







 本文是四旋翼学习系列的第一篇,介绍了四旋翼的动力学模型,包括升降、俯仰、横滚和偏航运动的原理。接着讲解了三维空间刚体运动姿态表示,通过欧拉角、旋转矩阵和四元数的角度,探讨了旋转表示方法及其特点,如欧拉角的万向锁问题和四元数的优势。
本文是四旋翼学习系列的第一篇,介绍了四旋翼的动力学模型,包括升降、俯仰、横滚和偏航运动的原理。接着讲解了三维空间刚体运动姿态表示,通过欧拉角、旋转矩阵和四元数的角度,探讨了旋转表示方法及其特点,如欧拉角的万向锁问题和四元数的优势。
暑假期间,对于四旋翼有一点兴趣,没有亲手做,但是看了一些资料。这个系列文章只是对自己看的东西的记录,对于想要学习了解相关知识的同学没有任何参考价值!
本篇是系列第一篇,分为两部分。第一部分定性描述了四旋翼飞行的动力学原理,第二部分从旋转矩阵,欧拉角,四元数三个方面介绍了三维空间刚体运动的表示方法。
一.动力学模型
可以把四旋翼的运动模型分为动力学模型和运动学模型两个部分。由于四旋翼的动力学模型比较简单,这里只对四旋翼的运动控制定性说明。
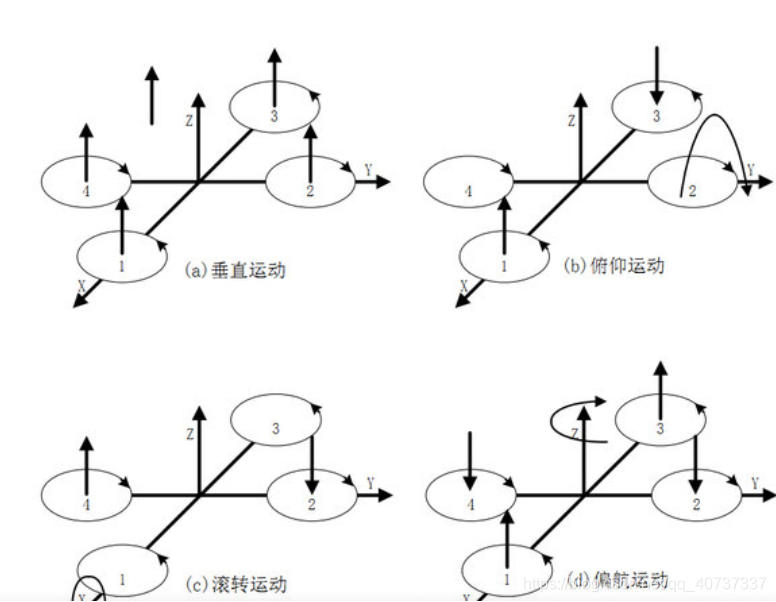
1.升降运动
四旋翼的四个浆叶分X形或十字形,相邻的两个旋翼转动方向相反,它们产生的反向扭矩刚好相互抵消,使得四轴在偏航方向能够保持平衡。当转速增加,飞行器克服升力,高度升高。反之转速减小,高度也就随之下降。
2.俯仰运动
如图所示,当电机1转速增大,电机3转速减小,飞行器产生一个向上的力矩,随之电机1上升,电机3下降。同时飞行器会向电机3的方向前进。
3.横滚运动
如图所示,当电机1,2中的一个提高转速另一个减小,就会产生横滚运动。同时飞行器也会左右移动。
4.偏航运动
偏航运动是机体围绕Z轴旋转的过程。单个旋翼,旋转时会产生反扭距,使得机身朝反方向旋转,这也是直升机需要尾桨的原因。图中逆时针旋转的两个桨加速,顺时针旋转的两个桨减速,这样机体就能顺时针旋转。
2.三维空间刚体运动姿态表示
1.欧拉角
首先介绍欧拉发明的欧拉角说起。欧拉角应该是最容易理解的旋转表示方法。
如图所示,一般使用ZYX的顺序旋转物体,下图是一架飞机按照ZYX组合进行旋转产生欧拉角的过程,其中,ψ为偏航角,θ为俯仰角,φ为滚转角。这样使用三个参数就能唯一表示一种旋转方式。

欧拉角最大的问题是存在万向锁,数学上叫做奇异性。可以使用手中的手机感受一下。先将手机屏幕面于地面平行,绕Z轴旋转任意角度,然后将手机向上仰90度,使得屏幕面和地面垂直,这样不论如何,第三次旋转和第一次旋转将使用同一个Z轴,使得物体相当于损失了一个自由度。
2.旋转矩阵
在线性代数中学过,
[ a 1 a 2 a 3 ] = R ∗ [ a 1 , a 2 , a 3 , ] \begin{bmatrix} a_1\\a_2\\a_3 \end{bmatrix} \quad=R*\begin{bmatrix} a_1^,\\a_2^,\\a_3^, \end{bmatrix} \quad ⎣⎡a1a2a3⎦⎤=R∗⎣⎡
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









