







大部分的嵌入式系统都包括一些I/O设备,例如仪器上的数据显示屏、工业设备上的串口通信、数据采集设备上模拟数据采样、用于保存数据的Flash/SD卡以及网络设备上的以太网接口等,都是嵌入式系统中容易找到的I/O设备例子。
本专栏主要是分享RT-Thread是如何对不同的I/O设备进行管理的。读完本专栏,我们会了解到如何从宏观角度去管理I/O设备,为我们在编写代码时有一个参考的管理模型,从而提高我们代码的复用性、降低耦合性,从而实现换硬件不动软件的目标。
1、《设备与驱动:I/O设备模型》
2、《设备与驱动:UART设备》
3、《设备与驱动:PIN设备》
4、《设备与驱动:ADC设备》
5、《设备与驱动:DAC设备》
6、《设备与驱动:CAN设备》
7、《设备与驱动:I2C设备》
8、《设备与驱动:PWM设备》
9、《设备与驱动:SPI设备》
更详细的CAN介绍,可以参考往期文章:
一、CAN简介
CAN 是控制器局域网络 (Controller Area Network, CAN) 的简称,是由以研发和生产汽车电子产品著称的德国 BOSCH 公司开发的,并最终成为国际标准(ISO 11898),是国际上应用最广泛的现场总线之一。
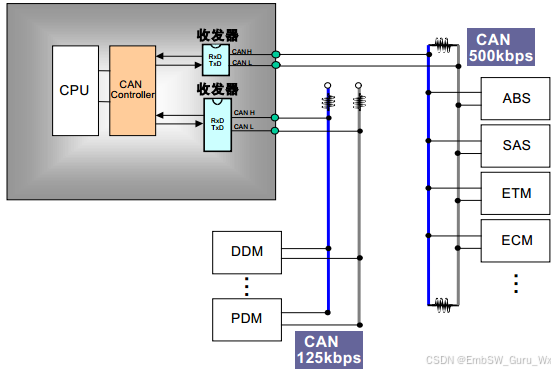
CAN 控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。 CAN 的连接示意图如下图所示:
CAN 总线有如下特点:
- CAN 总线是可同时连接多个单元的总线。可连接的单元总数理论上是没有限制的。但实际上可连接的单元数受总线上的时间延迟及电气负载的限制。降低通信速度,可连接的单元数增加;提高通信速度,则可连接的单元数减少。
- 多主控制。在总线空闲时,所有的单元都可开始发送消息(多主控制)。多个单元同时开始发送时,发送高优先级 ID 消息的单元可获得发送权。
- 消息的发送。在 CAN 协议中,所有的消息都以固定的格式发送。总线空闲时,所有与总线相连的单元都可以开始发送新消息。两个以上的单元同时开始发送消息时,根据标识符 ID 决定优先级。ID 表示访问总线的消息的优先级。两个以上的单元同时开始发送消息时,对各消息 ID 的每个位进行逐个仲裁比较。仲裁获胜(被判定为优先级最高)的单元可继续发送消息,仲裁失利的单元则立刻停止发送而进行接收工作。
- 根据整个网络的规模,可设定适合的通信速度。在同一网络中,所有单元必须设定成统一的通信速度。即使有一个单元的通信速度与其它的不一样,此单元也会输出错误信号,妨碍整个网络的通信。不同网络间则可以有不同的通信速度。
CAN 协议包括 5 种类型的帧:
- 数据帧
- 遥控帧
- 错误帧
- 过载帧
- 帧间隔
数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有 11 个位的 ID,扩展格式有 29 个位的 ID。
各种帧的用途如下表所示:
| 帧 | 帧用途 |
| 数据帧 | 用于发送单元向接收单元传送数据的帧 |
| 遥控帧 | 用于接收单元向具有相同 ID 的发送单元请求数据的帧 |
| 错误帧 | 用于当检测出错误时向其它单元通知错误的帧 |
| 过载帧 | 用于接收单元通知其尚未做好接收准备的帧 |
| 帧间隔 | 用于将数据帧及遥控帧与前面的帧分离开来的帧 |




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











