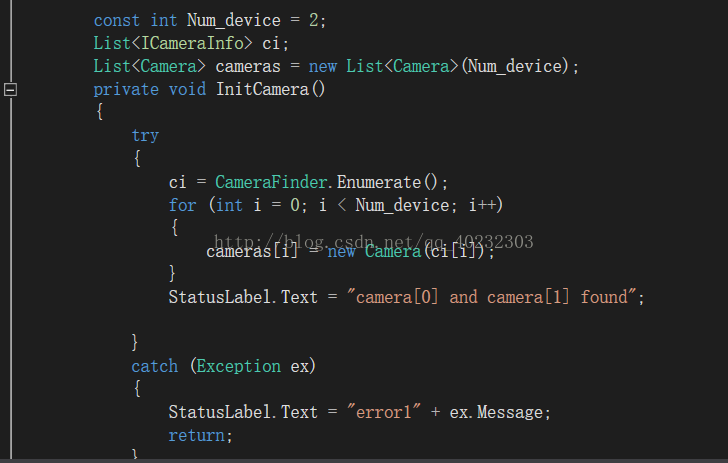
首先需要给两台相机分配IP地址,并且利用CameraFinder来找检索连接到系统的相机的信息。
然后,建立相机对象,在建立相机对象时有多个重载函数,其中有一个是用CameraInfo来建立对象,因此这种方法可以用来连接多台相机。

首先需要给两台相机分配IP地址,并且利用CameraFinder来找检索连接到系统的相机的信息。
然后,建立相机对象,在建立相机对象时有多个重载函数,其中有一个是用CameraInfo来建立对象,因此这种方法可以用来连接多台相机。
 488
488

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言