







 近年来,研究人员致力于解决深度估计网络在现实环境中的适应性问题,尤其是通过无监督学习来减少对大量真实数据的依赖。文章列举了如《Unsupervised Monocular Depth Estimation with Left-Right Consistency》等论文,这些工作展示了如何利用无监督学习方法在没有标注数据的情况下训练深度估计网络,从而提高其在不同环境中的泛化能力。
近年来,研究人员致力于解决深度估计网络在现实环境中的适应性问题,尤其是通过无监督学习来减少对大量真实数据的依赖。文章列举了如《Unsupervised Monocular Depth Estimation with Left-Right Consistency》等论文,这些工作展示了如何利用无监督学习方法在没有标注数据的情况下训练深度估计网络,从而提高其在不同环境中的泛化能力。
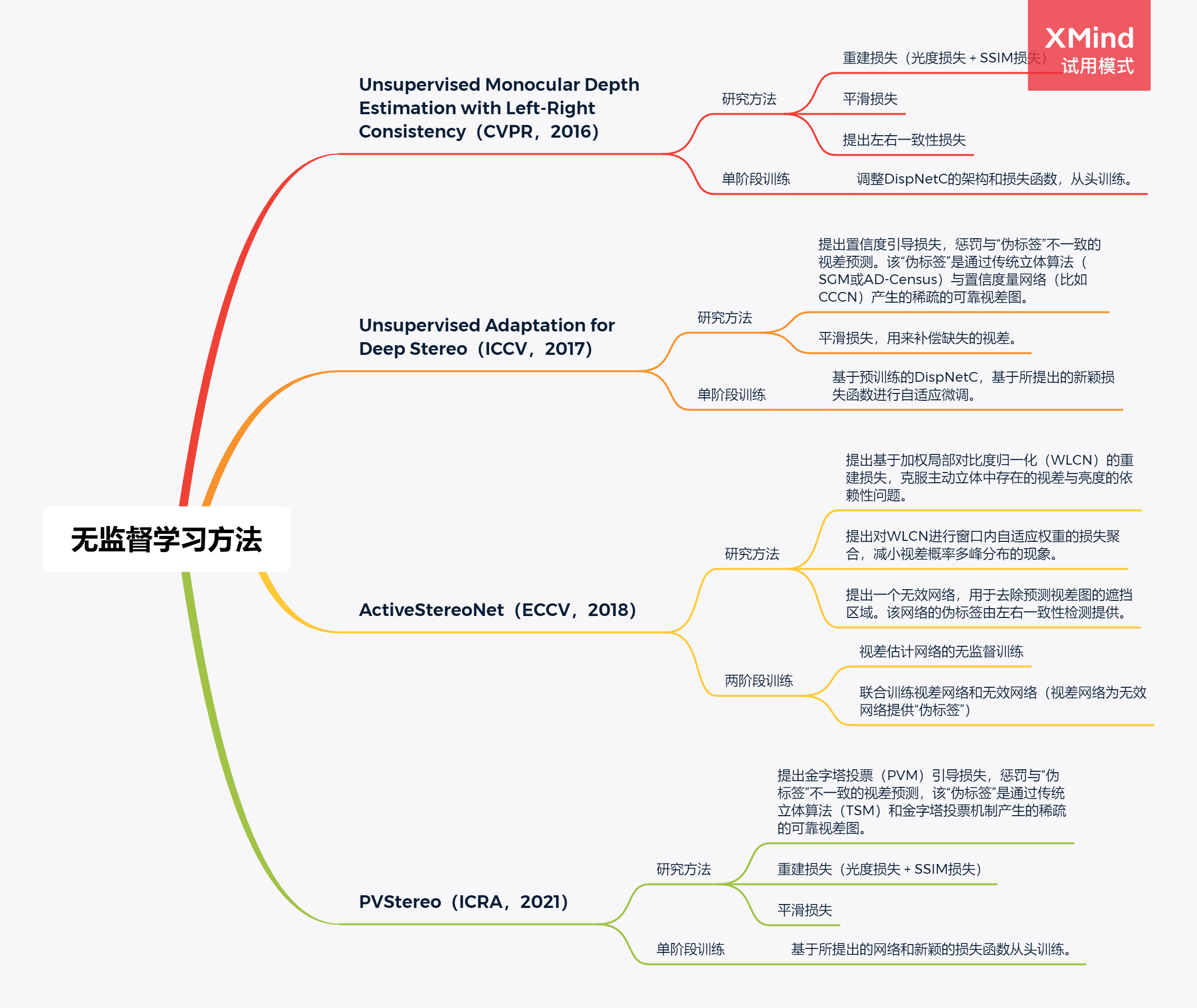
现在的端到端单目/双目深度估计网络一般在大型合成数据集(比如SceneFlow,Cityscapes)上进行预训练,然后通过少量的真实数据集(比如KITTI,Middlebury)微调使其适应不同的环境。然而现有网络依然难以适应于未见过的真实环境,而且获取足够的真实视差图和对应的立体图像对难度巨大,因此研究人员研究基于无监督学习的深度估计网络。
下面列举出近年来的几篇关于无监督学习的深度估计网络的论文。
论文链接:
现在的端到端单目/双目深度估计网络一般在大型合成数据集(比如SceneFlow,Cityscapes)上进行预训练,然后通过少量的真实数据集(比如KITTI,Middlebury)微调使其适应不同的环境。然而现有网络依然难以适应于未见过的真实环境,而且获取足够的真实视差图和对应的立体图像对难度巨大,因此研究人员研究基于无监督学习的深度估计网络。
下面列举出近年来的几篇关于无监督学习的深度估计网络的论文。
论文链接:

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























