







TI毫米波雷达概述
1.TI毫米波雷达传感器芯片及分类:
在TI的官方网站上可以看到,总体上,TI毫米波雷达的定位是用于工业和汽车领域的毫米波雷达传感器,分别为IWR系列和AWR系列,这样分的目的是针对不同的领域做了不同的设计和优化,比如通信方式由于汽车内部一般为CAN通信,所以AWR系列的雷达一般有CAN接口,二者的温度范围也不相同。
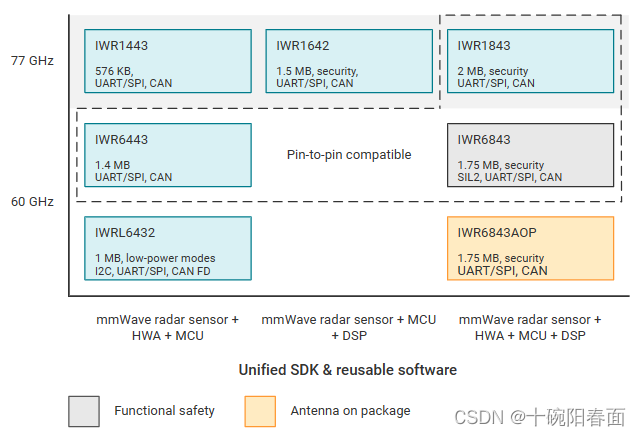
1.1 工业毫米波雷达传感器
器件选型
工业毫米波雷达传感器的内容,下面列举了德州仪器所有的工业毫米波IWRxx系列传感器,传感器分60GHz和77GHz,不同型号内部有不同的芯片组合对应不同的算力,也对应不同的外设,这部分内容在前期器件选型的时候可以用到。
应用场景
工业毫米波雷达的应用场景,这里面有TI的工程师面向典型的应用场景总结的原理资料、程序代码和参考案例提供。

工业毫米波雷达的应用场景有
- 室内人员计数、检测、跟踪等,比如在设计军事、国安的一些场景中,不方便采集人脸,就可以用雷达进行检测。
- 生命体征检测,例如最常见的呼吸心跳就可以用毫米波雷达实现。
- 工业机器人,例如厂区机械臂时急停检测避免人员伤亡的场景,物流机器人目标识别等。
- 液位监测,例如油罐、水箱等检测场景、河流灌渠水位监测、闸门控制系统等。
- 交通领域 ,车辆计数、夜间速度监测、智能交通等。
- 个人电子产品,人员轨迹跟踪、目标检测、、穿戴设备等。
上诉场景如果有做的方向是和TI提供的方向相似的地方,那么建议多看看里面官方提供的资料,里面提供了比较丰富的内容,说不定会有帮助。
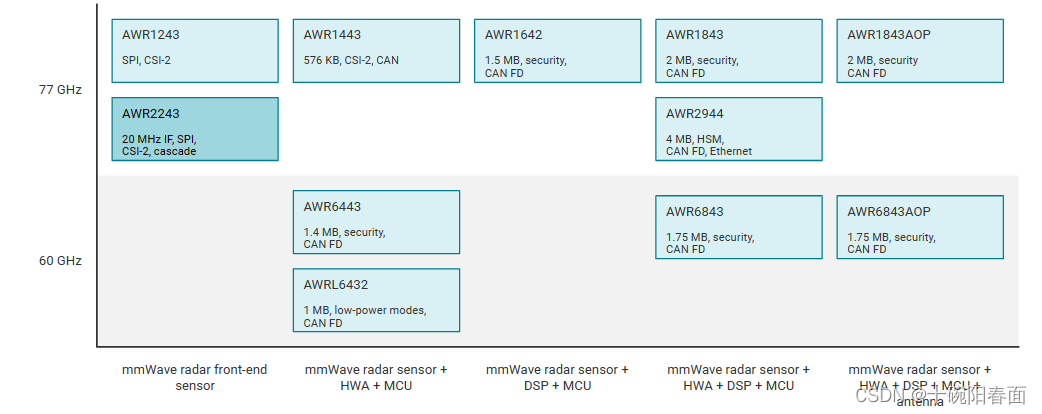
1.2 汽车毫米波雷达
选型
下面列举了德州仪器所有的汽车毫米波AWRxx系列传感器,传感器同样分60GHz和77GHz,不同型号内部有不同的芯片组合对应不同的算力,也对应不同的外设,同样在器件选型是可以作为参考。
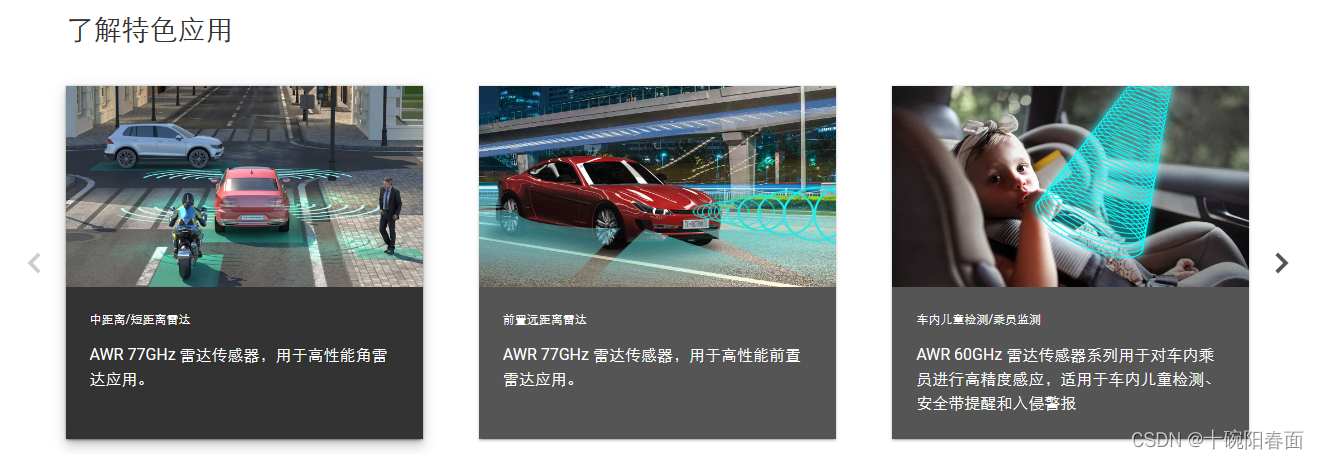
使用场景
TI汽车毫米波雷达传感器主要应用在汽车辅助驾驶领域。常见的应用包括: 盲区检测、辅助制动、辅助变道、车内乘员检测、车内人员生命体征检测、手势识别、自动泊车等领域,车内人员生命体征检测这样的应用和工业雷达人员生命体征检测没有区别,因此汽车和工业毫米波雷达是认为划分的,并非互斥,他们之间有一定的交集。
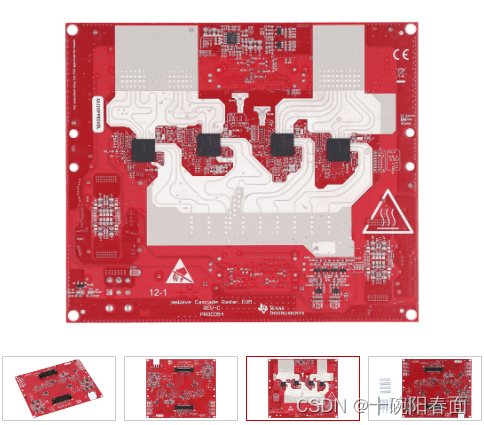
1.3 基于AWR2243 的 TI 级联雷达 :
这款雷达EVM板是偶然在TI官方网站上发现的,基于AWR2243雷达芯片做的级联款。使用这款级联雷达可以做高分辨率角度检测。
用于做角度超分辨的级联雷达链接
级联雷达EVM板用户手册
1.4 不喜欢看文字的也可以戳视频->
TI毫米波雷达芯片、板卡及应用场景分析
2. TI软件入门概述:
TI所有的软件安装路径选择默认路径!
2.1 TI RadarToolbox
主要功能
雷达工具箱,根据第1节提到的分类结果,毫米波雷达芯片分为工业毫米波雷达传感器和汽车毫米波雷达传感器,因此雷达工具箱也分为Automotive Toolbox(汽车雷达工具箱) 和 Industrial Toolbox 两个工具箱,对应TI不同定位的雷达,但很多时候是通用的。现在统一叫Radar Toolbox,把两个工具箱的内容进行了整合,但是原来的内容还在,只会多不会少,只是放到了不同的文件夹下面。
ToolBox是TI针对雷达不同的应用场景推出的资料合集,内部提供了针对不同应用的例程。我们在第一节提到的几乎所有的应用场景都可以在ToolBox中找到源代码。我这里用的旧版的Toolbox,举个例子说明Toolbox的功能及使用方法。
一般情况下,芯片厂家在做出一款全新的芯片后都会提供厂家写好的例程。因为芯片比较小众,并没有太多的资料,提供例程是一种快速对芯片做二次开发的方法,通过官方的例程不仅能够实现一部分代码的复用,而且通过读代码能够对芯片的驱动和工作流程有更好的把握。
这里我使用的是(mmwave_industrial_toolbox_4_12_0)版本,在其Labs文件夹下面能够看到针对不同应用场景的文件夹,这些文件夹很大程度上和上述工业毫米波雷达传感器典型应用相互对应,不同的文件夹下面对应不同的例程。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 5691
5691

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











