







转载 Android Camera原理之camera provider启动
1. camera provider进程介绍:
# ps -e | grep camera
root 390 1 11732 2628 __skb_wait_for_more_packets 0 S camera_supervisor
cameraserver 597 1 26504 11988 binder_ioctl_write_read 0 S android.hardware.camera.provider@2.4-service
cameraserver 829 1 31712 15024 binder_ioctl_write_read 0 S cameraserver
cameraserver 597 1 26504 11988 binder_ioctl_write_read 0 S android.hardware.camera.provider@2.4-service
其中的pid是597,说明camera provider进程启动的时机比较早,而且权限组是 cameraserver
手机上运行的android.hardware.camera.provider@2.4-service进程是支持camera运行的重要进程。

上面这张图比较清楚的表现了camera provider进程在camera架构中位置,作为承上启下的部分,和cameraserver进程和底层的驱动交互,camera provider进程非常重要,camera HAL层几乎全部运行在camera provider进程中完成。
android.hardware.camera.provider@2.4-service在手机启动的时候就会启动起来,下面整体分析一下android.hardware.camera.provider@2.4-service进程的启动过程。
2. camera provider进程启动流程:
首先看下camera provider所在源码中的位置:hardware/interfaces/camera/provider/
/hardware/interfaces/camera/provider$ tree
.
├── 2.4
│ ├── Android.bp
│ ├── default
│ │ ├── Android.bp
│ │ ├── android.hardware.camera.provider@2.4-external-service.rc
│ │ ├── android.hardware.camera.provider@2.4-service_64.rc
│ │ ├── android.hardware.camera.provider@2.4-service.rc
│ │ ├── CameraProvider.cpp
│ │ ├── CameraProvider.h
│ │ ├── ExternalCameraProvider.cpp
│ │ ├── ExternalCameraProvider.h
│ │ ├── external-service.cpp
│ │ ├── OWNERS
│ │ └── service.cpp
│ ├── ICameraProviderCallback.hal
│ ├── ICameraProvider.hal
│ └── vts
│ ├── functional
│ │ ├── Android.bp
│ │ └── VtsHalCameraProviderV2_4TargetTest.cpp
│ └── OWNERS
└── README.md
4 directories, 18 files
可以看出来在hardware/interfaces/camera/provider/2.4/default/ 下面有几个rc文件,Android初始化就是执行这些rc文件,这里执行的是android.hardware.camera.provider@2.4-service.rc文件,看看其中的执行代码。
service vendor.camera-provider-2-4 /vendor/bin/hw/android.hardware.camera.provider@2.4-service
class hal
user cameraserver
group audio camera input drmrpc
ioprio rt 4
capabilities SYS_NICE
writepid /dev/cpuset/camera-daemon/tasks /dev/stune/top-app/tasks
第一行就看到了启动一个 /vendor/bin/hw/android.hardware.camera.provider@2.4-service 进程。
下面列出camera provider进程的启动流程,大家可以先看一下。
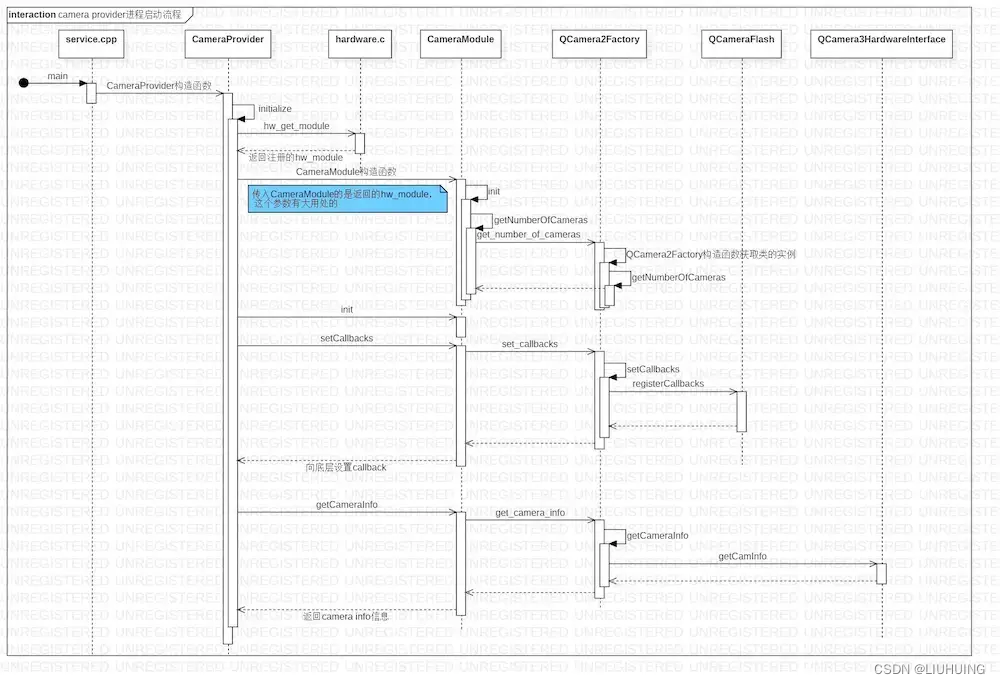
service.cpp : hardware/interfaces/camera/provider/2.4/default/service.cpp
CameraProvider : hardware/interfaces/camera/provider/2.4/default/CameraProvider.cpp
hardware.c : hardware/libhardware/hardware.c
CameraModule : hardware/interfaces/camera/common/1.0/default/CameraModule.cpp
QCamera2Factory : hardware/qcom/camera/QCamera2Factory.cpp
QCameraFlash : hardware/qcom/camera/QCamera2/util/QCameraFlash.cpp
QCamera3HardwareInterface : hardware/qcom/camera/QCamera2/HAL3/QCamera3HWI.cpp
这儿值得讲一讲的就是native中的函数指针的问题,从camera interfaces中将函数指针映射到camera hal层中。
主要从CameraModule中调用到QCamera2Factory中。期间使用了camera_module_t这个结构体。可以看下 CameraModule::init函数。
int CameraModule::init() {
ATRACE_CALL();
int res = OK;
if (getModuleApiVersion() >= CAMERA_MODULE_API_VERSION_2_4 &&
mModule->init != NULL) {
ATRACE_BEGIN("camera_module->init");
res = mModule->init();
ATRACE_END();
}
mCameraInfoMap.setCapacity(getNumberOfCameras());
return res;
}
这儿调用的mModule->init(); 这个mModule就是camera_module_t结构体对象
/hardware/libhardware/include/hardware/camera_common.h
typedef struct camera_module {
hw_module_t common;
int (*get_number_of_cameras)(void);
int (*get_camera_info)(int camera_id, struct camera_info *info);
int (*set_callbacks)(const camera_module_callbacks_t *callbacks);
void (*get_vendor_tag_ops)(vendor_tag_ops_t* ops);
int (*open_legacy)(const struct hw_module_t* module, const char* id,
uint32_t halVersion, struct hw_device_t** device);
int (*set_torch_mode)(const char* camera_id, bool enabled);
int (*init)();
void* reserved[5];
} camera_module_t;
结构体中有一些函数指针,我们现在需要搞清楚这些函数指针被映射到什么地方了?
hardware中interface中提供了原生的映射方法,在hardware/libhardware/modules/camera/3_0/CameraHAL.cpp中。
camera_module_t HAL_MODULE_INFO_SYM __attribute__ ((visibility("default"))) = {
.common = {
.tag = HARDWARE_MODULE_TAG,
.module_api_version = CAMERA_MODULE_API_VERSION_2_2,
.hal_api_version = HARDWARE_HAL_API_VERSION,
.id = CAMERA_HARDWARE_MODULE_ID,
.name = "Default Camera HAL",
.author = "The Android Open Source Project",
.methods = &gCameraModuleMethods,
.dso = NULL,
.reserved = {0},
},
.get_number_of_cameras = get_number_of_cameras,
.get_camera_info = get_camera_info,
.set_callbacks = set_callbacks,
.get_vendor_tag_ops = get_vendor_tag_ops,
.open_legacy = NULL,
.set_torch_mode = NULL,
.init = NULL,
.reserved = {0},
};
这是通用的映射,我们会重写这个HAL层接口,
例如v4l2_camera_hal.cpp 底下实现的
/*
* The framework calls the following wrappers, which in turn
* call the corresponding methods of the global HAL object.
*/
static int get_number_of_cameras() {
return gCameraHAL.getNumberOfCameras();
}
static int get_camera_info(int id, struct camera_info* info) {
return gCameraHAL.getCameraInfo(id, info);
}
static int set_callbacks(const camera_module_callbacks_t* callbacks) {
return gCameraHAL.setCallbacks(callbacks);
}
static void get_vendor_tag_ops(vendor_tag_ops_t* ops) {
return gCameraHAL.getVendorTagOps(ops);
}
static int open_legacy(const hw_module_t* module,
const char* id,
uint32_t halVersion,
hw_device_t** device) {
return gCameraHAL.openLegacy(module, id, halVersion, device);
}
static int set_torch_mode(const char* camera_id, bool enabled) {
return gCameraHAL.setTorchMode(camera_id, enabled);
}
static int open_dev(const hw_module_t* module,
const char* name,
hw_device_t** device) {
return gCameraHAL.openDevice(module, name, device);
}
} // namespace v4l2_camera_hal
static hw_module_methods_t v4l2_module_methods = {
.open = v4l2_camera_hal::open_dev};
camera_module_t HAL_MODULE_INFO_SYM __attribute__((visibility("default"))) = {
.common =
{
.tag = HARDWARE_MODULE_TAG,
.module_api_version = CAMERA_MODULE_API_VERSION_2_4,
.hal_api_version = HARDWARE_HAL_API_VERSION,
.id = CAMERA_HARDWARE_MODULE_ID,
.name = "V4L2 Camera HAL v3",
.author = "The Android Open Source Project",
.methods = &v4l2_module_methods,
.dso = nullptr,
.reserved = {0},
},
.get_number_of_cameras = v4l2_camera_hal::get_number_of_cameras,
.get_camera_info = v4l2_camera_hal::get_camera_info,
.set_callbacks = v4l2_camera_hal::set_callbacks,
.get_vendor_tag_ops = v4l2_camera_hal::get_vendor_tag_ops,
.open_legacy = v4l2_camera_hal::open_legacy,
.set_torch_mode = v4l2_camera_hal::set_torch_mode,
.init = nullptr,
.reserved = {nullptr, nullptr, nullptr, nullptr, nullptr}};















 687
687











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









