









在OpenCV中,可以很方便的得到Hu不变距,Hu矩在图像旋转、缩放、平移等操作后,仍能保持矩的不变性,所以有时候用Hu不变距更能识别图像的特征。
Hu矩由于具有尺度、旋转、平移不变性,可以用来做匹配。
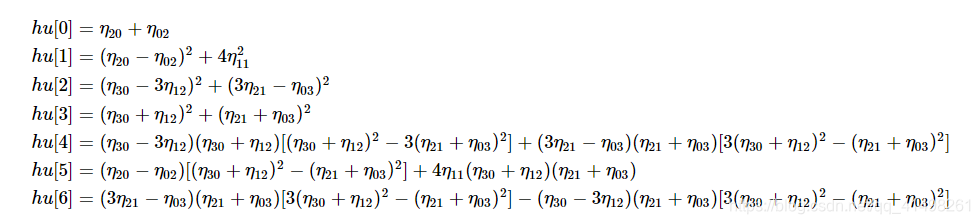
Hu不变矩主要是利用归一化中心矩构造了7个不变特征矩,由二阶矩和三阶矩可以导出7个不变矩:

opencv中计算Hu矩函数
- 说明
该函数计算7个Hu不变量。
这些值被证明对图像比例,旋转和反射是不变的,但第七个值因反射而改变。这种不变性是在无限图像分辨率的假设下证明的。对于光栅图像,原始图像和变换后图像的计算出的Hu不变量有些不同。 - 声明
CV_EXPORTS void HuMoments( const Moments& moments, // double hu[7] );//输出Hu不变量 /** @overload */ CV_EXPORTS_W void HuMoments( const Moments& m, OutputArray hu );
匹配形状的距离
OpenCV提供了一个名为matchShapes的函数,它接收两个图像(或轮廓)并使用Hu Moments找到它们之间的距离。 所以,不必在自己计算hu 矩。 只需将图像二值化并使用matchShapes。
-
说明
函数比较两个形状,3个被实现的方法都使用hu 不变量。 -
声明
double matchShapes( InputArray contour1,//第一张轮廓或者灰度图像 InputArray contour2,//第二张轮廓或灰度图像 int method, //比较方法 double parameter //特定方法的参数,目前不支持 ); -
method 参数
enum ShapeMatchModes { CONTOURS_MATCH_I1 =1, CONTOURS_MATCH_I2 =2, CONTOURS_MATCH_I3 =3 };令 D ( A , B ) D(A,B) D(A,B)为形状A和B之间的距离,并且 H i A H_i^A HiA和 H i B H_i^B HiB为形状A和B的对数变换的Hu矩。定义对应于三种情况的距离:
1.CONTOURS_MATCH_I1
D ( A , B ) = ∑ i = 0 6 ∣ 1 H i B − 1 H i A ∣ D(A,B)=\sum_{i=0}^6 |\frac{1}{H_i^B}-\frac{1}{H_i^A}| D(A,B)=i=0∑6∣HiB1−HiA1∣
2.CONTOURS_MATCH_I2 =2
D ( A , B ) = ∑ i = 0 6 ∣ H i B − H i A ∣ D(A,B)=\sum_{i=0}^6 |H_i^B -H_i^A| D(A,B)=i=0∑6∣HiB−HiA∣
3.CONTOURS_MATCH_I3 =3
D ( A , B ) = ∑ i = 0 6 ∣ H i A − H i B ∣ ∣ H i A ∣ D(A,B)=\sum_{i=0}^6 \frac{|H_i^A-H_i^B|}{|H_i^A|} D(A,B)=i=0∑6∣HiA∣∣HiA−HiB∣
举例
void getHuMoments(Mat &src1,Mat &src2){
//1.转化为灰度图像
Mat gray1, binary1, dst1;
Mat gray2, binary2, dst2;
cvtColor(src1, gray1, COLOR_BGR2GRAY);
cvtColor(src2, gray2, COLOR_BGR2GRAY);
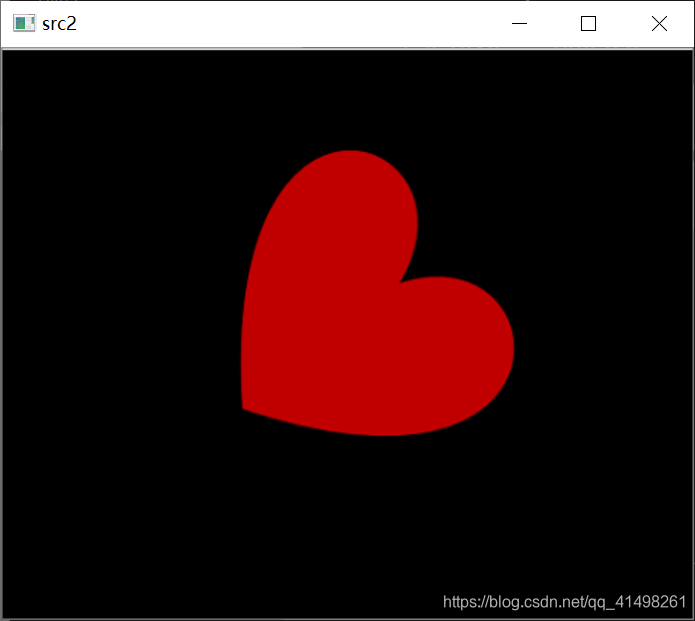
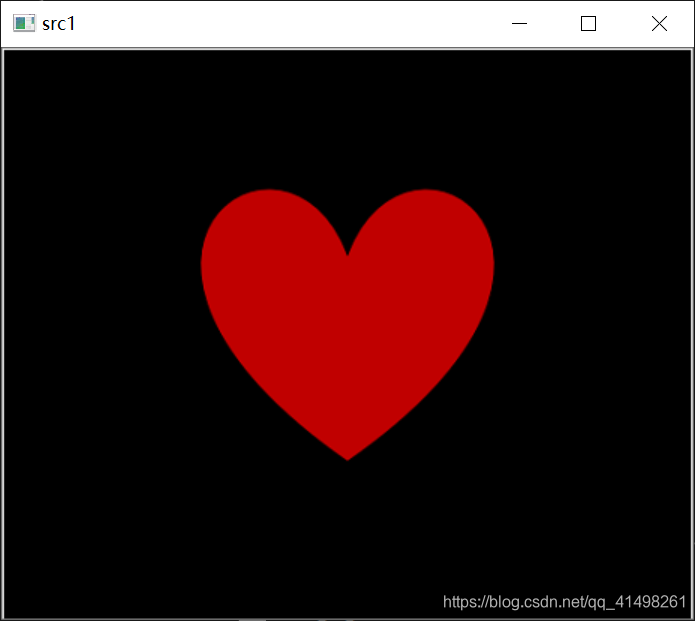
imshow("src1", src1);
imshow("src2", src2);
//2.二值化
threshold(gray1, binary1, 127, 255, THRESH_BINARY | THRESH_OTSU);
imshow("binary1", binary1);
threshold(gray2, binary2, 127, 255, THRESH_BINARY | THRESH_OTSU);
imshow("binary2", binary2);
//3.计算hu矩
Moments ms1,ms2;
ms1 = moments(binary1, false);
ms2 = moments(binary2, false);
double hu1[7],hu2[7];
HuMoments(ms1, hu1);
HuMoments(ms2, hu2);
//4.log转化
cout << endl << endl;
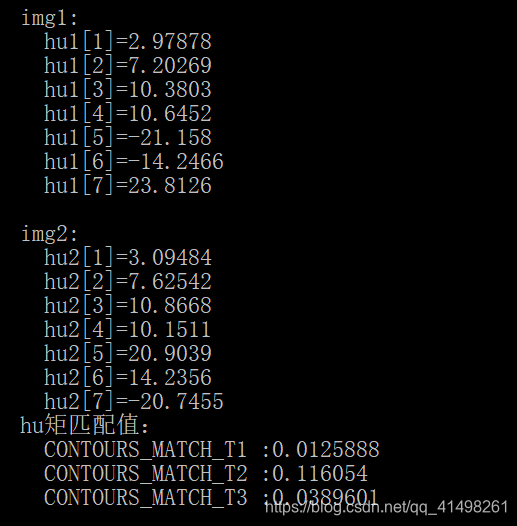
cout << " img1:" << endl;
for (size_t i = 0; i < 7; i++)
{
hu1[i] = -1 * copysign(1.0, hu1[i]) * log10(abs(hu1[i]));
cout << " hu1[" << i+1 << "]=" << hu1[i] << endl;
}
cout << endl;
cout << " img2:" << endl;
for (size_t i = 0; i < 7; i++)
{
hu2[i] = -1 * copysign(1.0, hu2[i]) * log10(abs(hu2[i]));
cout << " hu2[" << i+1 << "]=" << hu2[i] << endl;
}
//5.形状匹配
double d1 = matchShapes(binary1, binary2, CONTOURS_MATCH_I1, 0);
double d2 = matchShapes(binary1, binary2, CONTOURS_MATCH_I2, 0);
double d3 = matchShapes(binary1, binary2, CONTOURS_MATCH_I3, 0);
cout << " hu矩匹配值:" << endl;
cout << " CONTOURS_MATCH_T1 :" << d1 << endl;
cout << " CONTOURS_MATCH_T2 :" << d2 << endl;
cout << " CONTOURS_MATCH_T3 :" << d3 << endl;
}
int main() {
//Mat src = imread("D:/test/huahua.png");
Mat src1 = imread("D:/test/s1.png");
Mat src2 = imread("D:/test/s3.png");
if (src1.empty()||src2.empty()) {
cout << " input the image error!" << endl;
}
getHuMoments(src1, src2);
waitKey(0);
return 0;
}
-
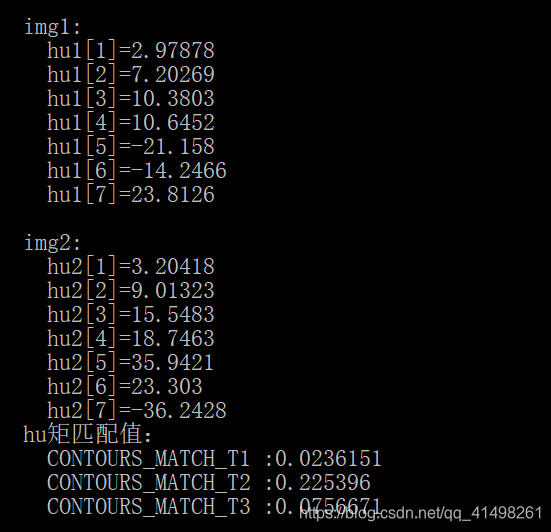
匹配旋转的图像的结果:

-
匹配同一张图片的效果:
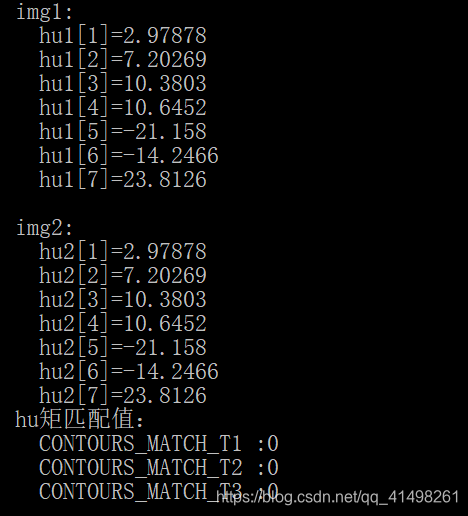
-
匹配两张完全不同的图形:

学习:
图像特征:几何不变矩–Hu矩
[学习OpenCV]Moment矩,Hu不变矩,轮廓匹配/形状匹配 -1


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









