










目录
GCPMarker致力于填补航测内业自动化的最后一块拼图--“刺点”。虽然目前已有很多无人机厂商宣称自家产品可以做到免相控,但其实都是针对理想场景而言。在实际生产中如果不做相控则无法保证最终的航测成果质量,也无法对成果精度进行检核,因此还是需要布设像控点。
而目前各种测图软件中都需要人工手动刺点。当像控点数量较多时这将是一项十分枯燥繁琐的工作,目前已经成为了航测内业自动化的最后一个阻碍。而通过GCPMarker软件自动刺点可以极大地提高刺点效率,减少内业人员的工作量,缩短项目周期。若有兴趣可以加微信kkjj923进行交流。软件的详细介绍如下。
目录
1.界面简介
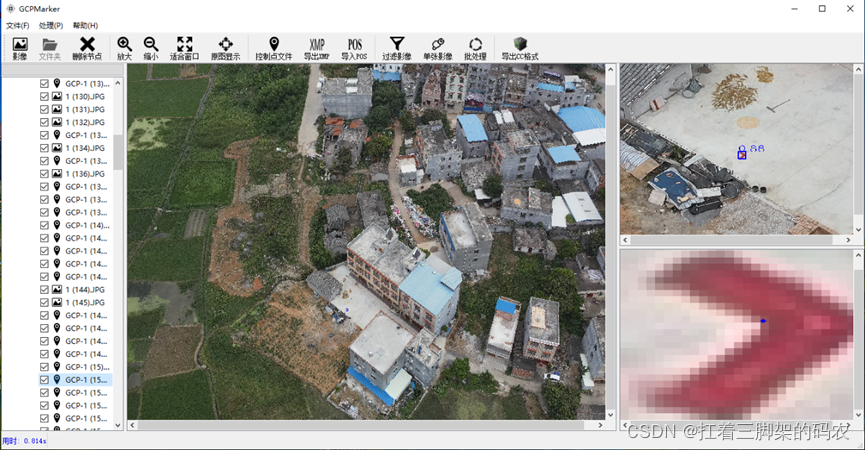
GCPMarker主界面由四部分构成,分别为菜单栏与工具栏、影像显示区、文件列表区及状态栏。
1.1 菜单栏及工具栏

此处放置各种功能按钮,在实际使用时可直接依次点击工具栏中的功能按钮即可。但是在开始操作前需先在设置界面中设置坐标系、模型选择等参数。设置按钮位于“文件”栏中,也可采用CTRL+S快捷键调用。
1.2 界面显示区
此处主要显示原始影像及刺点效果,左图显示原始影像,右上图显示像控点的概略范围及识别结果,右下图显示刺点结果。对于无法识别的像控点,右上图不会显示识别结果,右下图也不会更新。像控点刺点成功后,在左图会将像控点用蓝色圆圈标出。点击“放大”、“缩小”、“适合窗口”、“原图显示”等按钮可以调整视图,方便观察刺点效果。

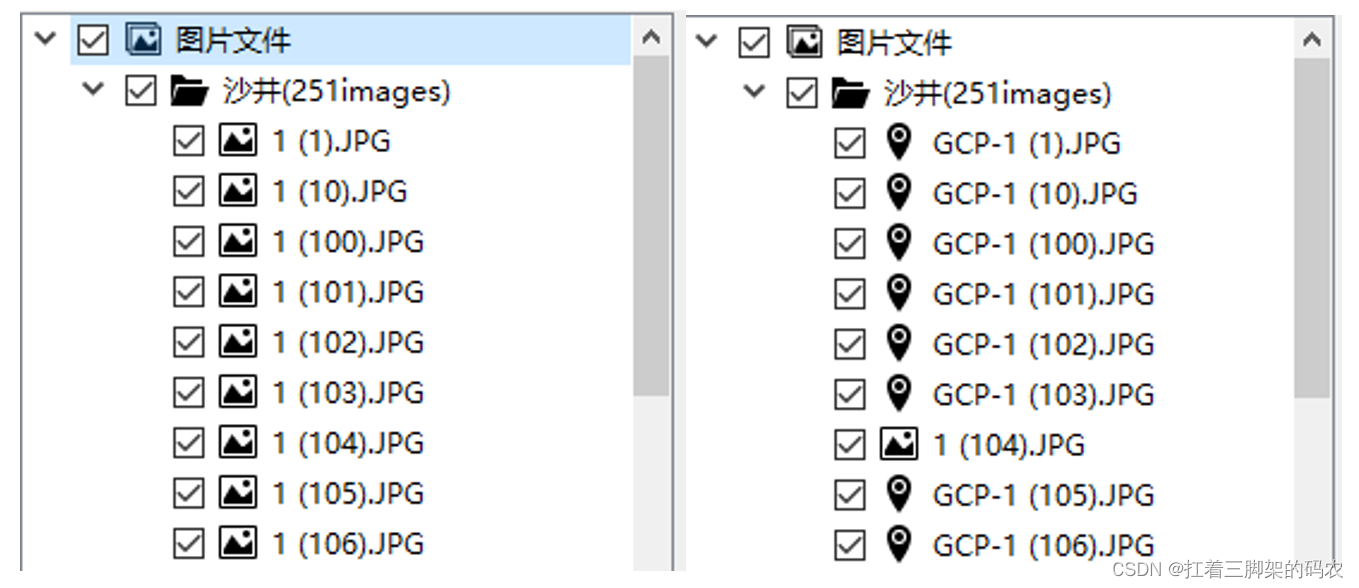
1.3 文件列表区
此处在导入文件夹后会显示文件夹及其路径下的文件名列表。对于包含像控点的影像会使用像控点图标进行标记,方便用户查看。若要删除某个文件夹,只需点击文件夹名称然后点击菜单栏上的“删除节点”按钮即可。建议一个项目只导入一个文件夹。
1.4 状态栏
状态栏主要显示一些状态信息,如处理时间、错误信息等。在进行批处理等操作时还会显示处理进度。
2 自动刺点流程
GCPMarker的自动刺点流程主要包括设置->文件夹导入->像控点导入->导出XMP或导入POS->过滤影像->批处理->导出为CC格式等。
2.1 设置
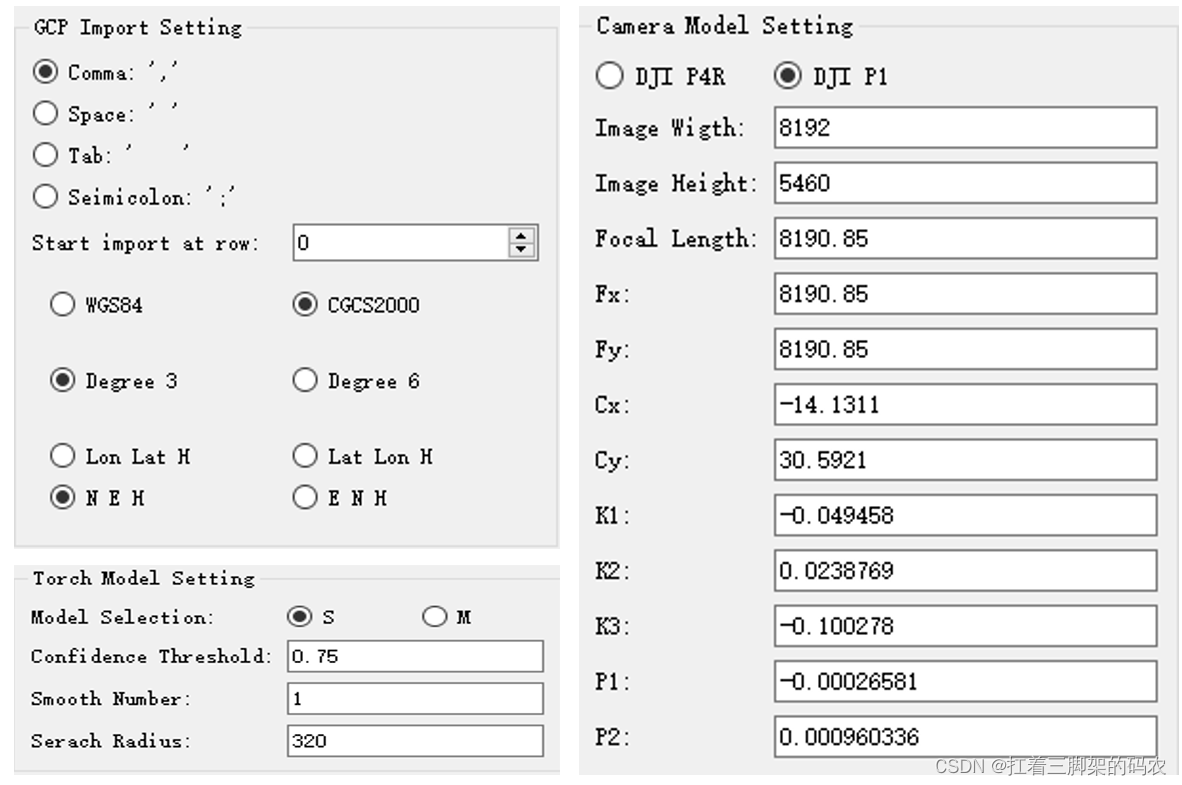
参数设置主要分为三大部分,分别为坐标系设置、像控点检测模型设置、相机模型设置。
2.1.1 坐标系设置
坐标系设置主要用于确定航测任务所要求的坐标系是WGS84还是CGCS2000,是3°投影还是6°投影。以及像控点文件的格式:采用哪种分隔符、大地坐标还是投影坐标、坐标顺序如何等。
(注意:在导入像控点之前必须先确认坐标系设置及像控点文件格式是否正确。建议像控点文件采用txt格式文本保存,并使用逗号进行分隔。且像控点坐标不能加带号。)
2.1.2 像控点检测模型设置
像控点模型设置的各个参数均保持默认即可,对于POS不准的影像可以适当调大Search Radius参数的值(如400),对于经过空三后导出的POS,可将该值设置较小(如80),能在一定程度上提高计算速度。Model Selection建议选择S,能够显著提高运算速度。
2.1.3 相机模型设置
此处主要针对采用“导出XMP”方式取得影像外方位元素的操作,且只适用于大疆精灵4RTK及M300RTK+P1镜头两种影像数据。在处理两类影像时注意选择P4R还是P1。对于P4R影像,软件会自动提取其XMP字段内的各种参数,无需设置相机参数。对于P1数据,其XMP字段内参数不全,需要手动输入相机参数。但是若采用“导入POS”数据而不是“导出XMP”的方式为影像赋予外方位元素,则无需对相机模型进行设置。
2.2 导入文件夹
建议将一个项目内的影像放在同一文件中方便导入。若有多个文件夹,则不同文件夹内影像命名不宜相同。在导入时,导入影像根目录。导入后就会在软件左侧显示影像列表。单击列表中的任意影像可对其进行查看。若文件夹导入错误,则点击文件夹,然后点击工具栏上的“删除节点”按钮进行删除,之前导入的像控点数据也会随之清空。因此,文件夹重新导入后需重新导入像控点文件。
2.3 导入像控点文件
将像控点文件按照要求格式组织起来,保存为txt文本,最好用逗号分隔,且坐标不能加带号。导入前注意检查设置中的像控点坐标格式及坐标系选择是否与其本身一致。
2.4 导出XMP或导入POS
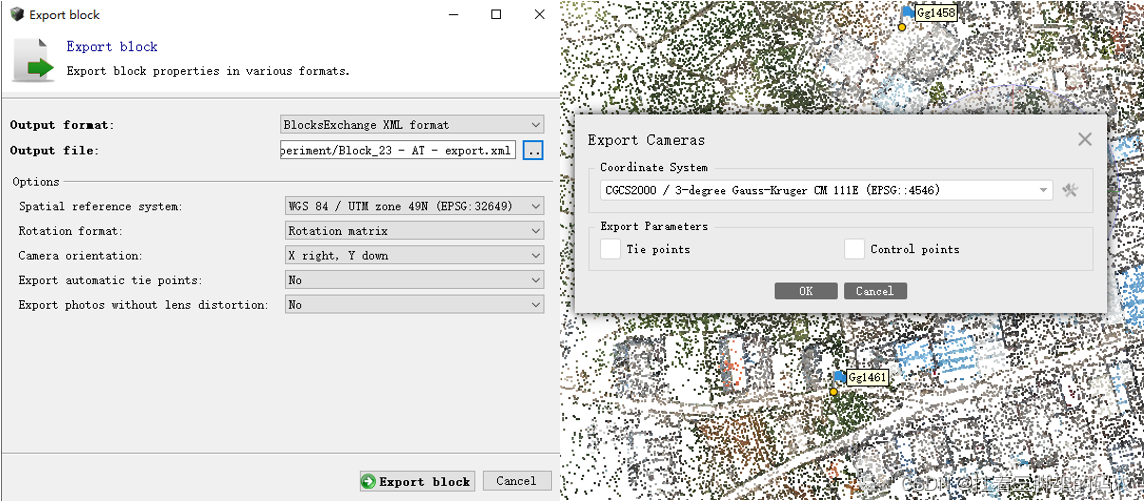
自动刺点需要影像的外方位元素才能进行。而对于大疆P4R或P1影像,其外方位元素保存在影像的XMP字段中,可以采用“导出XMP”的方式为影像赋予外方位元素。但是其精度较差,根据共线方程预测的像控点影像区域不准确,甚至有可能所预测的像控点区域呢没有像控点存在。对于倾斜影像或风力较大时所拍摄的影像,此现象尤为突出。此外,对于其它相机所拍摄的影像,由于其外方位元素记录格式不统一,无法使用“导出XMP”的方式得到外方位元素。
为了获取更为精确的影像外方位元素及相机内方位元素和畸变参数,可以使用PhotoScan(Metashape)或ContextCapture软件先进行一次低精度的空三,然后将空三结果导出为Block Exchange (.xml)格式,点击工具栏中的“导入POS”按钮将其导入到GCPMarker中后,即可为影像赋予精确的外方位元素。
2.5 过滤影像
点击工具栏中的“过滤影像”按钮,即可挑选出含有像控点的影像进行后续处理。影像过滤完毕后左侧影像文件图标会发生变化,文件名则会增加GCP前缀。在源文件夹下也会生成名为“gcpimages.txt”的文件。
2.6 批处理
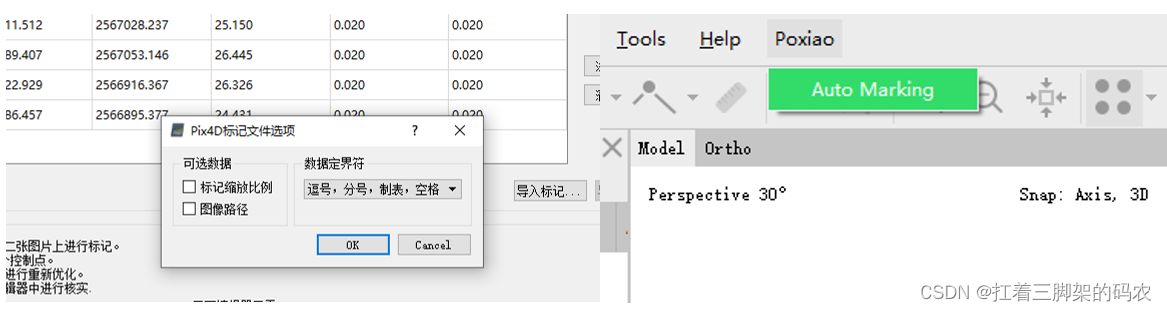
点击工具栏中的“批处理”按钮即可进行批量自动刺点。但是在批处理之前最好先对部分影像进行单张处理,检查是否能够得到正确的刺点结果。部分影像由于遮挡,无法检测到像控点目标,属于正常情况,多试几张影像即可。批处理完成后,在源文件夹下会生成“markerResults.txt”文件,里面记录了自动刺点的结果。该文件可直接导入到Pix4D软件中,配合我们自己编写的Metashape自动刺点模块,也可直接导入到Metashape软件中。
2.7 导出为CC格式
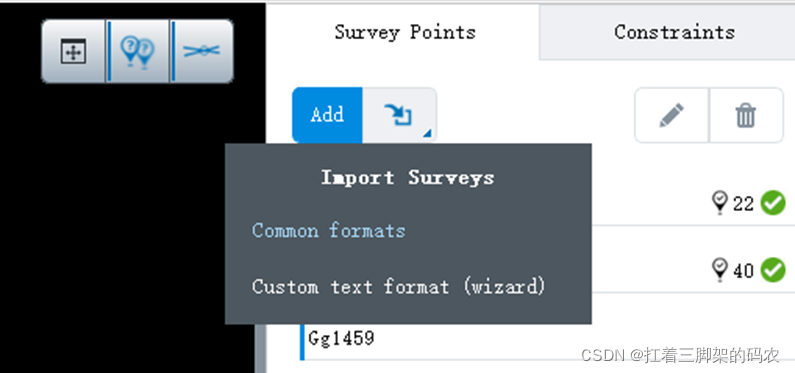
点击工具栏中的“导出CC格式”按钮,即可将刺点结果导出为ContextCapture格式的surveysData,在源文件夹下会生成一个名为“ContextCapture SurveysData.xml”的文件,将其直接导入CC即可完成自动刺点。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









