







一,前言
前面结合“平台总线-设备-驱动”模型分析了ts(触摸)驱动的加载过程,现在进入驱动程序分析下其具体的实现。涉及到输入子系统详解、input输入子系统核心层程序分析、evdev输入子系统事件处理层程序分析、ts输入子系统设备驱动层程序分析、字符设备驱动分析、主设备号和次设备号的使用、以及s3c2440的ADC转换和触摸控制器的操作。
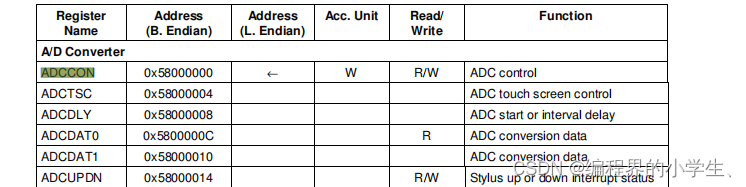
二,涉及的寄存器
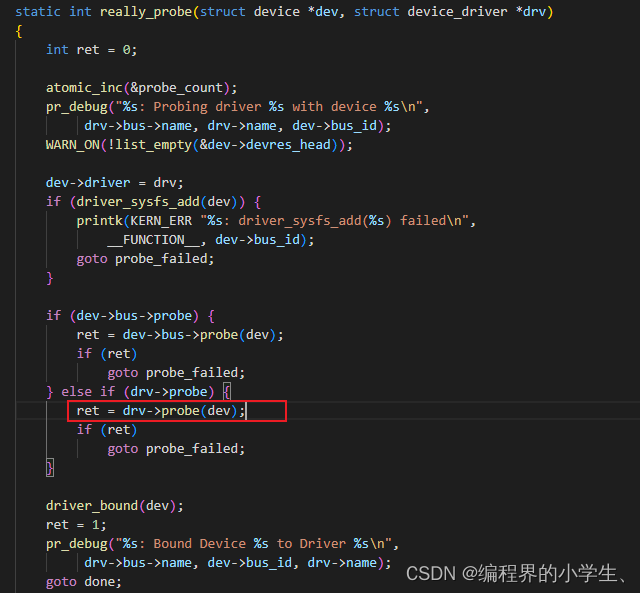
三,调用probe函数
根据上一篇的分析,驱动层通过platform_driver_register注册后,会调用到该驱动层的probe函数。
四,s3c2410ts_probe函数分析
4.1 硬件寄存器设置
4.1.1 获取设备参数
struct s3c2410_ts_mach_info *info;
info = ( struct s3c2410_ts_mach_info *)pdev->dev.platform_data;
/*
info
.delay = 10000, // ADC conversion start delay value
.presc = 49, // ADC clk
.oversampling_shift = 2, // 采样精度
*/
if (!info)
{
printk(KERN_ERR "Hm... too bad : no platform data for ts\n");
return -EINVAL;
}
4.1.2 使能ADC
adc_clock = clk_get(NULL, "adc");
if (!adc_clock) {
printk(KERN_ERR "failed to get adc clock source\n");
return -ENOENT;
}
clk_enable(adc_clock);
4.1.3 获取ADC & TOUCH SCREEN 寄存器
static inline void s3c2410_ts_connect(void)
{
s3c2410_gpio_cfgpin(S3C2410_GPG12, S3C2410_GPG12_XMON);
s3c2410_gpio_cfgpin(S3C2410_GPG13, S3C2410_GPG13_nXPON);
s3c2410_gpio_cfgpin(S3C2410_GPG14, S3C2410_GPG14_YMON);
s3c2410_gpio_cfgpin(S3C2410_GPG15, S3C2410_GPG15_nYPON);
}
{
.....
base_addr=ioremap(S3C2410_PA_ADC,0x20); //#define S3C2410_PA_ADC (0x58000000)
if (base_addr == NULL) {
printk(KERN_ERR "Failed to remap register block\n");
return -ENOMEM;
}
/* Configure GPIOs */
s3c2410_ts_connect(); // 设置GPIO功能
.....
}
4.1.4 设置ADC转换频率
if ((info->presc&0xff) > 0)
iowrite32(S3C2410_ADCCON_PRSCEN | S3C2410_ADCCON_PRSCVL(info->presc&0xFF),\
base_addr+S3C2410_ADCCON);
// 设置ADC clk
// A/D converter freq = PCLK/(info->presc+1)
// 一次adc转换所需时间Conversion time = 1/(A/D converter freq / 5cycles)
4.1.5 设置ADC转换开始的延时时间
因为ADC中断产生后的一段时间内电压还未稳定,如果立即进行ADC转换,那么转换值会有误差,这时就可以通过设置延时时间,待电压稳定后再执行转换以确保数值的准确性。
// 设置ADC conversion start delay value
if ((info->delay&0xffff) > 0)
iowrite32(info->delay & 0xffff, base_addr+S3C2410_ADCDLY);
4.1.6 进入等待触摸按下模式
iowrite32(WAIT4INT(0), base_addr+S3C2410_ADCTSC); // 等待触摸按下中断模式
自此,ADC & TOUCH SCREEN 寄存器初始设置完成。
4.2 注册ADC和TC中断
注册TC中断,监测触摸屏的按下和抬起;注册ADC中断,进行ADC转换。
/* Get irqs */
if (request_irq(IRQ_ADC, stylus_action, IRQF_SAMPLE_RANDOM | SA_SHIRQ,
"s3c2410_action", ts.dev)) {
printk(KERN_ERR "s3c2410_ts.c: Could not allocate ts IRQ_ADC !\n");
iounmap(base_addr);
return -EIO;
}
if (request_irq(IRQ_TC, stylus_updown, IRQF_SAMPLE_RANDOM,
"s3c2410_action", ts.dev)) {
printk(KERN_ERR "s3c2410_ts.c: Could not allocate ts IRQ_TC !\n");
iounmap(base_addr);
return -EIO;
}
4.2.1 TC中断处理函数 stylus_updown
static irqreturn_t stylus_updown(int irq, void *dev_id)
{
unsigned long data0;
unsigned long data1;
int updown;
// 读取寄存器DATA0和DATA1获取x,y轴的ADC转换值
data0 = ioread32(base_addr+S3C2410_ADCDAT0);
data1 = ioread32(base_addr+S3C2410_ADCDAT1);
// ADCDAT0 bit[15] 0 为按下,1 为松开 即updown 为true 则按下,为false 则松开
updown = (!(data0 & S3C2410_ADCDAT0_UPDOWN)) && (!(data1 & S3C2410_ADCDAT0_UPDOWN));
/* TODO we should never get an interrupt with updown set while
* the timer is running, but maybe we ought to verify that the
* timer isn't running anyways. */
if (updown)
{
// 如果为按下状态
touch_timer_fire(0);
}
return IRQ_HANDLED;
}
4.2.2 ADC中断处理函数 stylus_action
static irqreturn_t stylus_action(int irq, void *dev_id)
{
unsigned long data0;
unsigned long data1;
// if (bADCForTS) {
data0 = ioread32(base_addr+S3C2410_ADCDAT0);
data1 = ioread32(base_addr+S3C2410_ADCDAT1);
ts.xp += data0 & S3C2410_ADCDAT0_XPDATA_MASK; // 为四次adc转换值的累加
ts.yp += data1 & S3C2410_ADCDAT1_YPDATA_MASK; // 为四次adc转换值的累加
ts.count++;
// bADCForTS = 0;
// up(&gADClock);
// ts.count < 4 ,即四次adc转换值为一次按下的结果
if (ts.count < (1<<ts.shift)) {
// if (!down_trylock(&gADClock)) {
// bADCForTS = 1;
iowrite32(S3C2410_ADCTSC_PULL_UP_DISABLE | AUTOPST, base_addr+S3C2410_ADCTSC); // 进入 等待adc 转换模式
iowrite32(ioread32(base_addr+S3C2410_ADCCON) | S3C2410_ADCCON_ENABLE_START, base_addr+S3C2410_ADCCON); // 开启adc转换,转换在info->delay后进行,转换完成后会产生一个ADC中断
// }
} else {
mod_timer(&touch_timer, jiffies+1); // 启动一个定时器,一个jiffies(系统滴答时间) 后进入定时器处理函数 touch_timer_fire
iowrite32(WAIT4INT(1), base_addr+S3C2410_ADCTSC); // 同时等待 触摸抬起中断
}
// }
return IRQ_HANDLED;
}
4.2.3 定时器处理函数 touch_timer_fire
static struct timer_list touch_timer =
TIMER_INITIALIZER(touch_timer_fire, 0, 0);
static void touch_timer_fire(unsigned long data)
{
unsigned long data0;
unsigned long data1;
int updown;
data0 = ioread32(base_addr+S3C2410_ADCDAT0);
data1 = ioread32(base_addr+S3C2410_ADCDAT1);
updown = (!(data0 & S3C2410_ADCDAT0_UPDOWN)) && (!(data1 & S3C2410_ADCDAT0_UPDOWN));
// updown 为true 则按下,为false 则松开
if (updown) {
// 处于按下状态的处理
// 首次按下 产生了四次ADC转换后,才去处理x,y值
if (ts.count != 0) {
long tmp;
// 横纵坐标转换
tmp = ts.xp;
ts.xp = ts.yp;
ts.yp = tmp;
ts.xp >>= ts.shift; // 四次adc转换值的平均值为一次按下的结果
ts.yp >>= ts.shift; // 四次adc转换值的平均值为一次按下的结果
#ifdef CONFIG_TOUCHSCREEN_S3C2410_DEBUG
{
struct timeval tv;
do_gettimeofday(&tv);
printk(DEBUG_LVL "T: %06d, X: %03ld, Y: %03ld\n", (int)tv.tv_usec, ts.xp, ts.yp);
}
#endif
input_report_abs(ts.dev, ABS_X, ts.xp); // 上报x的坐标
input_report_abs(ts.dev, ABS_Y, ts.yp); // 上报y的坐标
input_report_key(ts.dev, BTN_TOUCH, 1); // 上报BIN_TOUCH 按下
input_report_abs(ts.dev, ABS_PRESSURE, 1); // 上报ABS_PRESSURE 按下
input_sync(ts.dev); // 上报事件完成
}
ts.xp = 0;
ts.yp = 0;
ts.count = 0;
// if (!down_trylock(&gADClock)) {
// bADCForTS = 1;
iowrite32(S3C2410_ADCTSC_PULL_UP_DISABLE | AUTOPST, base_addr+S3C2410_ADCTSC); // 进入 等待adc 转换模式
iowrite32(ioread32(base_addr+S3C2410_ADCCON) | S3C2410_ADCCON_ENABLE_START, base_addr+S3C2410_ADCCON); // 开启adc转换,完成后会产生一个ADC中断
// }
} else {
// 松开的处理
ts.count = 0;
input_report_key(ts.dev, BTN_TOUCH, 0); // 上报BIN_TOUCH 松开
input_report_abs(ts.dev, ABS_PRESSURE, 0);// 上报ABS_PRESSURE 松开
input_sync(ts.dev); // 上报事件完成
iowrite32(WAIT4INT(0), base_addr+S3C2410_ADCTSC); // 进入等待触摸按下中断
}
}
4.3 注册到输入子系统
4.3.1 申请input_dev
input_dev = input_allocate_device();
if (!input_dev) {
printk(KERN_ERR "Unable to allocate the input device !!\n");
return -ENOMEM;
}
4.3.2 设置input_dev
ts.dev = input_dev;
// 设置产生的事件类型,同步类事件、按键类事件和绝对位移事件
ts.dev->evbit[0] = BIT(EV_SYN) | BIT(EV_KEY) | BIT(EV_ABS);
// 设置某类事件类型中的具体事件
// 按键类事件中的触摸事件
ts.dev->keybit[LONG(BTN_TOUCH)] = BIT(BTN_TOUCH);
// 绝对位移类事件中的ABS_X、ABS_Y、压力值的值范围,0x3ff是该ADC转换器是10bit精度的,最大为0x3fff
input_set_abs_params(ts.dev, ABS_X, 0, 0x3FF, 0, 0);
input_set_abs_params(ts.dev, ABS_Y, 0, 0x3FF, 0, 0);
input_set_abs_params(ts.dev, ABS_PRESSURE, 0, 1, 0, 0); // 只设置有按下和抬起(0,1),没有具体的压力值
ts.dev->private = &ts;
ts.dev->name = s3c2410ts_name;
ts.dev->id.bustype = BUS_RS232;
ts.dev->id.vendor = 0xDEAD;
ts.dev->id.product = 0xBEEF;
ts.dev->id.version = S3C2410TSVERSION;
4.3.3 注册
input_register_device(ts.dev);
自此,该驱动设备注册到输入子系统中,会和事件处理层程序evdev匹配。
五,输入子系统
输入子系统分为三个层次,设备驱动层、核心层、以及事件处理层。
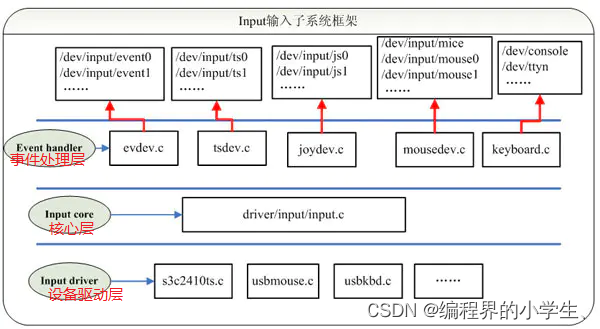
图片来源于网络
三个层级间的处理和联系
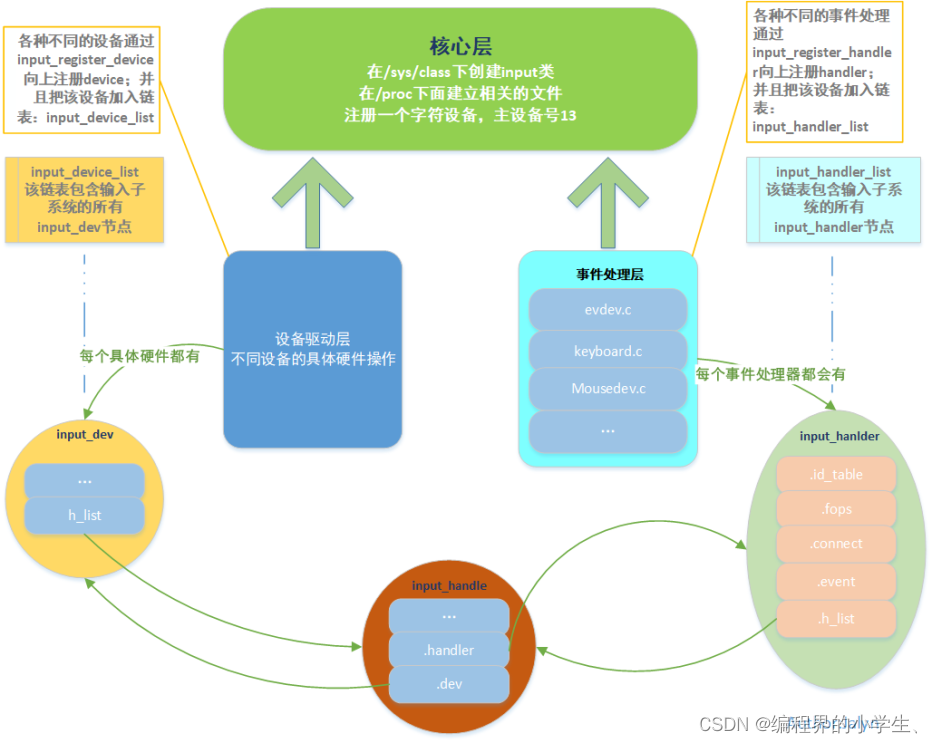
图片来源于网络
详细见csdn:https://blog.csdn.net/qq_40709487/article/details/126002350
六,驱动层ts程序和事件处理层程序evdev匹配
6.1 evdev的注册
编译进内核,系统启动时自动加载,进而调用其evdev_init函数。
6.1.1 编译进内核
linux-2.6.22.6/drivers/input/Makefile
obj-$(CONFIG_INPUT_EVDEV) += evdev.o
linux-2.6.22.6/.config
CONFIG_INPUT_EVDEV=y
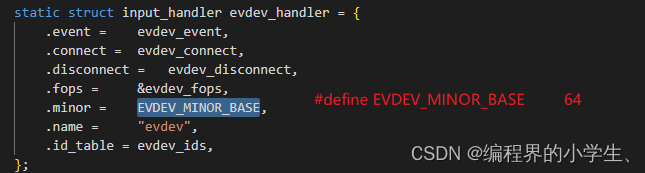
6.1.2 调用evdev_init,注册到输入子系统
static struct input_handler evdev_handler = {
.event = evdev_event,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.fops = &evdev_fops,
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids,
};
static int __init evdev_init(void)
{
return input_register_handler(&evdev_handler);
}
6.2 驱动层ts程序注册到输入子系统
由第四点的s3c2410ts_probe函数分析可知,驱动层通过input_register_device接口注册到输入子系统。
input_register_device(ts.dev);
6.3 匹配
6.3.1 evdev注册时尝试匹配驱动层ts程序
int input_register_handler(struct input_handler *handler)
{
struct input_dev *dev;
INIT_LIST_HEAD(&handler->h_list);
if (handler->fops != NULL) {
if (input_table[handler->minor >> 5])
return -EBUSY;
input_table[handler->minor >> 5] = handler;
}
// 将处理层程序加入到input_handler_list链表
list_add_tail(&handler->node, &input_handler_list);
// 从设备驱动层链表中取出每一个设备驱动层程序,和事件处理层程序匹配
list_for_each_entry(dev, &input_dev_list, node)
input_attach_handler(dev, handler);
input_wakeup_procfs_readers();
return 0;
}
static int input_attach_handler(struct input_dev *dev, struct input_handler *handler)
{
const struct input_device_id *id;
int error;
// 和事件处理层程序中设置的黑名单进行匹配,如果设备驱动层程序在白名单中,则忽略!
if (handler->blacklist && input_match_device(handler->blacklist, dev))
return -ENODEV;
// 进行匹配
id = input_match_device(handler->id_table, dev);
if (!id)
return -ENODEV;
// 调用事件处理层程序中的connect函数 使事件处理层程序和设备驱动层程序建立联系。
error = handler->connect(handler, dev, id);
if (error && error != -ENODEV)
printk(KERN_ERR
"input: failed to attach handler %s to device %s, "
"error: %d\n",
handler->name, kobject_name(&dev->cdev.kobj), error);
return error;
}
static const struct input_device_id *input_match_device(const struct input_device_id *id,
struct input_dev *dev)
{
int i;
// id:
// static const struct input_device_id evdev_ids[] = {
// { .driver_info = 1 }, /* Matches all devices */
// { }, /* Terminating zero entry */
// };
// dev:
// ts.dev->id.bustype = BUS_RS232;
// ts.dev->id.vendor = 0xDEAD;
// ts.dev->id.product = 0xBEEF;
// ts.dev->id.version = S3C2410TSVERSION;
// evdev事件处理层程序成功匹配ts驱动层程序
for (; id->flags || id->driver_info; id++) {
if (id->flags & INPUT_DEVICE_ID_MATCH_BUS)
if (id->bustype != dev->id.bustype)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_VENDOR)
if (id->vendor != dev->id.vendor)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_PRODUCT)
if (id->product != dev->id.product)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_VERSION)
if (id->version != dev->id.version)
continue;
MATCH_BIT(evbit, EV_MAX);
MATCH_BIT(keybit, KEY_MAX);
MATCH_BIT(relbit, REL_MAX);
MATCH_BIT(absbit, ABS_MAX);
MATCH_BIT(mscbit, MSC_MAX);
MATCH_BIT(ledbit, LED_MAX);
MATCH_BIT(sndbit, SND_MAX);
MATCH_BIT(ffbit, FF_MAX);
MATCH_BIT(swbit, SW_MAX);
return id;
}
return NULL;
}
6.3.2 驱动层ts程序注册时尝试匹配evdev
int input_register_device(struct input_dev *dev)
{
static atomic_t input_no = ATOMIC_INIT(0);
struct input_handler *handler;
const char *path;
int error;
set_bit(EV_SYN, dev->evbit);
/*
* If delay and period are pre-set by the driver, then autorepeating
* is handled by the driver itself and we don't do it in input.c.
*/
init_timer(&dev->timer);
if (!dev->rep[REP_DELAY] && !dev->rep[REP_PERIOD]) {
dev->timer.data = (long) dev;
dev->timer.function = input_repeat_key;
dev->rep[REP_DELAY] = 250;
dev->rep[REP_PERIOD] = 33;
}
/* 没有定义设备的getkeycode函数,则使用默认的获取键值函数 */
if (!dev->getkeycode)
dev->getkeycode = input_default_getkeycode;
/*没有定义设备的setkeycode函数,则使用默认的设定键值函数*/
if (!dev->setkeycode)
dev->setkeycode = input_default_setkeycode;
// 将设备驱动层程序加入到input_dev_list链表
list_add_tail(&dev->node, &input_dev_list);
snprintf(dev->cdev.class_id, sizeof(dev->cdev.class_id),
"input%ld", (unsigned long) atomic_inc_return(&input_no) - 1);
if (!dev->cdev.dev)
dev->cdev.dev = dev->dev.parent;
// 会在/sys/class/input设备类下创建设备 /sys/class/input/input%ld
error = class_device_add(&dev->cdev);
if (error)
return error;
path = kobject_get_path(&dev->cdev.kobj, GFP_KERNEL);
printk(KERN_INFO "input: %s as %s\n",
dev->name ? dev->name : "Unspecified device", path ? path : "N/A");
kfree(path);
// 从事件处理层程序链表中取出每一个事件处理层程序,和设备驱动层程序匹配
list_for_each_entry(handler, &input_handler_list, node)
input_attach_handler(dev, handler);
input_wakeup_procfs_readers();
return 0;
}
调用 input_attach_handler 之后的流程和evdev注册时尝试匹配驱动层ts程序一样
6.3.3 匹配成功建立联系
static int evdev_connect(struct input_handler *handler, struct input_dev *dev,
const struct input_device_id *id)
{
struct evdev *evdev;
struct class_device *cdev;
dev_t devt;
int minor;
int error;
// 从evdev_table数组中取出空位。最多支持32个设备。
for (minor = 0; minor < EVDEV_MINORS && evdev_table[minor]; minor++);
if (minor == EVDEV_MINORS) {
printk(KERN_ERR "evdev: no more free evdev devices\n");
return -ENFILE;
}
evdev = kzalloc(sizeof(struct evdev), GFP_KERNEL);
if (!evdev)
return -ENOMEM;
INIT_LIST_HEAD(&evdev->client_list);
init_waitqueue_head(&evdev->wait);
evdev->exist = 1;
evdev->minor = minor;
// handle中的handler成员指向了配对成功的handler,
// dev成员指向了配对成功的device,
// private成员则指向了evdev设备本身。
// 将设备驱动层程序存储在evdev handle中
evdev->handle.dev = dev;
evdev->handle.name = evdev->name;
// 将事件处理层程序存储在evdev handle中
evdev->handle.handler = handler;
evdev->handle.private = evdev;
sprintf(evdev->name, "event%d", minor);
evdev_table[minor] = evdev;
// 在/sys/class/input设备类下创建设备/sys/class/input/event0,并创建设备节点/dev/event%d 自此应用程序就可以通过设备节点读取与设置硬件设备
// input类的主设备号 创建设备的次设备号
devt = MKDEV(INPUT_MAJOR, EVDEV_MINOR_BASE + minor);
cdev = class_device_create(&input_class, &dev->cdev, devt,dev->cdev.dev, evdev->name);
if (IS_ERR(cdev)) {
error = PTR_ERR(cdev);
goto err_free_evdev;
}
/* temporary symlink to keep userspace happy */
error = sysfs_create_link(&input_class.subsys.kobj,
&cdev->kobj, evdev->name);
if (error)
goto err_cdev_destroy;
error = input_register_handle(&evdev->handle);
if (error)
goto err_remove_link;
return 0;
err_remove_link:
sysfs_remove_link(&input_class.subsys.kobj, evdev->name);
err_cdev_destroy:
class_device_destroy(&input_class, devt);
err_free_evdev:
kfree(evdev);
evdev_table[minor] = NULL;
return error;
}
int input_register_handle(struct input_handle *handle)
{
struct input_handler *handler = handle->handler;
// 将handle放到匹配成功的设备驱动层中的h_list上,将handle放到匹配成功的事件处理层中的h_list上
list_add_tail(&handle->d_node, &handle->dev->h_list);
list_add_tail(&handle->h_node, &handler->h_list);
if (handler->start)
handler->start(handle);
return 0;
}
自此,事件处理层程序和设备驱动层程序,成功建立联系。并成功创建设备节点,以供应用程序通过设备节点访问硬件设备。通过上文分析,链表input_handler_list和input_dev_list保存了handler与device,这两条链表都是全局链表,而input_hande 不是一个全局的链表。它注册的时候将自己分别挂在了input_dev_list和input_handler_list的h_list上了。
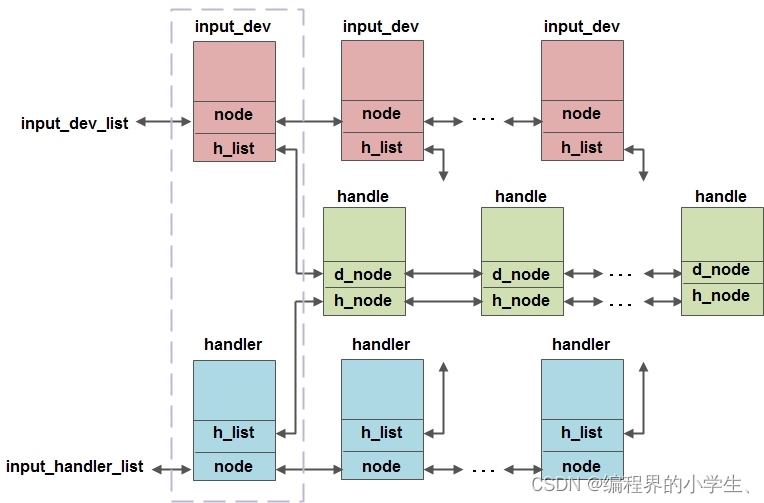
图片来源于网络
6.3.4 字符设备驱动–关于设备节点的创建和使用
1,在输入子系统初始化时注册了设备类,并注册了字符设备驱动。
static int __init input_init(void)
{
int err;
// 注册 intput 设备类
err = class_register(&input_class);
if (err) {
printk(KERN_ERR "input: unable to register input_dev class\n");
return err;
}
err = input_proc_init();
if (err)
goto fail1;
// 注册 字符设备
err = register_chrdev(INPUT_MAJOR, "input", &input_fops);
if (err) {
printk(KERN_ERR "input: unable to register char major %d", INPUT_MAJOR);
goto fail2;
}
return 0;
fail2: input_proc_exit();
fail1: class_unregister(&input_class);
return err;
}
2,在驱动程序调用input_register_device接口注册时,会创建一个input类设备"input0";在设备驱动层程序与事件处理层程序匹配成功调用evdev_connect接口时,会创建一个input类设备"event0",并为其创建一个设备节点,应用程序就可以通过这个设备节点去执行访问硬件设备。
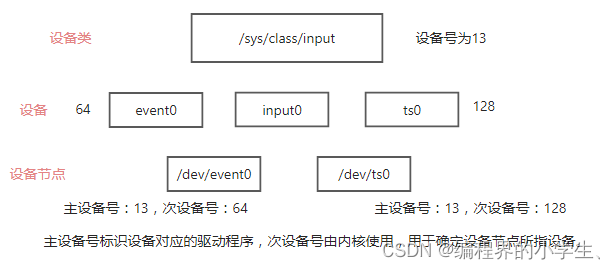
设备ts0 和 设备节点/dev/ts0 为input子系统中另一事件处理层程序创建。
在应用程序中open(/dev/event0,0)时,根据该设备节点的主设备号,在字符设备驱动链表中,找到对应的驱动程序,进而通过该驱动程序file_operations结构体中的open接口来打开设备。
拿/dev/event0设备节点来说,其主设备号为13,对应于输入子系统的核心层驱动。
#define INPUT_MAJOR 13
static const struct file_operations input_fops = {
.owner = THIS_MODULE,
.open = input_open_file,
};
err = register_chrdev(INPUT_MAJOR, "input", &input_fops);
if (err) {
printk(KERN_ERR "input: unable to register char major %d", INPUT_MAJOR);
goto fail2;
}
其次设备号为64,在evdev事件处理层程序注册到输入子系统中的时候,其通过 input_register_handler 接口将handler以"handler->minor >> 5"为下标放在了input_table数组中。
int input_register_handler(struct input_handler *handler)
{
struct input_dev *dev;
INIT_LIST_HEAD(&handler->h_list);
if (handler->fops != NULL) {
if (input_table[handler->minor >> 5])
return -EBUSY;
input_table[handler->minor >> 5] = handler;
}
list_add_tail(&handler->node, &input_handler_list);
list_for_each_entry(dev, &input_dev_list, node)
input_attach_handler(dev, handler);
input_wakeup_procfs_readers();
return 0;
}
当应用程序打开设备时调用input_open_file,再次通过设备节点的次设备号64>>5为下标从input_table数组中取出对应的handler,即evdev程序。进而得到evdev程序中的file_operations结构,将这个file_operations结构赋值给file->f_op,那么之后应用程序通过设备节点文件句柄来read、write等操作时,实际上就是调用evdev程序里的file_operations结构中的接口。
static int input_open_file(struct inode *inode, struct file *file)
{
// iminor(inode) 获取次设备号
struct input_handler *handler = input_table[iminor(inode) >> 5];
const struct file_operations *old_fops, *new_fops = NULL;
int err;
/* No load-on-demand here? */
if (!handler || !(new_fops = fops_get(handler->fops)))
return -ENODEV;
/*
* That's _really_ odd. Usually NULL ->open means "nothing special",
* not "no device". Oh, well...
*/
if (!new_fops->open) {
fops_put(new_fops);
return -ENODEV;
}
old_fops = file->f_op;
file->f_op = new_fops;
err = new_fops->open(inode, file);
if (err) {
fops_put(file->f_op);
file->f_op = fops_get(old_fops);
}
fops_put(old_fops);
return err;
}
evdev程序里的file_operations结构。
static const struct file_operations evdev_fops = {
.owner = THIS_MODULE,
.read = evdev_read,
.write = evdev_write,
.poll = evdev_poll,
.open = evdev_open,
.release = evdev_release,
.unlocked_ioctl = evdev_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl = evdev_ioctl_compat,
#endif
.fasync = evdev_fasync,
.flush = evdev_flush
};
七,事件上报过程
7.1 设备驱动层程序上报事件
input_report_abs(ts.dev, ABS_X, ts.xp); ->
input_event(dev, EV_ABS, code, value); ->
handle->handler->event(handle, type, code, value); 即evdev_event(handle, type, code, value); ->
// 给应用程序发可读信号,同时唤醒休眠队列,以便应用程序能够读到数据
kill_fasync(&client->fasync, SIGIO, POLL_IN); wake_up_interruptible(&evdev->wait);
应用程序 read ->
evdev_read(struct file *file, char __user *buffer, size_t count, loff_t *ppos); ->
(evdev_event_to_user(buffer + retval, event); ->
copy_to_user(buffer, event, sizeof(struct input_event))
自此 设备驱动层程序完成一次上报事件给到应用程序。
















 2226
2226











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











