=1,迭代次数=8000) (速度=12)
还是一样,画出来的路径不受程序的速度参数影响。
一阶情况下,两种圆弧积分的精确度控制:
画直线的话,其关于X或Y二阶导数恒为0,初始位置已知的情况下,X或Y一阶导数的积分与原路径是一样的。
圆方程关于X或Y二阶导不恒为0,所以用一阶导数来积分有误差,而和
的取值范围是{-1,1},这种情况下,可以调节精度但有点麻烦。
而运动独立的方法中,,
,可以通过调节△t来减小误差。
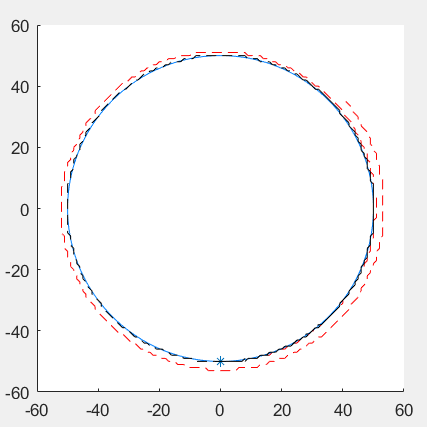
当圆弧的半径较小时,运动联合方法绘制的路径将会偏离较多且无法调节精度。(这里的代码没法调节联合方法的精确度)
在独立的方法中,将速度设置得尽可能地小,来提高精度。
(虚线为联合方法,实线为独立方法)
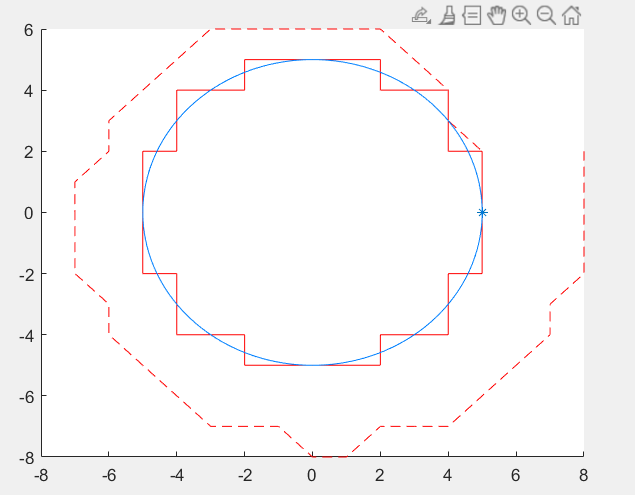
(起始[5,0],速度=0.005,迭代次数=40)
代码段:
function DqCir(R,pre,q)
% 此处显示有关此函数的摘要
% DCir:画象限圆
% q:象限
% R:半径
% pr:精度
% DqCir(50,0.01,1)
% 此处显示详细说明
A=pi/2*(q-1):pre:pi/2*q;
X=R*cos(A);
Y=R*sin(A);
plot(X,Y,'-','color',[0,0.5,1]);
end
DDA画直线(XY独立)
function Line_dda_1(sta,ed,v)
% 此处显示有关此函数的摘要
% Line_dda_1:DDA画直线(XY轴运动独立)
% 此处显示详细说明
% sta:起点
% ed:终点
% v:进给速度(精度)
% x,y电机一个脉冲移动1
Del=[ed(1)-sta(1),ed(2)-sta(2)];%[△x,△y]
if abs(Del(1))<1e-7 && abs(Del(2))<1e-7
warning('没有输入');
return;
end
vx=abs(v*Del(1)/norm(Del));%计算vx(dx)
vy=abs(v*Del(2)/norm(Del));
count=1;
Inx=0.5;%累加器半装载(四舍五入)
Iny=0.5;
pos=sta;
x=sta(1);
y=sta(2);
while 1
Inx=Inx+vx;
Iny=Iny+vy;
count=count+(Inx>=1|Iny>=1);
if Inx>=1
Inx=Inx-1;
x=x+sign(Del(1));
end
if Iny>=1
Iny=Iny-1;
y=y+sign(Del(2));
end
pos(count,:)=[x,y];%记录点
if abs(x-ed(1))<=0.5||abs(y-ed(2))<=0.5
break;
end
end
hold on
plot([sta(1),ed(1)],[sta(2),ed(2)]);
plot(pos(:,1),pos(:,2));
end
DDA画直线(XY关联)
function Line_dda_2(sta,ed,v)
% 此处显示有关此函数的摘要
% Line_dda_2:DDA画直线(XY轴运动关联)
% 此处显示详细说明
% sta:起点
% ed:终点
% v:进给速度
% x,y电机一个脉冲移动1
Del=[ed(1)-sta(1),ed(2)-sta(2)];%[△x,△y]
if abs(Del(1))<1e-7 && abs(Del(2))<1e-7
warning('没有输入');
return;
end
if abs(abs(Del(1))-abs(Del(2)))<1e-7 %abs(△x)=abs(△y)相等
v=abs(v*Del(1)/norm(Del));%计算vm
Flag=0;%同时移动
elseif abs(Del(1))>abs(Del(2)) %abs(△x)>abs(△y)
v=abs(v*Del(1)/norm(Del));
vl=abs(Del(2)/Del(1));
Flag=1;%主要方向为X方向
else
v=abs(v*Del(2)/norm(Del));
vl=abs(Del(1)/Del(2));
Flag=2;%主要方向为Y方向
end
count=1;
Inm=0.5;%累加器半装载(四舍五入)
Inl=0.5;
pos=sta;
x=sta(1);
y=sta(2);
while Flag~=3
Inm=Inm+v;
while Inm>=1
Inm=Inm-1;
if Flag~=0
x=x+sign(Del(1))*(Flag==1);
y=y+sign(Del(2))*(Flag==2);
Inl=Inl+vl;
if Inl>=1
Inl=Inl-1;
x=x+sign(Del(1))*(Flag==2);
y=y+sign(Del(2))*(Flag==1);
end
else
x=x+sign(Del(1));%同时移动
y=y+sign(Del(2));
end
count=count+1;
pos(count,:)=[x,y];%记录点
if count>=int32(max(abs(Del(2)),abs(Del(1))))%int32带有四舍五入
Flag=3;%停止
break;
end
end
end
hold on
plot([sta(1),ed(1)],[sta(2),ed(2)]);
plot(pos(:,1),pos(:,2));
end
(因符号的问题,画圆程序变得复杂)DDA画整圆(XY独立)
function Cirle_dda_1(R,sta,ed,v)
% Cirle_dda_1:DDA画圆弧(XY轴运动独立)
% sta:起点
% ed:迭代次数
% v:速度(精度)
% x,y电机一个脉冲移动1
% Cirle_dda_1(50,[50,0],8000,0.1);
% Cirle_dda_1(50,[0,50],8000,0.1);
% Cirle_dda_1(50,[-50,0],8000,0.1);
% Cirle_dda_1(50,[0,-50],8000,0.1);
if abs(sta(1))<1e-7 && abs(sta(2))<1e-7
warning('没有输入');
return;
end
%-----------------------一阶
pos=[sta];
count=1;
x=sta(1);%X坐标
y=sta(2);
vx=-y/R*v;%vx(dx)
vy=x/R*v;
Inx=0;%符号问题,使用半加载会让程序更复杂,改成累加器四舍五入后再判断溢出
Iny=0;
while 1
Inx=Inx+vx;%累加△x
Iny=Iny+vy;
count=count+(abs(Inx)+0.5>=1||abs(Iny)+0.5>=1);
if abs(Inx)+0.5>=1&&sign(Inx)==sign(vx)%溢出判断(四舍五入)
x=x+sign(Inx);
vy=vy+sign(Inx)*v/R;
Inx=Inx-sign(Inx);
end
if abs(Iny)+0.5>=1&&sign(Iny)==sign(vy)
y=y+sign(Iny);
vx=vx-sign(Iny)*v/R;
Iny=Iny-sign(Iny);
end
pos(count,:)=[x,y];
if count>ed
break;
end
end
hold on
plot(pos(:,1),pos(:,2),'color',[1,0,0]);
DqCir(R,0.01,1);
DqCir(R,0.01,2);
DqCir(R,0.01,3);
DqCir(R,0.01,4);
%----------------------隐方法
pos=[sta];
count=1;
x=sta(1);%X坐标
y=sta(2);
vx=-y/R*v;%vx(dx)
vy=x/R*v;
Inx=0;%符号问题,使用半加载会让程序更复杂,改成累加器四舍五入后再判断溢出
Iny=0;
while 1
Flag=0;%溢出标志位
Inx=Inx+vx;
if abs(Inx)+0.5>=1&&sign(Inx)==sign(vx)%溢出判断(四舍五入)
x=x+sign(Inx);
vy=vy+sign(Inx)*v/R;
Inx=Inx-sign(Inx);
Flag=1;
end
Iny=Iny+vy;
if abs(Iny)+0.5>=1&&sign(Iny)==sign(vy)
y=y+sign(Iny);
vx=vx-sign(Iny)*v/R;
Iny=Iny-sign(Iny);
Flag=1;
end
count=count+Flag;
pos(count,:)=[x,y];
if count>ed
break;
end
end
plot(sta(1),sta(2),'*');
plot(pos(:,1),pos(:,2),'color',[0,0,0]);
%----------------------二阶
pos=[sta];
count=1;
x=sta(1);%X坐标
y=sta(2);
vx=-y/R*v;%vx(dx)
vy=x/R*v;
Inx=0;%符号问题,使用半加载会让程序更复杂,改成累加器四舍五入后再判断溢出
Iny=0;
while 1
Inx=Inx+vx-x*0.5*(v/R)^2;%累加
Iny=Iny+vy-y*0.5*(v/R)^2;
count=count+(abs(Inx)+0.5>=1||abs(Iny)+0.5>=1);
if abs(Inx)+0.5>=1&&sign(Inx)==sign(vx)%溢出判断(四舍五入)
x=x+sign(Inx);
vy=vy+sign(Inx)*v/R;
Inx=Inx-sign(Inx);
end
if abs(Iny)+0.5>=1&&sign(Iny)==sign(vy)
y=y+sign(Iny);
vx=vx-sign(Iny)*v/R;
Iny=Iny-sign(Iny);
end
pos(count,:)=[x,y];
if count>ed
break;
end
end
plot(sta(1),sta(2),'*');
plot(pos(:,1),pos(:,2),'color',[1,0,1]);
end
DDA画圆弧(XY关联)
function Cirle_dda_2(R,sta,ed,v)
% Cirle_dda_2:DDA画圆弧
% sta:起点
% ed:迭代次数
% v:速度
% x,y电机一个脉冲移动1
% Cirle_dda_2(50,[50,0],8000,0.1);
% Cirle_dda_2(50,[0,50],8000,0.1);
% Cirle_dda_2(50,[-50,0],8000,0.1);
% Cirle_dda_2(50,[0,-50],8000,0.1);
%-------------------一阶
if abs(sta(1))<1e-7 && abs(sta(2))<1e-7
warning('没有输入');
return;
end
pos=[sta];
count=1;
x=sta(1);%X坐标
y=sta(2);
vx=-y/R*v;%vx(dx)
vy=x/R*v;
s=sign([vx,vy]);%符号
if abs(abs(vx)-abs(vy))<1e-7
Flag=(-x+vx>-y+vy)*1+(-x+vx<=-y+vy)*2;%根据二阶导判断主要方向
elseif abs(vx)>abs(vy)
Flag=1;%主要方向X方向
else
Flag=2;%主要方向Y方向
end
Inl=0;%符号问题,使用半加载会让程序更复杂,改成累加器四舍五入后再判断溢出
Inm=0;
while Flag~=3
Inm=Inm+vx*(Flag==1)+vy*(Flag==2); %累加
while(abs(Inm)+0.5>=1&&sign(Inm)==sign(s(Flag)))%溢出判断(四舍五入)
if Flag==1
Inl=Inl-x/y*sign(Inm);
else
Inl=Inl-y/x*sign(Inm);
end
x=x+sign(Inm)*(Flag==1);
y=y+sign(Inm)*(Flag==2);
vy=vy+sign(Inm)*v/R*(Flag==1);
vx=vx-sign(Inm)*v/R*(Flag==2);
Inm=Inm-sign(Inm);
while(abs(Inl)+0.5>=1&&sign(Inl)==sign(s(3-Flag)))%溢出判断(四舍五入)
x=x+sign(Inl)*(Flag==2);
y=y+sign(Inl)*(Flag==1);
vy=vy+sign(Inl)*v/R*(Flag==2);
vx=vx-sign(Inl)*v/R*(Flag==1);
Inl=Inl-sign(Inl);
end
s=sign([vx,vy]);
if (abs(vy)>abs(vx)&&Flag==1) || (abs(vy)<abs(vx)&&Flag==2)%判断是否需要交换方向
Inm=0;
Inl=0;
Flag=3-Flag;
end
count=count+1;
pos(count,:)=[x,y];
if count>ed
Flag=3;
break;
end
end
end
hold on
plot(sta(1),sta(2),'*');
plot(pos(:,1),pos(:,2),'--','color',[1,0,0]);
DqCir(R,0.01,1);
DqCir(R,0.01,2);
DqCir(R,0.01,3);
DqCir(R,0.01,4);
%-------------------二阶
pos=[sta];
count=1;
x=sta(1);%X坐标
y=sta(2);
vx=-y/R*v;%vx(dx)
vy=x/R*v;
s=sign([vx,vy]);%符号
if abs(abs(vx)-abs(vy))<1e-7
Flag=(-x+vx>-y+vy)*1+(-x+vx<=-y+vy)*2;%根据二阶导判断主要方向
elseif abs(vx)>abs(vy)
Flag=1;%主要方向X方向
else
Flag=2;%主要方向Y方向
end
Inl=0;%符号问题,使用半加载会让程序更复杂,改成累加器四舍五入后再判断溢出
Inm=0;
while Flag~=3
Inm=Inm+vx*(Flag==1)+vy*(Flag==2); %累加
while(abs(Inm)+0.5>=1&&sign(Inm)==sign(s(Flag)))%溢出判断(四舍五入)
if Flag==1
Inl=Inl-x/y*sign(Inm)-0.5*(y^2+x^2)/y^3;
else
Inl=Inl-y/x*sign(Inm)-0.5*(y^2+x^2)/x^3;
end
x=x+sign(Inm)*(Flag==1);
y=y+sign(Inm)*(Flag==2);
vy=vy+sign(Inm)*v/R*(Flag==1);
vx=vx-sign(Inm)*v/R*(Flag==2);
Inm=Inm-sign(Inm);
while(abs(Inl)+0.5>=1&&sign(Inl)==sign(s(3-Flag)))%溢出判断(四舍五入)
x=x+sign(Inl)*(Flag==2);
y=y+sign(Inl)*(Flag==1);
vy=vy+sign(Inl)*v/R*(Flag==2);
vx=vx-sign(Inl)*v/R*(Flag==1);
Inl=Inl-sign(Inl);
end
s=sign([vx,vy]);
if (abs(vy)>abs(vx)&&Flag==1) || (abs(vy)<abs(vx)&&Flag==2)%判断是否需要交换方向
Inm=0;
Inl=0;
Flag=3-Flag;
end
count=count+1;
pos(count,:)=[x,y];
if count>ed
Flag=3;
break;
end
end
end
plot(pos(:,1),pos(:,2),'--','color',[0,0,0]);
end

















 4918
4918

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









