






点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
微信公众号:OpenCV学堂
关注获取更多计算机视觉与深度学习知识
OpenCV中的模板匹配
OpenCV中的模板匹配是支持基于NCC相似度查找的,但是不是很好用,一个主要的原因是查找最大阈值,只能匹配一个,自己比对阈值,又导致无法正确设定阈值范围,所以问题很多。于是我重新写了纯Python版本的NCC图像模板匹配的代码实现了一个Python版本的,简单易用,支持多尺度,跟多进程并行!
主要思想
主要是基于NCC实现的像素相似度计算,这个OpenCV官方的模板匹配也有这中方式像素相似度计算支持,它的公式描述如下:
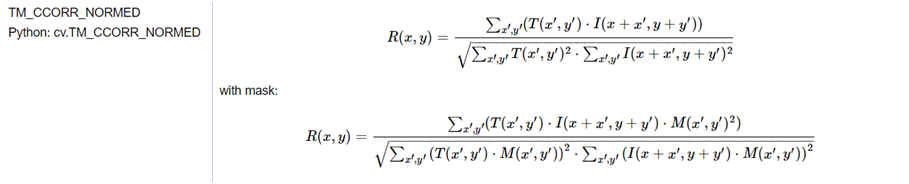
就是参照这个公式,然后基于OpenCV提供的积分图计算函数,实现了NCC相似度比较计算,值在0~1之间,1表示完全相似,0表示完全不相似。
代码实现
我把整个部分搞成了一个类,调用的方法主要是run_match,就可以直接运行,完成模板匹配。大体的功能跟OpenCV实现的模板匹配功能比较相似,改进的地方就是比较方便的实现多个对象匹配的直接输出Box框。该类完整的代码实现如下:
import cv2 as cv
import numpy as np
import time
import concurrent.futures
class NCCTemplateMatch:
def __init__(self, ref_imgs, target_imgs, scores, tpl_sums, tpl_sqr_sums, target_sums, target_sqr_sums):
self.ref_imgs = ref_imgs
self.target_imgs = target_imgs
self.scores = scores
self.tpls_sums = tpl_sums
self.tpls_sqsums = tpl_sqr_sums
self.target_sums = target_sums
self.target_sqsums = target_sqr_sums
self.nms_boxes = []
def run_match(self):
num_ps = min(6, len(self.ref_imgs))
# print("num_ps: ", num_ps)
start = time.perf_counter()
with concurrent.futures.ProcessPoolExecutor(num_ps) as executor:
matched = executor.map(self.ncc_run, self.ref_imgs, self.target_imgs, self.tpls_sums, self.tpls_sqsums, self.target_sums, self.target_sqsums, self.scores)
self.nms_boxes = list(matched)
end = time.perf_counter()
print(f'Finished in {round(end-start, 2)} seconds')
def ncc_run(self, tpl_gray, target_gray, tpl_sum, tpl_sqsum, target_sum, target_sqsum, score):
print("run once~~~~")
th, tw = tpl_gray.shape
min_step = max(1, min(th // 16, tw // 16))
h, w = target_gray.shape
sr = 1 / (th * tw)
t_s1 = tpl_sum[th, tw]
t_s1_2 = t_s1 * t_s1 * sr
t_s1_1 = t_s1 * sr
t_s2 = tpl_sqsum[th, tw]
sum_t = np.sqrt(t_s2 - t_s1_2)
row = 0
boxes = []
confidences = []
while row < (h - th+1):
col = 0
while col < (w - tw+1):
s1 = self.get_block_sum(target_sum, col, row, col + tw, row + th)
s2 = self.get_block_sum(target_sqsum, col, row, col + tw, row + th)
sum1 = t_s1_1 * s1
ss_sqr = s2 - s1 * s1 * sr
if ss_sqr < 0: # fix issue, 精度问题
ss_sqr = 0.0
sum2 = sum_t * np.sqrt(ss_sqr)
sum3 = np.sum(np.multiply(tpl_gray, target_gray[row:row + th, col:col + tw]))
if sum2 == 0.0:
ncc = 0.0
else:
ncc = (sum3 - sum1) / sum2
if ncc > score:
boxes.append([col, row, tw, th])
confidences.append(float(ncc))
col += tw//2
else:
col += min_step
row += min_step
# NMS Process
nms_indices = cv.dnn.NMSBoxes(boxes, confidences, 0.5, 0.5)
det_boxes = []
print(nms_indices)
for i in range(len(nms_indices)):
rect_box = boxes[nms_indices[i]]
det_boxes.append(rect_box)
return det_boxes
def get_block_sum(self, integal_img, x1, y1, x2, y2):
t1 = integal_img[y1, x1]
t2 = integal_img[y1, x2]
t3 = integal_img[y2, x1]
t4 = integal_img[y2, x2]
s = t4 - t2 - t3 + t1
return s相关的测试与调用代码如下:
print("test ncc......")
tpl_image = cv.imread("D:/images/llk_tpl.png")
target_image = cv.imread("D:/images/llk.jpg")
tpl_gray = cv.cvtColor(tpl_image, cv.COLOR_BGR2GRAY)
target_gray = cv.cvtColor(target_image, cv.COLOR_BGR2GRAY)
tpl_gray = np.float32(tpl_gray / 255.0)
target_gray = np.float32(target_gray / 255.0)
tpl_sum, tpl_sqsum = cv.integral2(tpl_gray)
t_sum, t_sqsum = cv.integral2(target_gray)
matcher = NCCTemplateMatch([tpl_gray], [target_gray], [0.85],
[tpl_sum], [tpl_sqsum], [t_sum], [t_sqsum])
matcher.run_match()
for rect_box in matcher.nms_boxes[0]:
cv.rectangle(target_image, (rect_box[0], rect_box[1]),
(rect_box[0]+rect_box[2], rect_box[1]+rect_box[3]), (0, 0, 255), 2, 8, 0)
cv.imshow("result", target_image)
cv.waitKey(0)
cv.destroyAllWindows()模板图像:

运行结果如下:

好消息!
小白学视觉知识星球
开始面向外开放啦👇👇👇

下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









