







当当当当!我们可爱的小L又㕛叒叕来了
这次我们来学习一个看起来很难实际上也很难的东东:凸包问题
1.基本概念
如果你愿意看高深(看不懂)的方法讲解的话,出门左拐百度
那么还好你没有拐,小L决定来讲解一番
(准备好你的小本本和笔 还有鲜花和掌声 )
(为了让所有人都能看懂这篇文章,我就用了普通人理解和大佬理解QWQ)
普通人理解:
青青草原上有一些树,
现在要求用一个绳子(绳子无限长)
把一些树围起来,组成一个凸多边形(意思就是说所有点都必须往外伸展,不能向里边连接)
求这个绳子最长需要多长/求这个多边形最大面积
大佬理解:
给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边形,它能包含点集中所有的点
(注:点集的意思就是把一些点的坐标/名称放在一个大箱子里)
百度理解:
对于一个集合D,D中任意有限个点的凸组合的全体称为D的凸包。
还不懂的请看图:

其中,红点就是树,绿线就是绳子,或者有人喜欢叫他们橡皮筋
平面求法(长度)
百度:
水平法
从最左边的点开始,按斜率递增的方法,求出凸包上部;再按斜率递减的方法,求出凸包下部。水平法较中心法减少了斜率无限大的可能,减少了代码的复杂度。
快包法
选择最左、最右、最上、最下的点,它们必组成一个凸四边形(或三角形)。这个四边形内的点必定不在凸包上。然后将其余的点按最接近的边分成四部分,再进行快包法(QuickHull)。
额意思就是说:
水平法=>从左往右找点,然后判断出凸包的最上面的点,然后求出最下面的点
快包发=>把上下左右的点连接起来,然后找他们最近的点进行连接,然后把上下左右的点连接起来,然后找他们最近的点进行连接,把上下左右的点连接起来,然后找他们最近的点进行连接,把上下左右的点连接起来,然后找他们最近的点进行连接……一直到结束
大佬讲解:
(原文链接)
Graham扫描法
时间复杂度:O(n㏒n)
思路:Graham扫描的思想是先找到凸包上的一个点,然后从那个点开始按逆时针方向逐个找凸包上的点,实际上就是进行极角排序,然后对其查询使用。
这里写图片描述
步骤:
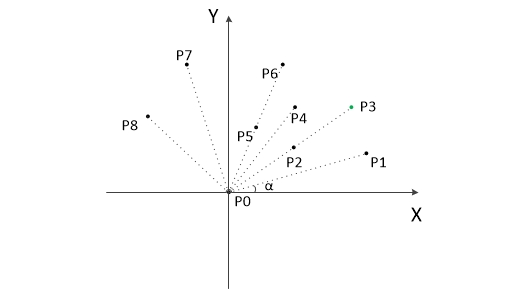
把所有点放在二维坐标系中,则纵坐标最小的点一定是凸包上的点,如图中的P0。
把所有点的坐标平移一下,使 P0 作为原点,如上图。
计算各个点相对于 P0 的幅角 α ,按从小到大的顺序对各个点排序。当 α 相同时,距离 P0 比较近的排在前面。例如上图得到的结果为 P1,P2,P3,P4,P5,P6,P7,P8。我们由几何知识可以知道,结果中第一个点 P1 和最后一个点 P8 一定是凸包上的点。
(以上是准备步骤,以下开始求凸包)
以上,我们已经知道了凸包上的第一个点 P0 和第二个点 P1,我们把它们放在栈里面。现在从步骤3求得的那个结果里,把 P1 后面的那个点拿出来做当前点,即 P2 。接下来开始找第三个点:
连接P0和栈顶的那个点,得到直线 L 。看当前点是在直线 L 的右边还是左边。如果在直线的右边就执行步骤5;如果在直线上,或者在直线的左边就执行步骤6。
如果在右边,则栈顶的那个元素不是凸包上的点,把栈顶元素出栈。执行步骤4。
当前点是凸包上的点,把它压入栈,执行步骤7。
检查当前的点 P2 是不是步骤3那个结果的最后一个元素。是最后一个元素的话就结束。如果不是的话就把 P2 后面那个点做当前点,返回步骤4。
最后,栈中的元素就是凸包上的点了。
以下为用Graham扫描法动态求解的过程:
代码(看不懂不看)
Graham扫描:
#include<iostream>
#include<cstdio>
#include<cstring>
#include<algorithm>
#include<cmath>
#define PI 3.1415926535
using namespace std;
struct node
{
int x,y;
};
node vex[1000];//存入的所有的点
node stackk[1000];//凸包中所有的点
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 274
274

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









