







梯度下降优缺点参考博客
本文仅代表个人观点,才疏学浅,欢迎指正。
数学分析
复习以下高等数学中梯度的相关知识:
z
=
f
(
x
,
y
)
=
1
a
x
2
+
b
y
2
(1)
z=f(x,y)=\frac{1}{ax^2+by^2}\tag{1}
z=f(x,y)=ax2+by21(1)
∂ f ∂ x = − 2 a x ( a x 2 + b y 2 ) 2 (2) \frac{\partial f}{\partial x}=-\frac{2ax}{(ax^2+by^2)^2}\tag{2} ∂x∂f=−(ax2+by2)22ax(2)
∂ f ∂ y = − 2 b y ( a x 2 + b y 2 ) 2 (3) \frac{\partial f}{\partial y}=-\frac{2by}{(ax^2+by^2)^2}\tag{3} ∂y∂f=−(ax2+by2)22by(3)
g r a d z = − 2 a x ( a x 2 + b y 2 ) 2 i + − 2 b y ( a x 2 + b y 2 ) 2 j (4) grad{\,}z=-\frac{2ax}{(ax^2+by^2)^2}i+-\frac{2by}{(ax^2+by^2)^2}j\tag{4} gradz=−(ax2+by2)22axi+−(ax2+by2)22byj(4)
在公式1中,a、b为常量,x、y为变量。公式2、公式3为公式1的偏导数,公式4为公式1的梯度。公式1在三维空间中为一个漏斗形曲面,越靠近(0, 0)值越小。grad z为曲面上各个位置函数值下降最快的方向,有两个分量均为(x, y)的函数。
- 当(a, b) = (1, 1)时
g r a d z = − 2 x ( x 2 + y 2 ) 2 i + − 2 y ( x 2 + y 2 ) 2 j (5) grad{\,}z=-\frac{2x}{(x^2+y^2)^2}i+-\frac{2y}{(x^2+y^2)^2}j\tag{5} gradz=−(x2+y2)22xi+−(x2+y2)22yj(5)
(x, y) = (1, 2),
g r a d z = − 2 25 i + − 4 25 j (6) grad{\,}z=-\frac{2}{25}i+-\frac{4}{25}j\tag{6} gradz=−252i+−254j(6)
即点(1, 2)位置函数值下降最快的方向为(-2/25, -4/25)。
(x, y) = (3, 4),
g
r
a
d
z
=
−
6
625
i
+
−
8
625
j
(7)
grad{\,}z=-\frac{6}{625}i+-\frac{8}{625}j\tag{7}
gradz=−6256i+−6258j(7)
-
当(a, b) = (2, 2)时
g r a d z = − 4 x ( 2 x 2 + 2 y 2 ) 2 i + − 4 y ( 2 x 2 + 2 y 2 ) 2 j (8) grad{\,}z=-\frac{4x}{(2x^2+2y^2)^2}i+-\frac{4y}{(2x^2+2y^2)^2}j\tag{8} gradz=−(2x2+2y2)24xi+−(2x2+2y2)24yj(8)
(x, y) = (1, 2),
g r a d z = − 2 100 i + − 4 100 j (9) grad{\,}z=-\frac{2}{100}i+-\frac{4}{100}j\tag{9} gradz=−1002i+−1004j(9)
(x, y) = (3, 4),
g r a d z = − 12 2500 i + − 16 2500 j (10) grad{\,}z=-\frac{12}{2500}i+-\frac{16}{2500}j\tag{10} gradz=−250012i+−250016j(10) -
总结
从1. 2. 中可以看出,z上的不同点,其函数值下降最快的方向是不同的,其梯度为(x, y)的函数。
对于不同的(a, b),同样的位置(x, y)函数值下降最快的方向也是不同的。
以公式(6)为例,点(1, 2)位置函数值下降最快的方向为(-2/25, -4/25),如果想要降低函数值,在此点处可以向梯度方向走一定的距离,例如,选取0.1倍的梯度,即从位置(1, 2)移动到(1, 2) + 0.1 * (-2/25, -4/25) = (0.92, 1.84)
类比
将数学分析类比到深度学习模型:
输入数据为(a, b);模型只有1层,参数为x, y;损失函数z为包含a,b,x,y的函数;(模型输出应该也为包含a,b,x,y的函数,但不予考虑)
训练目的即降低损失函数z的值,采用梯度下降法。
这里类比的根据为输入数据(a, b)值不可变;模型对输入数据进行相应运算并输出,相应运算即包含不同的参数,这些参数变量会在训练的过程中不断的更新;根据输出和GT值定义损失函数,损失函数为与 输入值和参数值 相关的函数(函数z)。
梯度下降法有 批量梯度下降法(BGD)、随机梯度下降法(SGD)和小批量梯度下降法(MBGD)三种,其区别的本质在于损失函数定义的区别:
1) 数学分析中所使用的是SGD,其每次迭代使用一个样本对参数进行更新,即每输入一个确定值(a0, b0),损失函数及其偏导则成为(x, y)的函数,对当前的(x, y)值沿梯度方向更新即可。类比中提到的0.1倍梯度,为更新的幅度,称为学习率。
2) BGD的损失函数定义,每次迭代使用所有样本对参数进行更新,对所以样本的损失求一个平均值,假设我们一共有3个样本(a0, b0),(a1, b1),(a2, b2),损失函数将定义为
z
=
1
a
0
x
2
+
b
0
y
2
+
1
a
1
x
2
+
b
1
y
2
+
1
a
2
x
2
+
b
2
y
2
3
z=\frac{\frac{1}{a_0x^2+b_0y^2}+\frac{1}{a_1x^2+b_1y^2}+\frac{1}{a_2x^2+b_2y^2}}{3}
z=3a0x2+b0y21+a1x2+b1y21+a2x2+b2y21
接下来,对该公式进行求梯度,然后对当前的(x, y)值沿梯度方向更新即可。
3)MBGD的损失函数定义,每次迭代使用一部分样本对参数进行更新,对这部分样本的损失求一个平均值,假设我们拿出3个样本(a0, b0),(a1, b1),(a2, b2),损失函数将定义为
z
=
1
a
0
x
2
+
b
0
y
2
+
1
a
1
x
2
+
b
1
y
2
+
1
a
2
x
2
+
b
2
y
2
3
z=\frac{\frac{1}{a_0x^2+b_0y^2}+\frac{1}{a_1x^2+b_1y^2}+\frac{1}{a_2x^2+b_2y^2}}{3}
z=3a0x2+b0y21+a1x2+b1y21+a2x2+b2y21
接下来,对改公式进行求梯度,然后对当前的(x, y)值沿梯度方向更新即可。
链式求导法则
数学分析和类比中所提及的是网络模型极其简单的情况,将其推广到一般情况为:
输入为x,其可能为向量或者矩阵;
多层网络,每层将对上一层的输出进行操作,可以看做函数嵌套过程,第一层f(x),第二层g(f(x)),第三层t(g(f(x))),…,每一层函数都包含大量的参数,例如g(.)层参数为g0,g1,…gm;
损失函数为与x和各层参数相关的函数;
根据嵌套函数的链式求导法则,可以求得损失函数对于某一层所有参数的偏导,以及对该层参数的梯度,下面的操作则与数学分析和类比中类似,将该层的参数向着其梯度的方向更新即可。对于一次的数据输入,先对后面的层求梯度,更新,然后不断向前,直至对第一层进行求梯度,参数更新。
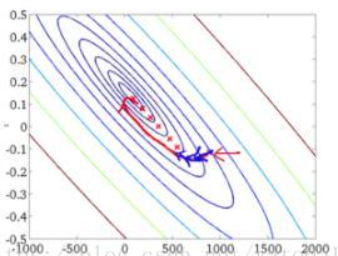
动量法(momentum)
- 动量法用过去梯度的平均值来替换梯度,这大大加快了收敛速度。
- 对于无噪声梯度下降和嘈杂随机梯度下降,动量法都是可取的。
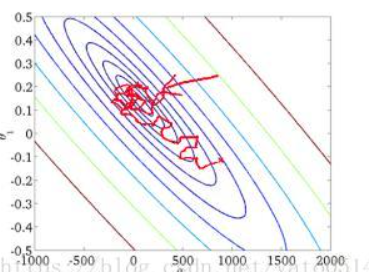
- 动量法可以防止在随机梯度下降的优化过程停滞的问题。
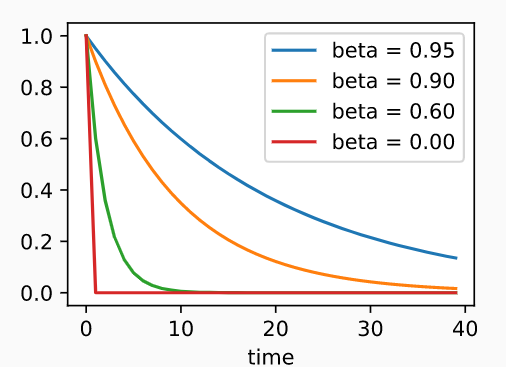
- 由于对过去的数据进行了指数降权,有效梯度数为\frac{1}{1-\beta}。
- 在凸二次问题中,可以对动量法进行明确而详细的分析。
- 动量法的实现非常简单,但它需要我们存储额外的状态向量(动量v)。
总之,其用来加快使用梯度下降法优化过程中的收敛速度(一般取\beta为0.9)
$$
v_t\leftarrow\beta v_{t-1}+g_{t,t-1}\
x_t\leftarrow x_{t-1}-\eta_tv_t\
若\beta=0,则为普通的梯度下降法(即只使用该次的梯度g_{t,t-1}来更新)(\eta为学习率)\
\合起来为:\
x_t\leftarrow x_{t-1}-\eta_t \sum_{\tau=0}{t-1}\beta{\tau}g_{t-\tau,t-\tau-1}\
即:将之前每次的梯度进行了加权和,本次梯度权重为1,早一次乘一个\beta
$$
time0为本次的权重,time向后1即早一次,下图为加权和中每次梯度的权重,可以看到越早则梯度权重越小。beta为0时仅time0时有权重1,即普通的不使用动量的梯度下降法只使用本次的梯度来更新。
权重衰减
- 正则化是处理过拟合的常用方法:在训练集的损失函数中加入惩罚项,以降低学习到的模型的复杂度。
- 保持模型简单的一个特别的选择是使用L2惩罚的权重衰减。这会导致学习算法更新步骤中的权重衰减。
- 权重衰减功能在深度学习框架的优化器中提供。
- 在同一训练代码实现中,不同的参数集可以有不同的更新行为。
总之,其用来防止过拟合(一般取\lambda为1e-4)。
(一般来说,模型越大所需要的训练数据越多,否则将会出现过拟合,防止过拟合的直接方法是收集更多的训练数据,但显然这实际上是操作困难的)
使用L2范数的一个原因是它对权重向量的大分量施加了巨大的惩罚,这使得我们的学习算法偏向于在大量特征上均匀分布权重的模型。例如线性回归的例子:
f
(
x
)
=
w
T
x
+
b
损失函数
L
(
w
,
b
)
=
1
n
∑
i
=
1
n
1
2
(
w
T
x
(
i
)
+
b
−
y
(
i
)
)
2
为权重
w
添加罚项,即将损失函数设置为
L
(
w
,
b
)
+
λ
2
∣
∣
w
∣
∣
2
这样当最小化损失时,将同时试图缩小
w
至
0
,使得
w
中各分量分布更均匀,此即为权重衰减
(此处仅为示例,实际可以为任意
w
、
b
或其他权重使用权重衰减)
f(x)=w^Tx+b\\ 损失函数L(w,b)=\frac{1}{n}\sum_{i=1}^{n}\frac{1}{2}(w^Tx^{(i)}+b-y^{(i)})^2\\ 为权重w添加罚项,即将损失函数设置为L(w,b)+\frac{\lambda}{2}||w||^2\\ 这样当最小化损失时,将同时试图缩小w至0,使得w中各分量分布更均匀,此即为权重衰减\\ (此处仅为示例,实际可以为任意w、b或其他权重使用权重衰减)
f(x)=wTx+b损失函数L(w,b)=n1i=1∑n21(wTx(i)+b−y(i))2为权重w添加罚项,即将损失函数设置为L(w,b)+2λ∣∣w∣∣2这样当最小化损失时,将同时试图缩小w至0,使得w中各分量分布更均匀,此即为权重衰减(此处仅为示例,实际可以为任意w、b或其他权重使用权重衰减)
BGD
# PyTorch
# 设置batch_size大小为测试集大小
torch.optim.SGD(params, lr=<required parameter>, momentum=0, weight_decay=0)
优点:
(1)一次迭代是对所有样本进行计算,此时利用矩阵进行操作,实现了并行。
(2)由全数据集确定的方向能够更好地代表样本总体,从而更准确地朝向极值所在的方向。当目标函数为凸函数时,BGD一定能够得到全局最优。
缺点:
(1)当样本数目 m 很大时,每迭代一步都需要对所有样本计算,训练过程会很慢。
SGD
# PyTorch
# 设置batch_size大小为1
torch.optim.SGD(params, lr=<required parameter>, momentum=0, weight_decay=0)
优点:
(1)由于不是在全部训练数据上的损失函数,而是在每轮迭代中,随机优化某一条训练数据上的损失函数,这样每一轮参数的更新速度大大加快。
缺点:
(1)准确度下降。由于即使在目标函数为强凸函数的情况下,SGD仍旧无法做到线性收敛。
(2)可能会收敛到局部最优,由于单个样本并不能代表全体样本的趋势。
(3)不易于并行实现。
MBGD
# PyTorch
# 1 < 设置batch_size大小 < 测试集大小
torch.optim.SGD(params, lr=<required parameter>, momentum=0, weight_decay=0)
BGD和SGD的折中方案
优点:
(1)通过矩阵运算,每次在一个batch上优化神经网络参数并不会比单个数据慢太多。
(2)每次使用一个batch可以大大减小收敛所需要的迭代次数,同时可以使收敛到的结果更加接近梯度下降的效果。(比如样本30W,设置batch_size=100时,需要迭代3000次,远小于SGD的30W次)
(3)可实现并行化。
缺点:
(1)batch_size的不当选择可能会带来一些问题。

Adam
# PyTorch
torch.optim.Adam(params, lr=0.001, weight_decay=0)
- Adam算法将许多优化算法的功能结合到了相当强大的更新规则中。
- Adam算法在RMSProp算法基础上创建的,还在小批量的随机梯度上使用EWMA。
- 在估计动量和二次矩时,Adam算法使用偏差校正来调整缓慢的启动速度。
- 对于具有显著差异的梯度,我们可能会遇到收敛性问题。我们可以通过使用更大的小批量或者切换到改进的估计值st来修正它们。Yogi提供了这样的替代方案。
ReduceLROnPlateau
CLASS torch.optim.lr_scheduler.ReduceLROnPlateau(optimizer, mode='min', factor=0.1, patience=10, threshold=0.0001, threshold_mode='rel', cooldown=0, min_lr=0, eps=1e-08, verbose=False)
optimizer(optimizer): 优化器
mode(str): min/max 默认min 优化器的优化方向(向损失小优化/向损失大优化)
factor(float): 每次调整lr的倍率,默认0.1
patience(int): 最大等待轮数,若第patience + 1轮仍没有优化则lr=lr*factor
min_lr(float): 最小学习率,默认0
verbose(bool): 每次lr调整进行打印,默认False,例如'Epoch 00003: reducing learning rate of group 0 to 1.0000e+00.'(打印信息中的epoch从0开始计数)
使用
for i in range(epoch):
avg_loss = []
for data, label in train_dataloader:
out = net(data)
loss = loss_fun(out, label)
optimizer.zero_grad()
loss.backward()
optimizer.step()
avg_loss.append(loss.item())
# 将每个完整epoch的avg_loss作为metrics, 即avg_loss在第patience + 1轮仍没有优化则lr=lr*factor
avg_loss = sum(avg_loss) / len(avg_loss)
scheduler.step(avg_loss)
# 实例
from torch.nn import functional as F
from torch.optim.lr_scheduler import ReduceLROnPlateau
from torch import nn
import torch
epoch = 10
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.param = nn.Parameter(torch.tensor(1.))
def forward(self):
return torch.tensor(1.) * self.param
net = Net()
optimizer = torch.optim.Adam(net.parameters(), lr=1)
scheduler = ReduceLROnPlateau(optimizer, patience=1, verbose=True)
for i in range(epoch):
avg_loss = []
for j in range(5):
out = net()
loss = F.mse_loss(out, torch.tensor(1.))
optimizer.zero_grad()
loss.backward()
optimizer.step()
avg_loss.append(loss.item())
avg_loss = sum(avg_loss) / len(avg_loss)
scheduler.step(avg_loss)
# Epoch 00003: reducing learning rate of group 0 to 1.0000e-01.
# Epoch 00005: reducing learning rate of group 0 to 1.0000e-02.
# Epoch 00007: reducing learning rate of group 0 to 1.0000e-03.
# Epoch 00009: reducing learning rate of group 0 to 1.0000e-04.















 3343
3343











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











