







在当今信息化社会,应急通信保障已成为各类救援任务中不可或缺的一环。尤其在复杂多变的应急救援现场,如何确保通信畅通、信息传递及时,直接关系到救援行动的成败。近年来,多链路聚合通信设备以其独特的优势,逐渐在应急救援领域崭露头角,成为保障通信畅通的重要工具。
多链路聚合通信设备,顾名思义,就是能够同时聚合多个网络链路的通信设备。它具备多网络接入融合能力,如4G/5G、专网、卫星网、宽带自组网、WiFi等,实现多种网络资源的有效整合。在应急救援现场,这种设备能够迅速建立现场音视频融合通信指挥系统,搭建现场宽、窄带通信网络,为救援行动提供稳定、安全、高带宽的网络接入服务及高清视频传输。
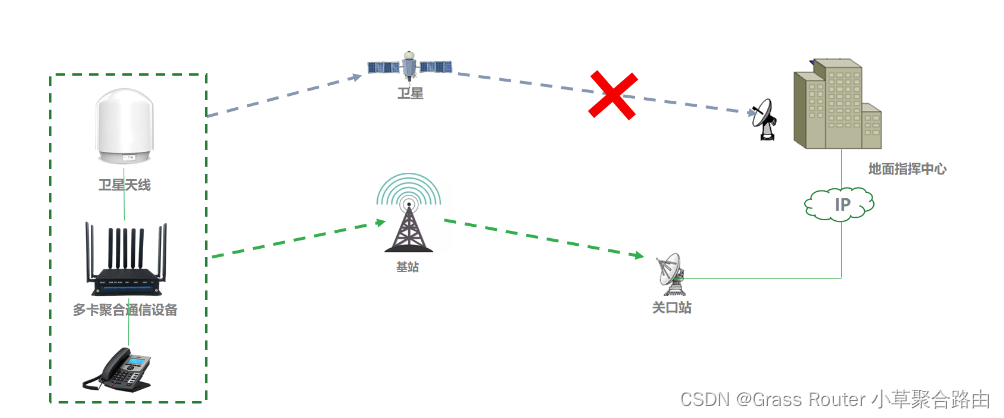
在应急救援实施中,多链路聚合通信设备的应用具有显著优势。首先,它解决了传统单通道信号弱、上传带宽不够、信号不稳定等问题。通过将多条运营商的带宽聚合叠加成一路,大大提高了通信速度和网络容量,确保了救援现场的信息传递及时、准确。
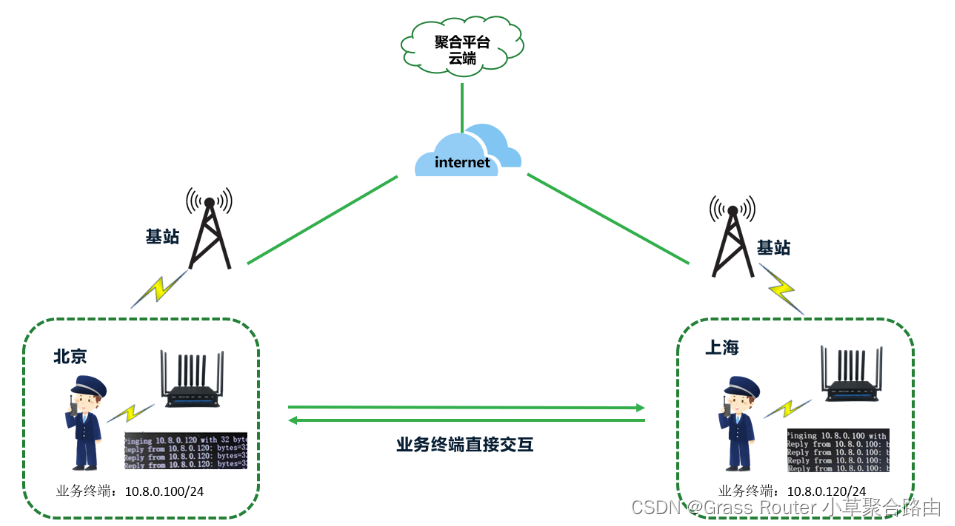
其次,多链路聚合通信设备支持自建服务器和聚合需要云服务器,可根据客户的网络环境进行适配,提供最佳的通信效果。这意味着在救援现场,即使面临复杂的网络环境,也能通过多链路聚合通信设备实现高效、稳定的通信。
此外,多链路聚合通信设备还具有防护等级高、单电池可连续工作时间长等特点。在恶劣的救援环境中,它能够确保设备的稳定运行,为救援行动
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 813
813

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









