







目录
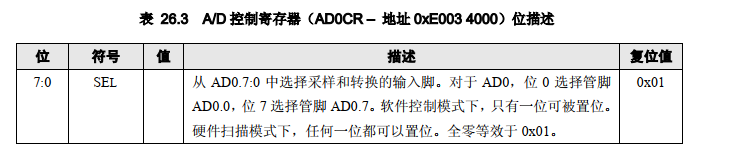
3.1、A/D控制寄存器( AD0CR - 0xE003 4000)
3.2、A/D全局数据寄存器( AD0GDR - 0xE003 4004)
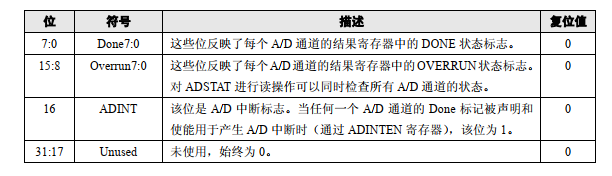
3.3、A/D状态寄存器( ADSTAT - 0xE003 4030)
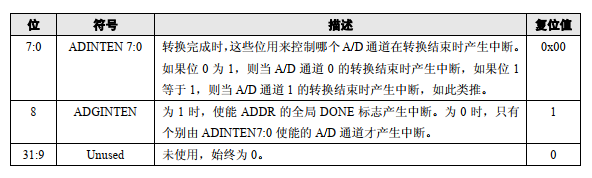
3.4、A/D中断使能寄存器( ADINTEN - 0xE003 400C)
3.5、A/D数据寄存器( ADDR0~ADDR7 - 0xE003 4010~0xE003 402C)
1、开发环境
LPC-2478STK+IAR+JINK
2、原理图
对应的是ADC0[7]-> P0[13],PINSEL0应设置为11

![]()
3、相关寄存器
A/D 转换器的基本时钟由 APB 时钟(PCLK)提供。 每个转换器包含一个可编程的分频器,它可将这个时钟调整为逐次逼近转换所需的 4.5MHz(最大)。完全满足精度要求的转换需要 11 个这样的时钟。
3.1、A/D控制寄存器( AD0CR - 0xE003 4000)

3.2、A/D全局数据寄存器( AD0GDR - 0xE003 4004)

3.3、A/D状态寄存器( ADSTAT - 0xE003 4030)
3.4、A/D中断使能寄存器( ADINTEN - 0xE003 400C)
3.5、A/D数据寄存器( ADDR0~ADDR7 - 0xE003 4010~0xE003 402C)

4、触发方式
如果 ADCR 的 BURST 位为 0 且 START 字段的值包含在 010-111 之内,那么当所选管脚或定时器匹配信号发生跳变时 A/D 转换器启动一次转换。也可选择在 4 个匹配信号中任何一个的指定边沿转换,或者在 2 个捕获/匹配管脚中任何一个的指定边沿转换。将所选端口的管脚状态或所选的匹配信号与 ADCR 的位 27 异或来作为边沿检测逻辑。
5、代码实现
#include <nxp/iolpc2478.h>
#include <intrinsics.h>
typedef unsigned char u8;
typedef unsigned short u16;
typedef unsigned int u64;
typedef unsigned long u32;
#ifndef NULL
#define NULL ((void*)0)
#endif
/* P1[13] 低电平导通 */
#define led1 13
/* P1[18] 低电平导通 */
#define led2 18
/* P2[19] 按下低电平,悬空高电平 */
#define but1 19
/* P2[21] 按下低电平,悬空高电平 */
#define but2 21
#define led1_on (FIO1CLR |= 0x01 << led1)
#define led1_off (FIO1SET |= 0x01 << led1)
#define led2_on (FIO1CLR |= 0x01 << led2)
#define led2_off (FIO1SET |= 0x01 << led2)
void enable_fast_port()
{
SCS |= 1 << 0;
}
void gpio_init()
{
PINSEL2 &= ~(0x03 << led1*2);
FIO1DIR &= ~(0x01 << led1);
FIO1DIR |= 0x01 << led1;
led1_off;
PINSEL3 &= ~(0x03 << ((led2 % 16)*2));
FIO1DIR &= ~(0x01 << led2);
FIO1DIR |= 0x01 << led2;
led2_off;
PINSEL5 &= ~(0x03 << ((but1 % 16)*2));
PINSEL5 |= (0x0 << ((but1 % 16)*2));
FIO2DIR &= ~(0x01 << but1);
PINSEL5 &= ~(0x03 << ((but2 % 16)*2));
PINSEL5 |= (0x0 << ((but2 % 16)*2));
FIO2DIR &= ~(0x01 << but2);
}
void led1_reverse(void)
{
if ((FIO1SET & (0x01 << led1)) == 0)
led1_off;
else
led1_on;
}
void led2_reverse(void)
{
if ((FIO1SET & (0x01 << led2)) == 0)
led2_off;
else
led2_on;
}
u32 irq_result;
void adc_irq(void)
{
irq_result = AD0GDR_bit.RESULT;
VICADDRESS = 0x00;
}
void VIC_SetVectoredIRQ(void(*pIRQSub)(), unsigned int Priority,
unsigned int VicIntSource)
{
unsigned long volatile *pReg;
// load base address of vectored address registers
pReg = &VICVECTADDR0;
// Set Address of callback function to corresponding Slot
*(pReg+VicIntSource) = (unsigned long)pIRQSub;
// load base address of ctrl registers
pReg = &VICVECTPRIORITY0;
// Set source channel and enable the slot
*(pReg+VicIntSource) = Priority;
// Clear FIQ select bit
VICINTSELECT &= ~(1<<VicIntSource);
}
__irq __arm void IRQ_Handler (void)
{
void (*interrupt_function)();
unsigned int vector;
vector = VICADDRESS; // Get interrupt vector.
interrupt_function = (void(*)())vector;
if(interrupt_function != NULL)
{
interrupt_function(); // Call vectored interrupt function.
}
else
{
VICADDRESS = 0; // Clear interrupt in VIC.
}
}
void adc_irq_init(u8 channel)
{
if (channel > 7)
channel = 0;
VIC_SetVectoredIRQ(adc_irq,0,VIC_AD0);
VICINTENABLE |= 1 << VIC_AD0;
ADINTEN = (1 << channel);
__enable_interrupt();
}
void adc_channel_set(u8 channel)
{
if (channel > 7)
channel = 0;
switch (channel){
case 0:PINSEL1_bit.P0_23 = 0x01;break;
case 1:PINSEL1_bit.P0_24 = 0x01;break;
case 2:PINSEL1_bit.P0_25 = 0x01;break;
case 3:PINSEL1_bit.P0_26 = 0x01;break;
case 4:PINSEL3_bit.P1_30 = 0x03;break;
case 5:PINSEL3_bit.P1_31 = 0x03;break;
case 6:PINSEL0_bit.P0_12 = 0x03;break;
case 7:PINSEL0_bit.P0_13 = 0x03;break;
}
}
void adc_software_init(u8 channel)
{
u8 div;
PCONP |= 1 << 12;
adc_channel_set(channel);
div = 1;/* 1MHz/1=1MHz*/
AD0CR_bit.CLKDIV = div;
AD0CR_bit.BURST = 0;
AD0CR_bit.START = 0;
AD0CR_bit.PDN = 1;
}
void adc_handware_init(u8 channel)
{
u8 div;
PCONP |= 1 << 12;
adc_channel_set(channel);
div = 1;/* 1MHz/1=1MHz*/
AD0CR_bit.CLKDIV = div;
AD0CR_bit.BURST = 1;
AD0CR_bit.START = 0;
AD0CR_bit.PDN = 1;
}
void adc_mat_init(u8 channel)
{
u8 div;
PCONP |= 1 << 12;
adc_channel_set(channel);
div = 1;/* 1MHz/1=1MHz*/
AD0CR_bit.CLKDIV = div;
AD0CR_bit.BURST = 0;
AD0CR_bit.CLKS = 0;
AD0CR_bit.START = 6;
AD0CR_bit.PDN = 1;
AD0CR_bit.EDGE = 1;
AD0CR_bit.SEL = 1<<channel;
PCONP |= 1 << 2;
T1MCR = 0x02;
T1EMR = (3 << 4);
T1MR0 = 1000000;
T1TCR = 0x01;
}
u32 GetADC(u8 channel)
{
u32 result;
if (channel > 7)
channel = 0;
AD0CR_bit.SEL = 1 << channel;
AD0CR_bit.START = 0x01;
while (!AD0GDR_bit.DONE);
AD0CR_bit.START = 0x0;
if (AD0GDR_bit.OVERUN == 1)
return 0;
result = AD0GDR_bit.RESULT;
return result;
}
//#define adc_SW_Trigger_Enable
//#define adc_HW_Trigger_Enable
#define adc_MAT_Trigger_Enable
#define irq_enable
int main(void)
{
enable_fast_port();
gpio_init();
#ifdef adc_SW_Trigger_Enable
adc_software_init(7);
#endif
#ifdef adc_HW_Trigger_Enable
adc_handware_init(7);
#endif
#ifdef adc_MAT_Trigger_Enable
adc_mat_init(7);
#endif
#ifdef irq_enable
adc_irq_init(7);
while(1){}
#else
while(1){
GetADC(7);
}
#endif
}















 564
564











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









