



灵长类动物的视觉系统接受了大量的感官输入, 这些感官输入远远超过了大脑能够完全处理的程度。 然而,并非所有刺激的影响都是相等的。 意识的聚集和专注使灵长类动物能够在复杂的视觉环境中将注意力引向感兴趣的物体,例如猎物和天敌。 只关注一小部分信息的能力对进化更加有意义,使人类得以生存和成功。
自19世纪以来,科学家们一直致力于研究认知神经科学领域的注意力。 本章的很多章节将涉及到一些研究。
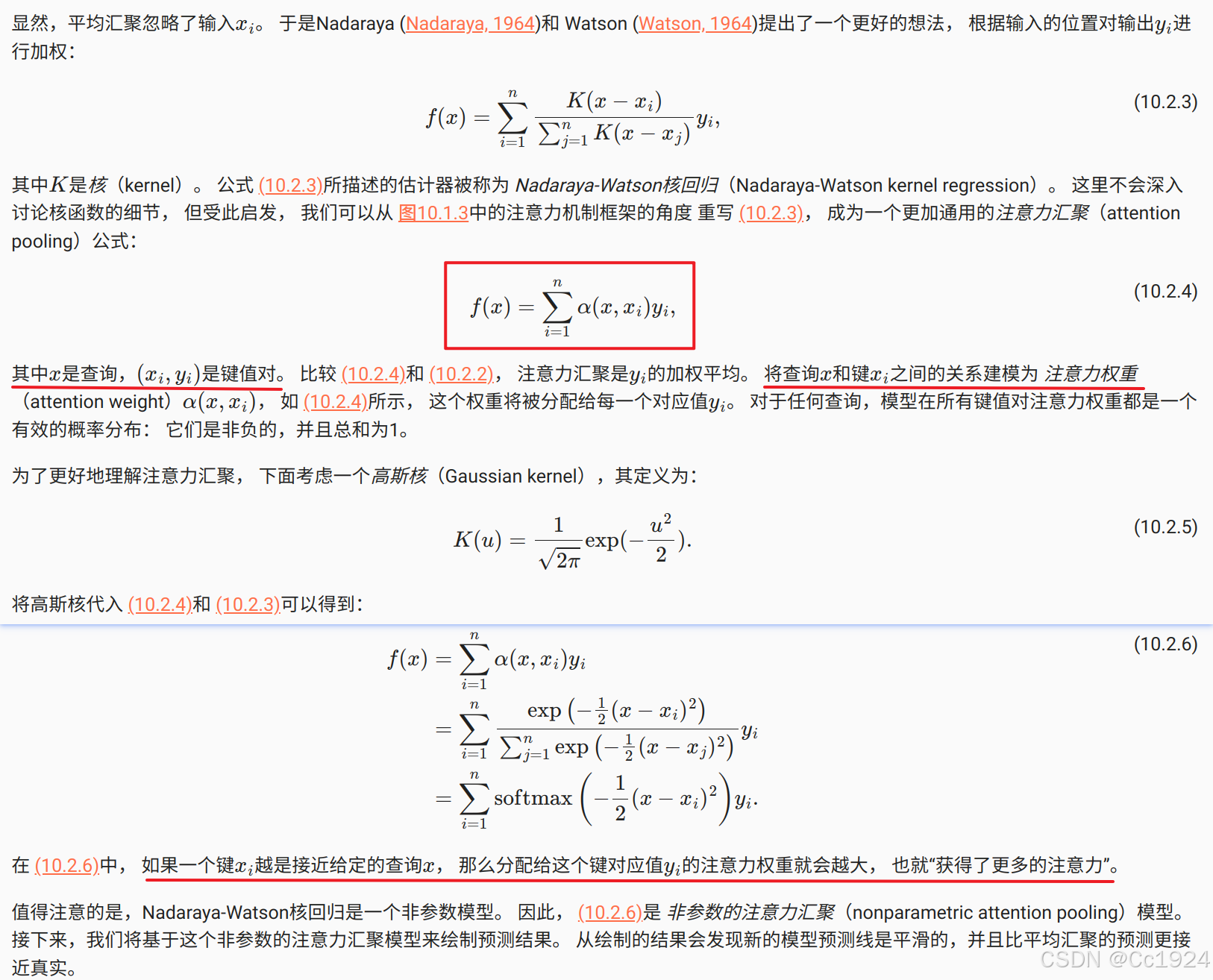
首先回顾一个经典注意力框架,解释如何在视觉场景中展开注意力。 受此框架中的注意力提示(attention cues)的启发, 我们将设计能够利用这些注意力提示的模型。 1964年的Nadaraya-Waston核回归(kernel regression)正是具有 注意力机制(attention mechanism)的机器学习的简单演示。
然后继续介绍的是注意力函数,它们在深度学习的注意力模型设计中被广泛使用。 具体来说,我们将展示如何使用这些函数来设计Bahdanau注意力。 Bahdanau注意力是深度学习中的具有突破性价值的注意力模型,它双向对齐并且可以微分。
最后将描述仅仅基于注意力机制的Transformer架构, 该架构中使用了多头注意力(multi-head attention) 和自注意力(self-attention)。 自2017年横空出世,Transformer一直都普遍存在于现代的深度学习应用中, 例如语言、视觉、语音和强化学习领域。
10.1. 注意力提示
10.1.1. 生物学中的注意力提示
注意力是如何应用于视觉世界中的呢? 这要从当今十分普及的双组件(two-component)的框架开始讲起: 这个框架的出现可以追溯到19世纪90年代的威廉·詹姆斯, 他被认为是“美国心理学之父” (James, 2007)。 在这个框架中,受试者基于非自主性提示和自主性提示 有选择地引导注意力的焦点。
- 非自主性提示是基于环境中物体的突出性和易见性。 想象一下,假如我们面前有五个物品: 一份报纸、一篇研究论文、一杯咖啡、一本笔记本和一本书, 就像 图10.1.1。 所有纸制品都是黑白印刷的,但咖啡杯是红色的。 换句话说,这个咖啡杯在这种视觉环境中是突出和显眼的, 不由自主地引起人们的注意。 所以我们会把视力最敏锐的地方放到咖啡上, 如 图10.1.1所示。
- 喝咖啡后,我们会变得兴奋并想读书, 所以转过头,重新聚焦眼睛,然后看看书, 就像 图10.1.2中描述那样。 与 图10.1.1中由于突出性导致的选择不同, 此时选择书是受到了认知和意识的控制, 因此注意力在基于自主性提示去辅助选择时将更为谨慎。 受试者的主观意愿推动,选择的力量也就更强大。
10.1.2. 查询、键和值
自主性的与非自主性的注意力提示解释了人类的注意力的方式, 下面来看看如何通过这两种注意力提示, 用神经网络来设计注意力机制的框架,
首先,考虑一个相对简单的状况, 即只使用非自主性提示。 要想将选择偏向于感官输入, 则可以简单地使用参数化的全连接层, 甚至是非参数化的最大汇聚层或平均汇聚层。
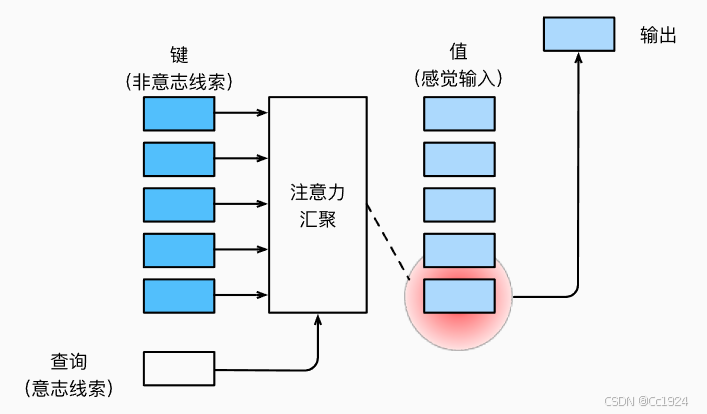
因此,“是否包含自主性提示”将注意力机制与全连接层或汇聚层区别开来。 在注意力机制的背景下,自主性提示被称为查询(query)。 给定任何查询,注意力机制通过注意力汇聚(attention pooling) 将选择引导至感官输入(sensory inputs,例如中间特征表示)。 在注意力机制中,这些感官输入被称为值(value)。 更通俗的解释,每个值都与一个键(key)配对, 这可以想象为感官输入的非自主提示。 如 图10.1.3所示,可以通过设计注意力汇聚的方式, 便于给定的查询(自主性提示)与键(非自主性提示)进行匹配, 这将引导得出最匹配的值(感官输入)。
10.1.3. 注意力的可视化
平均汇聚层可以被视为输入的加权平均值, 其中各输入的权重是一样的。 实际上,注意力汇聚得到的是加权平均的总和值, 其中权重是在给定的查询和不同的键之间计算得出的。
为了可视化注意力权重,需要定义一个show_heatmaps函数。 其输入matrices的形状是 (要显示的行数,要显示的列数,查询的数目,键的数目)。
注意: 要显示的行数/列数 是指 matplotlib 的 subplot 中图像的行列数。
#@save
def show_heatmaps(matrices, xlabel, ylabel, titles=None, figsize=(2.5, 2.5),
cmap='Reds'):
"""显示矩阵热图"""
d2l.use_svg_display()
num_rows, num_cols = matrices.shape[0], matrices.shape[1]
fig, axes = d2l.plt.subplots(num_rows, num_cols, figsize=figsize,
sharex=True, sharey=True, squeeze=False)
for i, (row_axes, row_matrices) in enumerate(zip(axes, matrices)):
for j, (ax, matrix) in enumerate(zip(row_axes, row_matrices)):
# 指定颜色映射(如 'Reds' 表示红色渐变,值越大颜色越深)。
# pcm保存 imshow 返回的 ScalarMappable 对象,后续用于创建颜色条。
pcm = ax.imshow(matrix.detach().numpy(), cmap=cmap)
if i == num_rows - 1:
ax.set_xlabel(xlabel)
if j == 0:
ax.set_ylabel(ylabel)
if titles:
ax.set_title(titles[j])
# 为热力图添加颜色条,显示数值与颜色的对应关系。
# 指定颜色条关联的子图组(axes 是所有子图的数组),颜色条会基于所有子图的数据范围统一刻度。这样是为了统一所有子图的颜色刻度,确保对比有意义。
# 控制颜色条的长度缩放(默认1.0),这里缩短为60%,避免图像被压缩。
fig.colorbar(pcm, ax=axes, shrink=0.6);
10.1.4. 小结
- 人类的注意力是有限的、有价值和稀缺的资源。
- 受试者使用非自主性和自主性提示有选择性地引导注意力。前者基于突出性,后者则依赖于意识。
- 注意力机制与全连接层或者汇聚层的区别源于增加的自主提示。
- 由于包含了自主性提示,注意力机制与全连接的层或汇聚层不同。
- 注意力机制通过注意力汇聚使选择偏向于值(感官输入),其中包含查询(自主性提示)和键(非自主性提示)。键和值是成对的。
- 可视化查询和键之间的注意力权重是可行的。
10.2. 注意力汇聚:Nadaraya-Watson 核回归
上节介绍了框架下的注意力机制的主要成分 图10.1.3: 查询(自主提示)和键(非自主提示)之间的交互形成了注意力汇聚; 注意力汇聚有选择地聚合了值(感官输入)以生成最终的输出。 本节将介绍注意力汇聚的更多细节, 以便从宏观上了解注意力机制在实践中的运作方式。 具体来说,1964年提出的Nadaraya-Watson核回归模型 是一个简单但完整的例子,可以用于演示具有注意力机制的机器学习。
10.2.1. 生成数据集
n_train = 50 # 训练样本数
# 返回:排序后的张量,排序后的元素在原始张量中的索引
x_train, _ = torch.sort(torch.rand(n_train) * 5) # 排序后的训练样本
def f(x):
return 2 * torch.sin(x) + x**0.8
y_train = f(x_train) + torch.normal(0.0, 0.5, (n_train,)) # 训练样本的输出
x_test = torch.arange(0, 5, 0.1) # 测试样本
y_truth = f(x_test) # 测试样本的真实输出
n_test = len(x_test) # 测试样本数
n_test
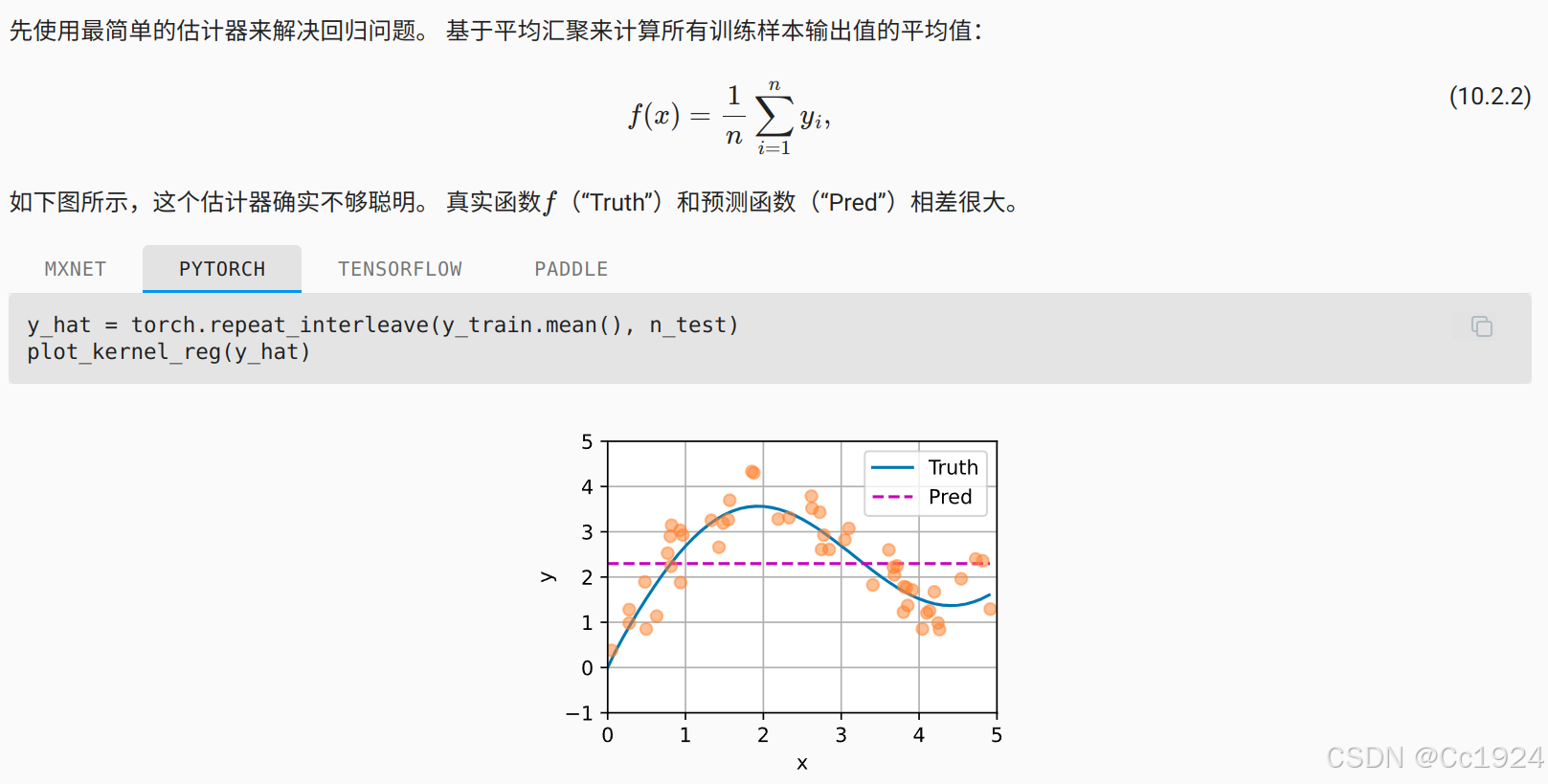
10.2.2. 平均汇聚
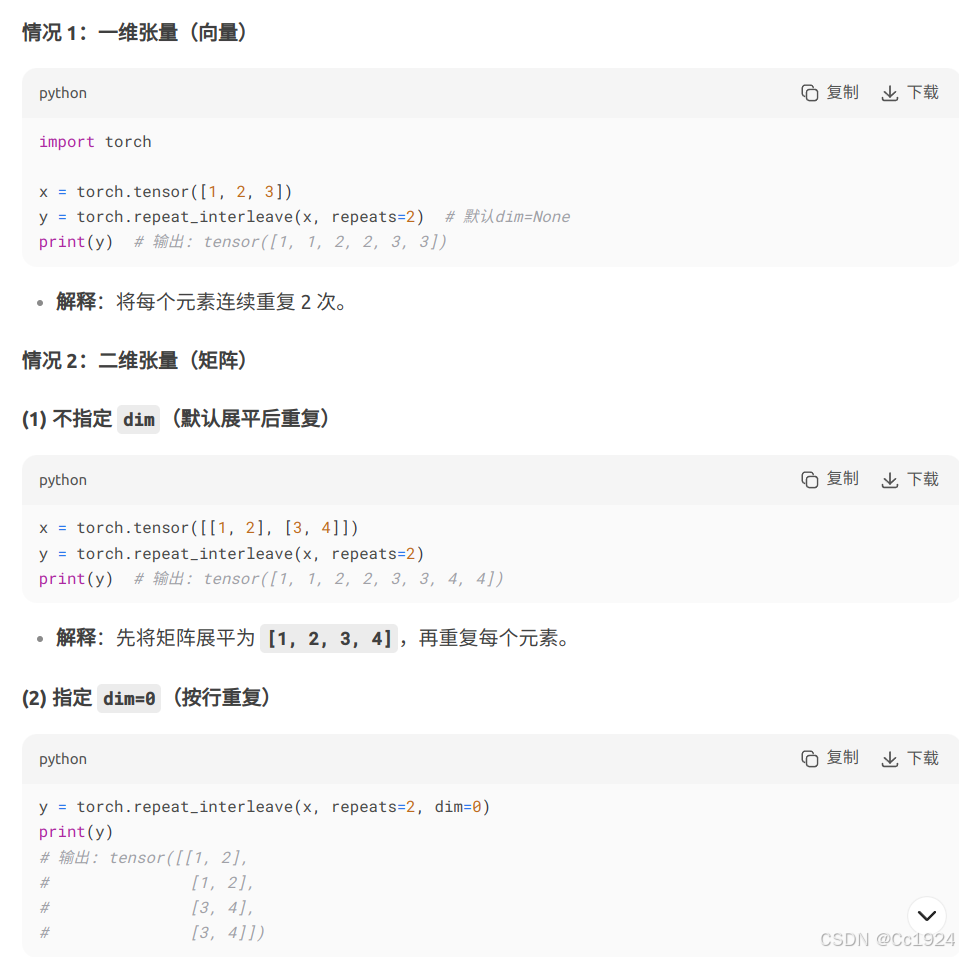
解释:torch.repeat_interleave(input, repeats, dim=None) 的功能是:
- 按指定维度 dim 重复张量 input 的元素。
- 如果 dim 为 None(默认),则先将 input 展平(flatten)为一维张量,再重复每个元素。
- input是标量:如果 input 是标量,则直接将其重复 repeats 次,生成一个一维张量。
示例:
torch.repeat_interleave(2.0, 3) # 输出:tensor([2., 2., 2.])
- input是张量:
- 与 torch.repeat() 的区别
- torch.repeat_interleave():按元素重复(可指定维度)。
- torch.repeat():按张量整体重复(如复制整个矩阵)。
x = torch.tensor([[1, 2]]) y = x.repeat(2, 3) # 行复制2次,列复制3次 print(y) # 输出: tensor([[1, 2, 1, 2, 1, 2], # [1, 2, 1, 2, 1, 2]])
10.2.3. 非参数注意力汇聚
# X_repeat的形状:(n_test,n_train),
# 每一行都包含着相同的测试输入(例如:同样的查询)
X_repeat = x_test.repeat_interleave(n_train).reshape((-1, n_train))
# x_train包含着键。attention_weights的形状:(n_test,n_train),
# 每一行都包含着要在给定的每个查询的值(y_train)之间分配的注意力权重
attention_weights = nn.functional.softmax(-(X_repeat - x_train)**2 / 2, dim=1)
# y_hat的每个元素都是值的加权平均值,其中的权重是注意力权重
y_hat = torch.matmul(attention_weights, y_train)
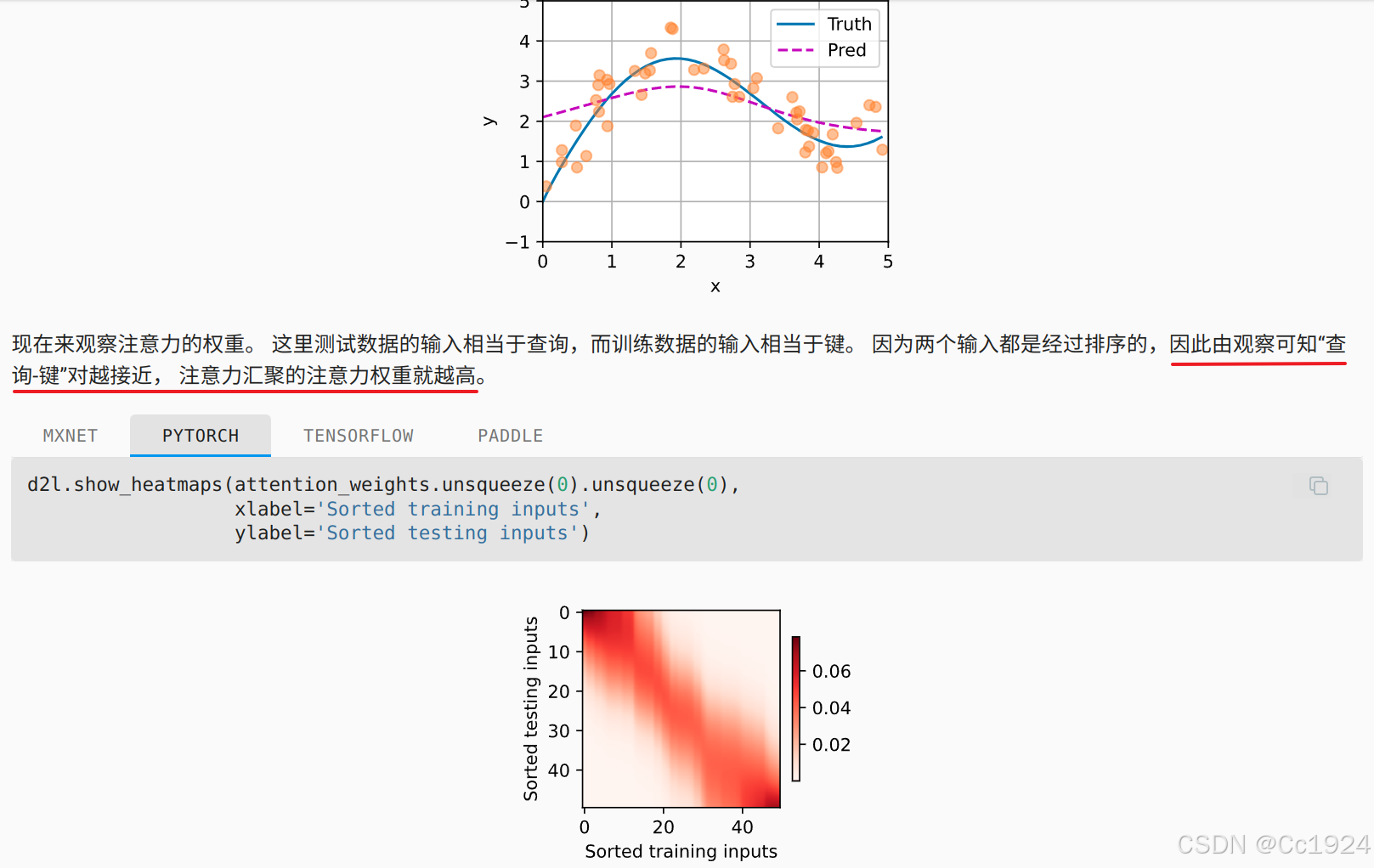
plot_kernel_reg(y_hat)
10.2.4. 带参数注意力汇聚
10.2.4.1. 批量矩阵乘法
为了更有效地计算小批量数据的注意力, 我们可以利用深度学习开发框架中提供的批量矩阵乘法。
X = torch.ones((2, 1, 4))
Y = torch.ones((2, 4, 6))
# (n, a, b) @ (n, b, c) = (n, a, c)
torch.bmm(X, Y).shape
在注意力机制的背景中,我们可以使用小批量矩阵乘法来计算小批量数据中的加权平均值。
weights = torch.ones((2, 10)) * 0.1
values = torch.arange(20.0).reshape((2, 10))
# (2, 1, 10) @ (2, 10, 1) = (2, 1, 1)
torch.bmm(weights.unsqueeze(1), values.unsqueeze(-1))
10.2.4.2. 定义模型
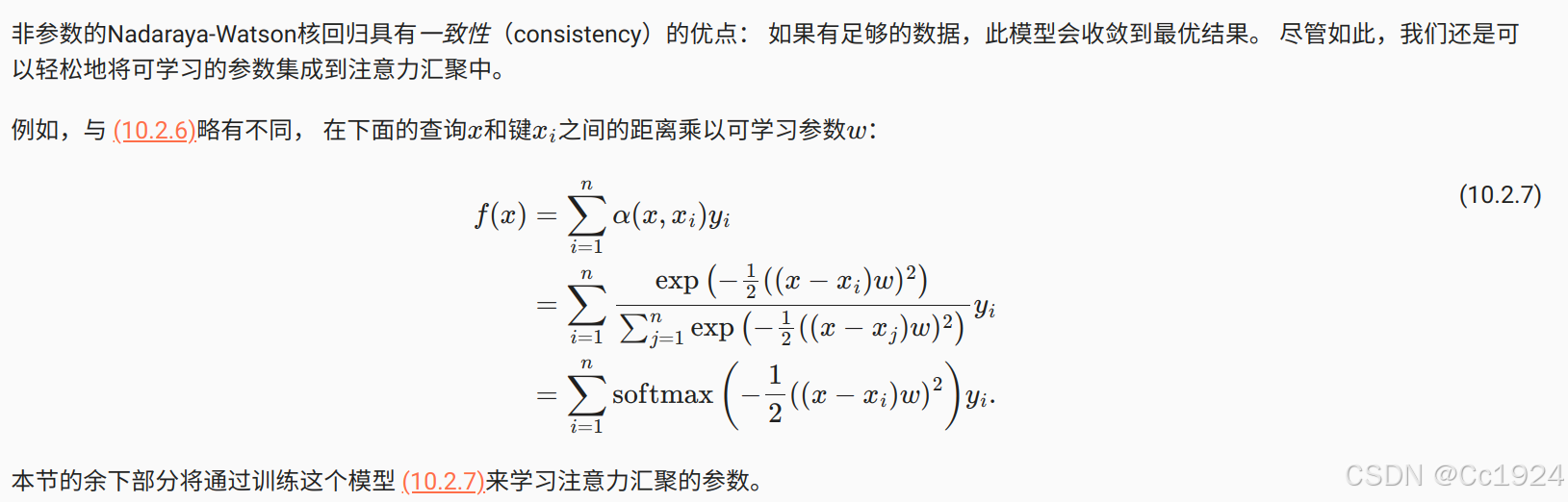
基于 (10.2.7)中的 带参数的注意力汇聚,使用小批量矩阵乘法, 定义Nadaraya-Watson核回归的带参数版本为:
class NWKernelRegression(nn.Module):
def __init__(self, **kwargs):
super().__init__(**kwargs)
self.w = nn.Parameter(torch.rand((1,), requires_grad=True))
def forward(self, queries, keys, values):
# queries和attention_weights的形状为(查询个数,“键-值”对个数)
# (q,) -> (k*q) -> (q, k)
queries = queries.repeat_interleave(keys.shape[1]).reshape((-1, keys.shape[1]))
# (q, k)
self.attention_weights = nn.functional.softmax(
-((queries - keys) * self.w)**2 / 2, dim=1)
# values的形状为(查询个数,“键-值”对个数)
return torch.bmm(self.attention_weights.unsqueeze(1),
values.unsqueeze(-1)).reshape(-1)
10.2.4.3. 训练
接下来,将训练数据集变换为键和值用于训练注意力模型。 在带参数的注意力汇聚模型中, 任何一个训练样本的输入都会和除自己以外的所有训练样本的“键-值”对进行计算, 从而得到其对应的预测输出。
# X_tile的形状:(n_train,n_train),每一行都包含着相同的训练输入
X_tile = x_train.repeat((n_train, 1))
# Y_tile的形状:(n_train,n_train),每一行都包含着相同的训练输出
Y_tile = y_train.repeat((n_train, 1))
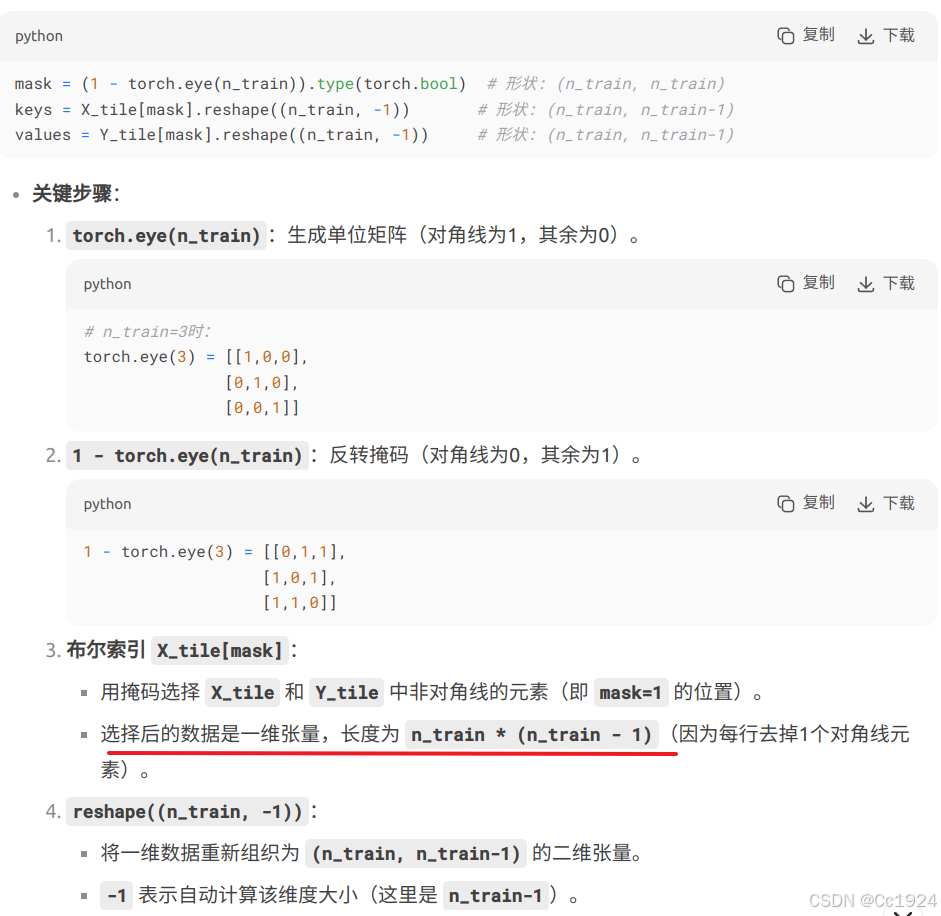
# keys的形状:('n_train','n_train'-1)
keys = X_tile[(1 - torch.eye(n_train)).type(torch.bool)].reshape((n_train, -1))
# values的形状:('n_train','n_train'-1)
values = Y_tile[(1 - torch.eye(n_train)).type(torch.bool)].reshape((n_train, -1))
解释:生成掩码并移除对角线
应用场景:注意力机制
- keys 和 values 用于计算查询(query)与所有训练样本(除自身外)的注意力权重。
- 例如,预测第 i 个样本时,避免使用它自身的值(防止数据泄漏)。
10.2.5. 小结
- Nadaraya-Watson核回归是具有注意力机制的机器学习范例。
- Nadaraya-Watson核回归的注意力汇聚是对训练数据中输出的加权平均。从注意力的角度来看,分配给每个值的注意力权重取决于将值所对应的键和查询作为输入的函数。
- 注意力汇聚可以分为非参数型和带参数型。
10.3. 注意力评分函数
10.2节使用了高斯核来对查询和键之间的关系建模。 (10.2.6)中的 高斯核指数部分可以视为注意力评分函数(attention scoring function), 简称评分函数(scoring function), 然后把这个函数的输出结果输入到softmax函数中进行运算。 通过上述步骤,将得到与键对应的值的概率分布(即注意力权重)。 最后,注意力汇聚的输出就是基于这些注意力权重的值的加权和。
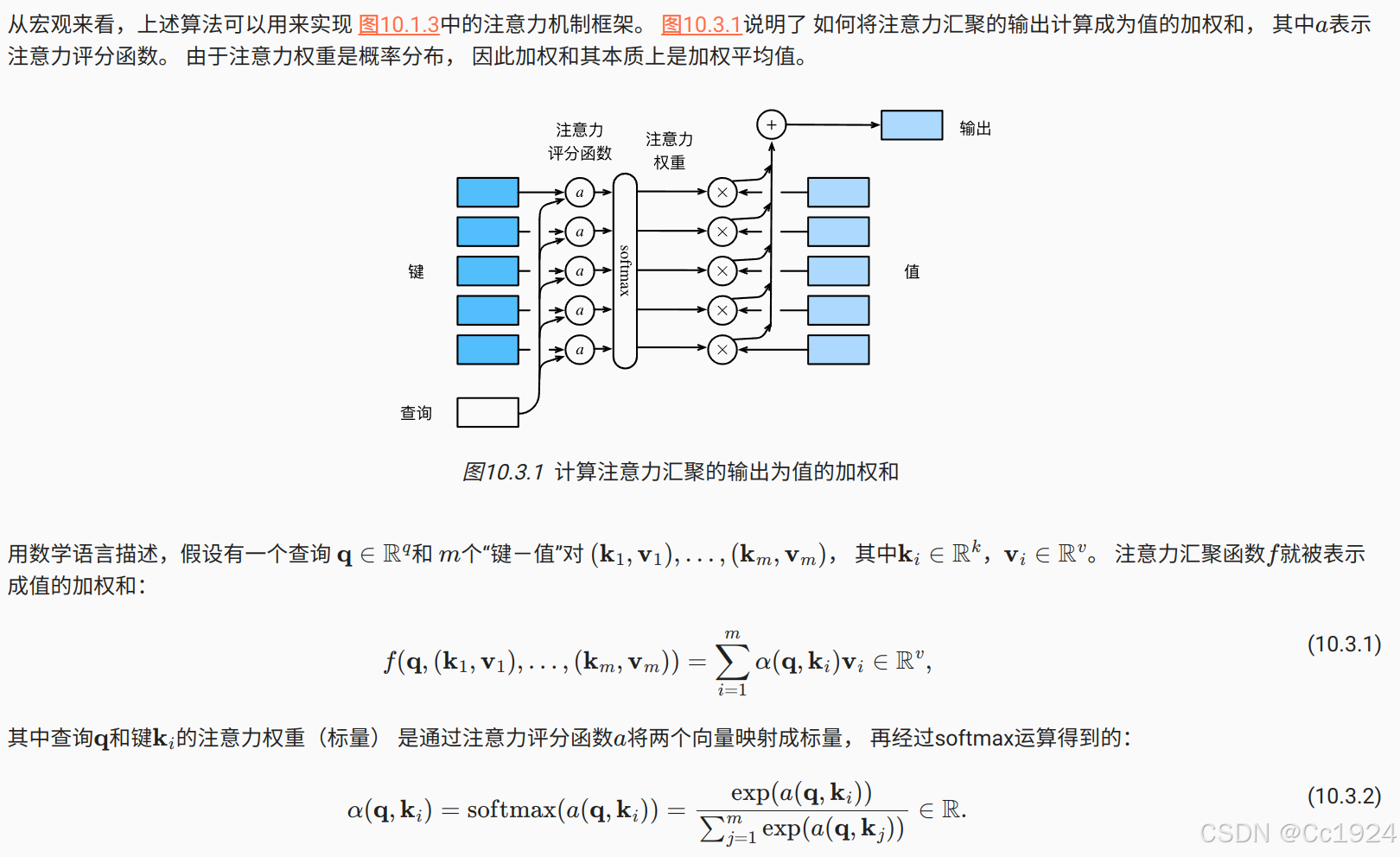
正如上图所示,选择不同的注意力评分函数 a 会导致不同的注意力汇聚操作。 本节将介绍两个流行的评分函数,稍后将用他们来实现更复杂的注意力机制。
10.3.1. 掩蔽softmax操作
正如上面提到的,softmax操作用于输出一个概率分布作为注意力权重。 在某些情况下,并非所有的值都应该被纳入到注意力汇聚中。 例如,为了在 9.5节中高效处理小批量数据集, 某些文本序列被填充了没有意义的特殊词元。 为了仅将有意义的词元作为值来获取注意力汇聚, 可以指定一个有效序列长度(即词元的个数), 以便在计算softmax时过滤掉超出指定范围的位置。 下面的masked_softmax函数 实现了这样的掩蔽softmax操作(masked softmax operation), 其中任何超出有效长度的位置都被掩蔽并置为0。
#@save
def masked_softmax(X, valid_lens):
"""通过在最后一个轴上掩蔽元素来执行softmax操作"""
# X:3D张量,valid_lens:1D或2D张量
if valid_lens is None:
return nn.functional.softmax(X, dim=-1)
else:
shape = X.shape
# dim=1,表示设置张量最后一个轴的有效长度都相同
if valid_lens.dim() == 1:
# 在倒数第二个轴上复制最后一个轴的有效长度
valid_lens = torch.repeat_interleave(valid_lens, shape[1])
else:
valid_lens = valid_lens.reshape(-1)
# 最后一轴上被掩蔽的元素使用一个非常大的负值替换,从而其softmax输出为0
X = d2l.sequence_mask(X.reshape(-1, shape[-1]), valid_lens,
value=-1e6)
return nn.functional.softmax(X.reshape(shape), dim=-1)

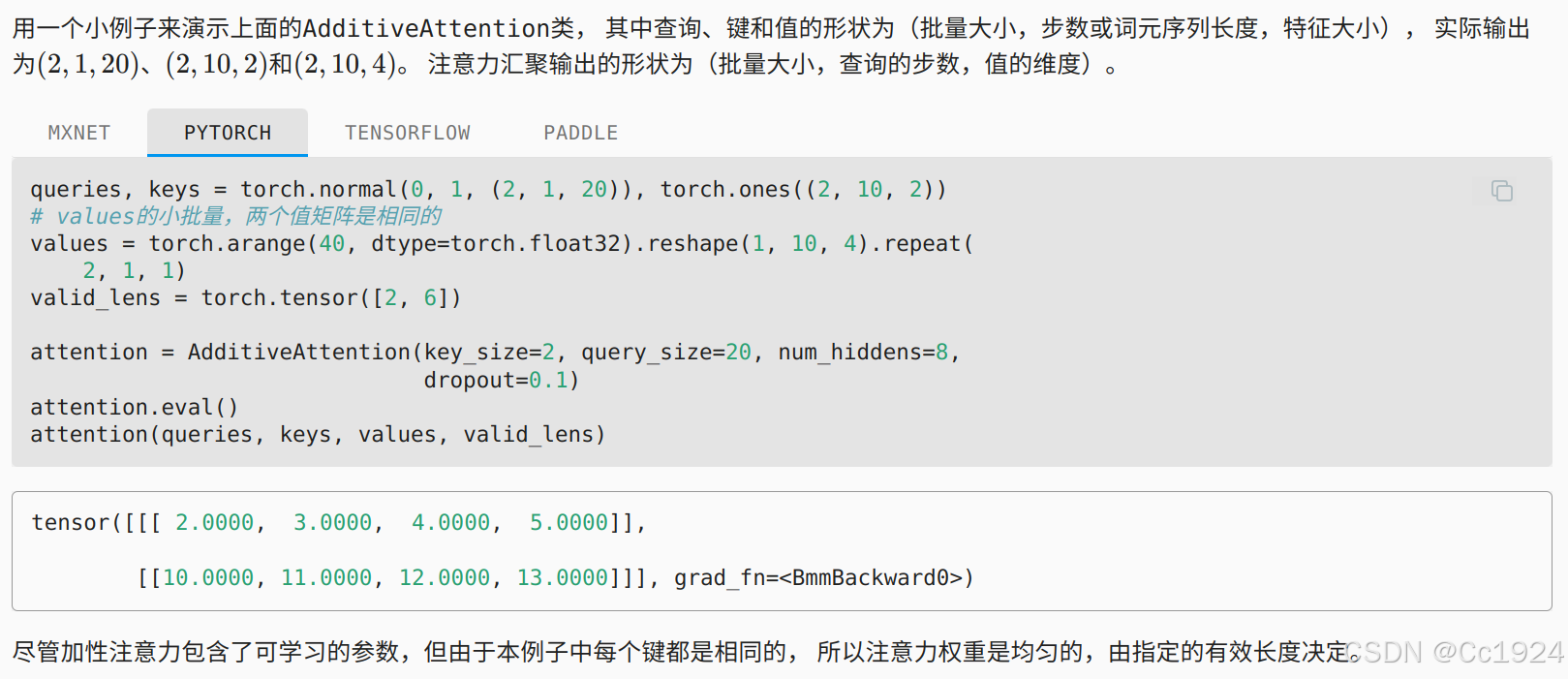
10.3.2. 加性注意力

#@save
class AdditiveAttention(nn.Module):
"""加性注意力"""
def __init__(self, key_size, query_size, num_hiddens, dropout, **kwargs):
super(AdditiveAttention, self).__init__(**kwargs)
self.W_k = nn.Linear(key_size, num_hiddens, bias=False)
self.W_q = nn.Linear(query_size, num_hiddens, bias=False)
self.w_v = nn.Linear(num_hiddens, 1, bias=False)
self.dropout = nn.Dropout(dropout)
def forward(self, queries, keys, values, valid_lens):
queries, keys = self.W_q(queries), self.W_k(keys)
# 在维度扩展后,
# queries的形状:(batch_size,查询的个数,1,num_hidden)
# key的形状:(batch_size,1,“键-值”对的个数,num_hiddens)
# 使用广播方式进行求和
features = queries.unsqueeze(2) + keys.unsqueeze(1)
features = torch.tanh(features)
# self.w_v仅有一个输出,因此从形状中移除最后那个维度。
# scores的形状:(batch_size,查询的个数,“键-值”对的个数)
scores = self.w_v(features).squeeze(-1)
self.attention_weights = masked_softmax(scores, valid_lens)
# values的形状:(batch_size,“键-值”对的个数,值的维度)
return torch.bmm(self.dropout(self.attention_weights), values)
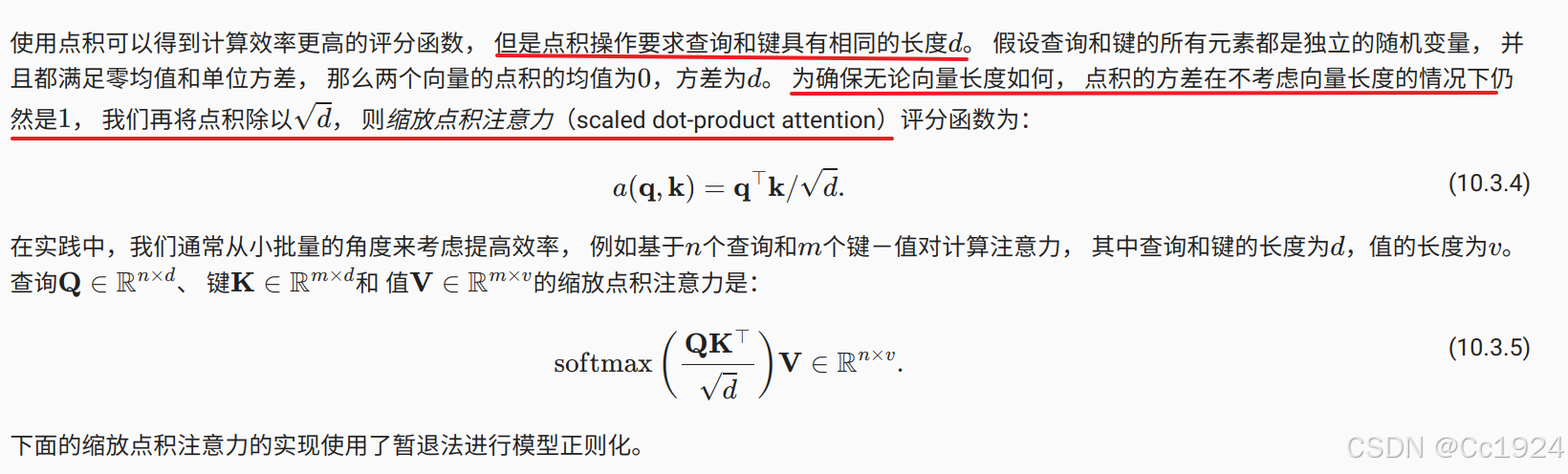
10.3.3. 缩放点积注意力
#@save
class DotProductAttention(nn.Module):
"""缩放点积注意力"""
def __init__(self, dropout, **kwargs):
super(DotProductAttention, self).__init__(**kwargs)
self.dropout = nn.Dropout(dropout)
# queries的形状:(batch_size,查询的个数,d)
# keys的形状:(batch_size,“键-值”对的个数,d)
# values的形状:(batch_size,“键-值”对的个数,值的维度)
# valid_lens的形状:(batch_size,)或者(batch_size,查询的个数)
def forward(self, queries, keys, values, valid_lens=None):
d = queries.shape[-1]
# 设置transpose(1,2)为了交换keys的最后两个维度
scores = torch.bmm(queries, keys.transpose(1,2)) / math.sqrt(d)
self.attention_weights = masked_softmax(scores, valid_lens)
return torch.bmm(self.dropout(self.attention_weights), values)
10.3.4. 小结
-
将注意力汇聚的输出计算可以作为值的加权平均,选择不同的注意力评分函数会带来不同的注意力汇聚操作。
-
当查询和键是不同长度的矢量时,可以使用可加性注意力评分函数。当它们的长度相同时,使用缩放的“点-积”注意力评分函数的计算效率更高。
10.4. Bahdanau 注意力
这个直接去看原文吧,是和 seq2seq 有关的:https://zh.d2l.ai/chapter_attention-mechanisms/bahdanau-attention.html
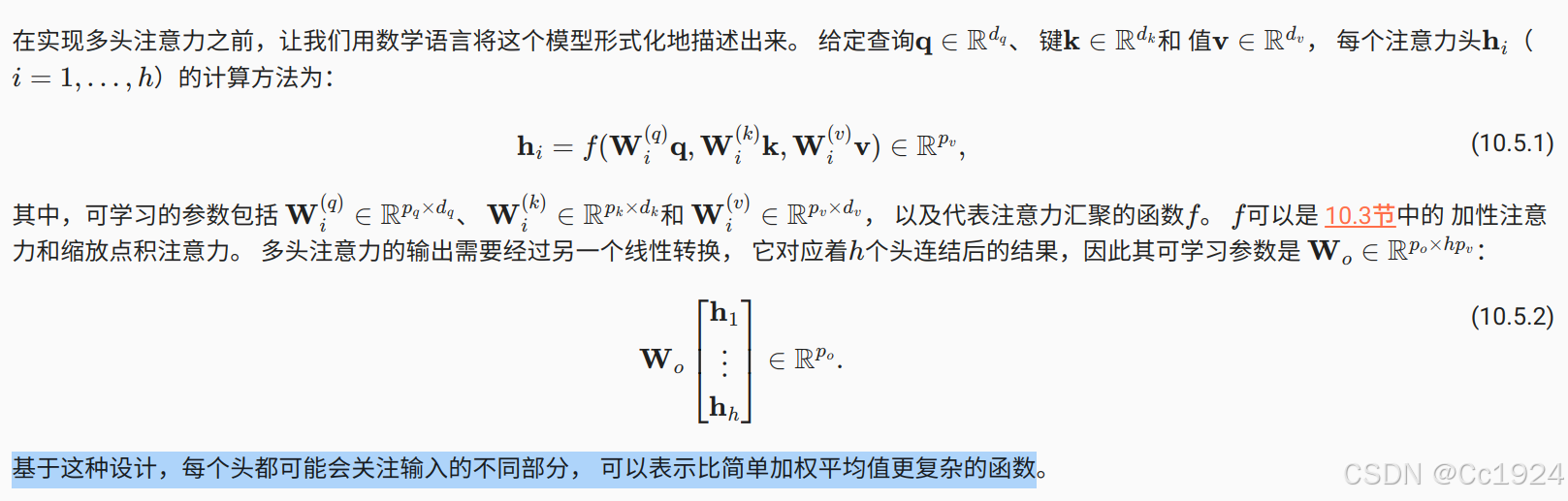
10.5. 多头注意力
在实践中,当给定相同的查询、键和值的集合时, 我们希望模型可以基于相同的注意力机制学习到不同的行为, 然后将不同的行为作为知识组合起来, 捕获序列内各种范围的依赖关系 (例如,短距离依赖和长距离依赖关系)。 因此,允许注意力机制组合使用查询、键和值的不同 **子空间表示(representation subspaces)**可能是有益的。
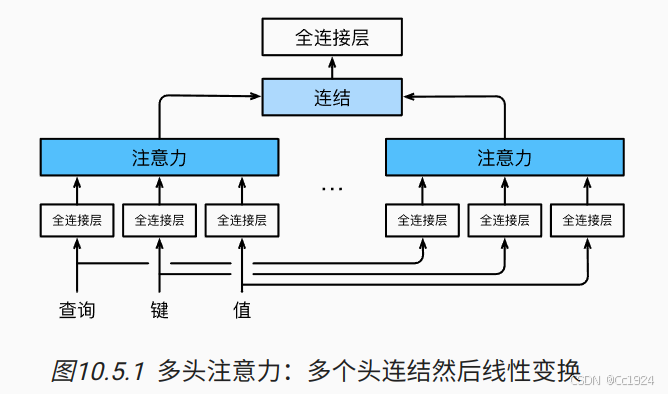
为此,与其只使用单独一个注意力汇聚, 我们可以用独立学习得到的 h 组不同的 线性投影(linear projections)来变换查询、键和值。 然后,这 h 组变换后的查询、键和值将并行地送到注意力汇聚中。 最后,将这 h 个注意力汇聚的输出拼接在一起, 并且通过另一个可以学习的线性投影进行变换, 以产生最终输出。 这种设计被称为多头注意力(multihead attention) (Vaswani et al., 2017)。 对于 h 个注意力汇聚输出,每一个注意力汇聚都被称作一个头(head)。 图10.5.1 展示了使用全连接层来实现可学习的线性变换的多头注意力。
10.5.1. 模型
10.5.2. 实现

解释:上面的 意思就是我们的目的是设置 h 个头,同时每个头需要设置线性变换之后 qkv 的 feature 维度。为了控制计算量,就把 feature 的维度设置为
p
o
/
h
p_o/h
po/h,这样最后 h 个投线性变换之后的 feature 再 cat 起来,维度也就是
p
o
p_o
po,也就是我们在代码中指定的 num_hiddens,这样直接通过这一个 num_hiddens 的变量就控制了最终输出的维度,控制计算量的方式更加直接(不用考虑到底分成了多少个头)
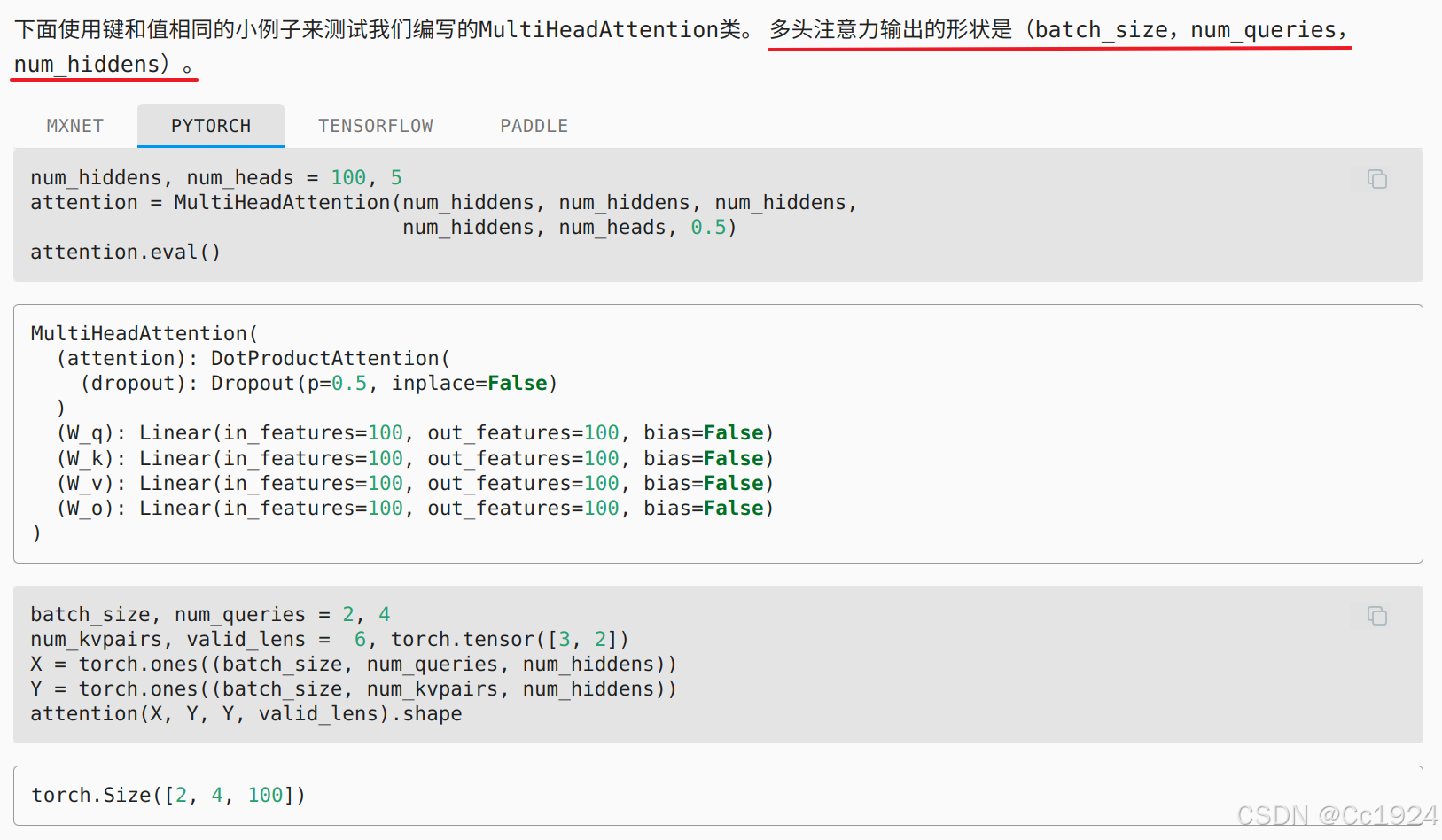
#@save
class MultiHeadAttention(nn.Module):
"""多头注意力"""
def __init__(self, key_size, query_size, value_size, num_hiddens,
num_heads, dropout, bias=False, **kwargs):
super(MultiHeadAttention, self).__init__(**kwargs)
self.num_heads = num_heads
self.attention = d2l.DotProductAttention(dropout)
self.W_q = nn.Linear(query_size, num_hiddens, bias=bias)
self.W_k = nn.Linear(key_size, num_hiddens, bias=bias)
self.W_v = nn.Linear(value_size, num_hiddens, bias=bias)
self.W_o = nn.Linear(num_hiddens, num_hiddens, bias=bias)
def forward(self, queries, keys, values, valid_lens):
# 1. 输入queries,keys,values的形状:
# (batch_size,查询或者“键-值”对的个数,q/k/v feature_dim)
# 2. 经过全连接层之后输出qkv的形状:
# (batch_size,查询或者“键-值”对的个数,num_hiddens)
# 3. 经过transpose_qkv函数变换之后的qkv形状:
# (batch_size*num_heads,查询或者“键-值”对的个数,num_hiddens/num_heads)
# 4. valid_lens 的形状:
# (batch_size,)或(batch_size,查询的个数)
queries = transpose_qkv(self.W_q(queries), self.num_heads)
keys = transpose_qkv(self.W_k(keys), self.num_heads)
values = transpose_qkv(self.W_v(values), self.num_heads)
if valid_lens is not None:
# 在轴0,将第一项(标量或者矢量)复制num_heads次,
# 然后如此复制第二项,然后诸如此类。
valid_lens = torch.repeat_interleave(
valid_lens, repeats=self.num_heads, dim=0)
# output的形状:(batch_size*num_heads,查询的个数,num_hiddens/num_heads)
output = self.attention(queries, keys, values, valid_lens)
# output_concat的形状:(batch_size,查询的个数,num_hiddens)
output_concat = transpose_output(output, self.num_heads)
return self.W_o(output_concat)
为了能够使多个头并行计算, 上面的MultiHeadAttention类将使用下面定义的两个转置函数。 具体来说,transpose_output函数反转了transpose_qkv函数的操作。
#@save
def transpose_qkv(X, num_heads):
"""为了多注意力头的并行计算而变换形状"""
# 输入X的形状:(batch_size,查询或者“键-值”对的个数,num_hiddens)
# 输出X的形状:(batch_size,查询或者“键-值”对的个数,num_heads,num_hiddens/num_heads)
X = X.reshape(X.shape[0], X.shape[1], num_heads, -1)
# 输出X的形状:(batch_size,num_heads,查询或者“键-值”对的个数, num_hiddens/num_heads)
X = X.permute(0, 2, 1, 3)
# 最终输出的形状:(batch_size*num_heads,查询或者“键-值”对的个数, num_hiddens/num_heads)
return X.reshape(-1, X.shape[2], X.shape[3])
#@save
def transpose_output(X, num_heads):
"""逆转transpose_qkv函数的操作"""
X = X.reshape(-1, num_heads, X.shape[1], X.shape[2])
X = X.permute(0, 2, 1, 3)
return X.reshape(X.shape[0], X.shape[1], -1)
注意:上面拆分 num_heads 到 batch 的维度上,其实本意是让线性变换输出的维度是 num_hiddens/num_heads,也就是说这个值才是我们真正想设置的输出的维度。但是为了写代码方便,直接用一个全连接层输出了 num_heads 个头的 num_hiddens/num_heads 维度的 feature,所以这里需要把一次生成的向量空间变换再拆解成多个头的向量,这才是我们的本意。
10.5.3. 小结
- 多头注意力融合了来自于多个注意力汇聚的不同知识,这些知识的不同来源于相同的查询、键和值的不同的子空间表示。
- 基于适当的张量操作,可以实现多头注意力的并行计算。(实际上就是保证每个头的线性变换子空间维度相同,然后把多个头的并行计算放到batch维度上并行)
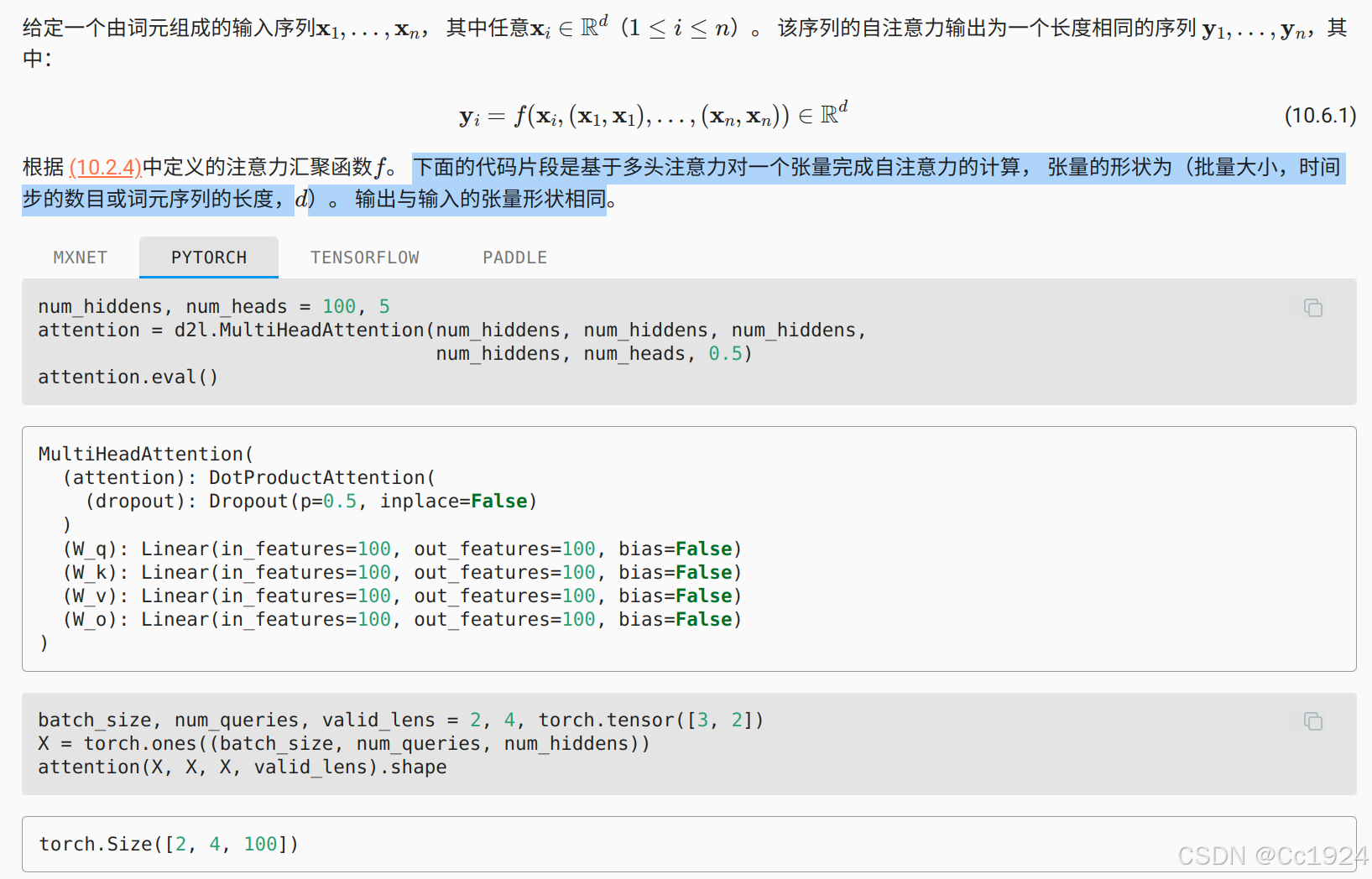
10.6. 自注意力和位置编码
深度学习中,经常使用卷积神经网络(CNN)或循环神经网络(RNN)对序列进行编码。 想象一下,有了注意力机制之后,我们将词元序列输入注意力池化中, 以便同一组词元同时充当查询、键和值。 具体来说,每个查询都会关注所有的键-值对并生成一个注意力输出。 由于查询、键和值来自同一组输入,因此被称为 自注意力(self-attention) (Lin et al., 2017, Vaswani et al., 2017), 也被称为内部注意力(intra-attention) (Cheng et al., 2016, Parikh et al., 2016, Paulus et al., 2017)。 本节将使用自注意力进行序列编码,以及如何使用序列的顺序作为补充信息。
10.6.1. 自注意力
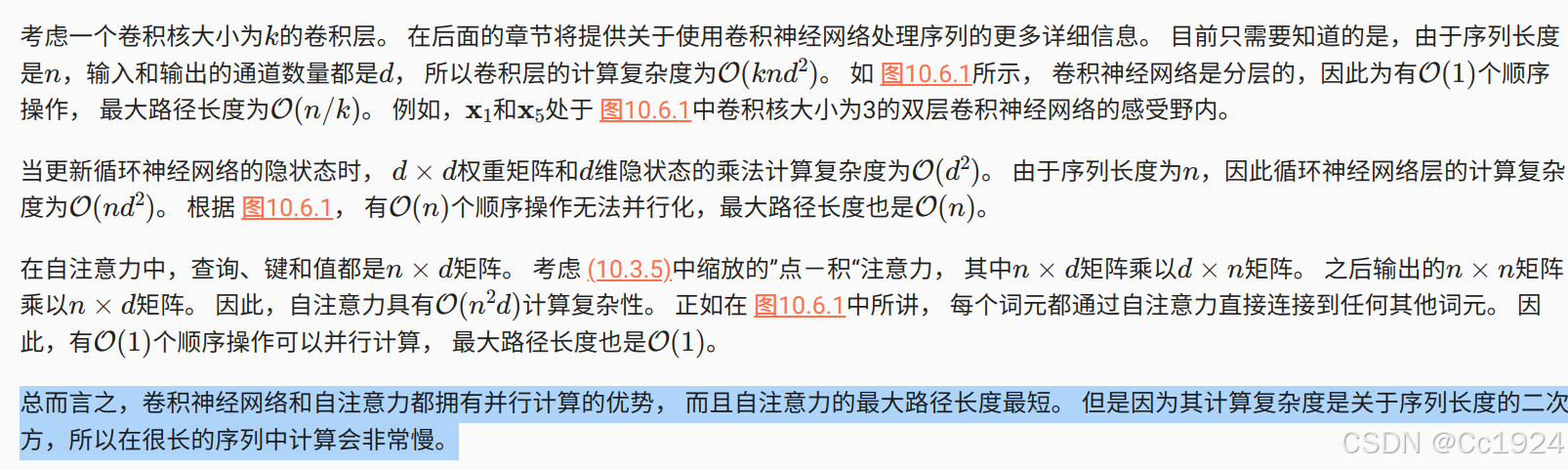
10.6.2. 比较卷积神经网络、循环神经网络和自注意力
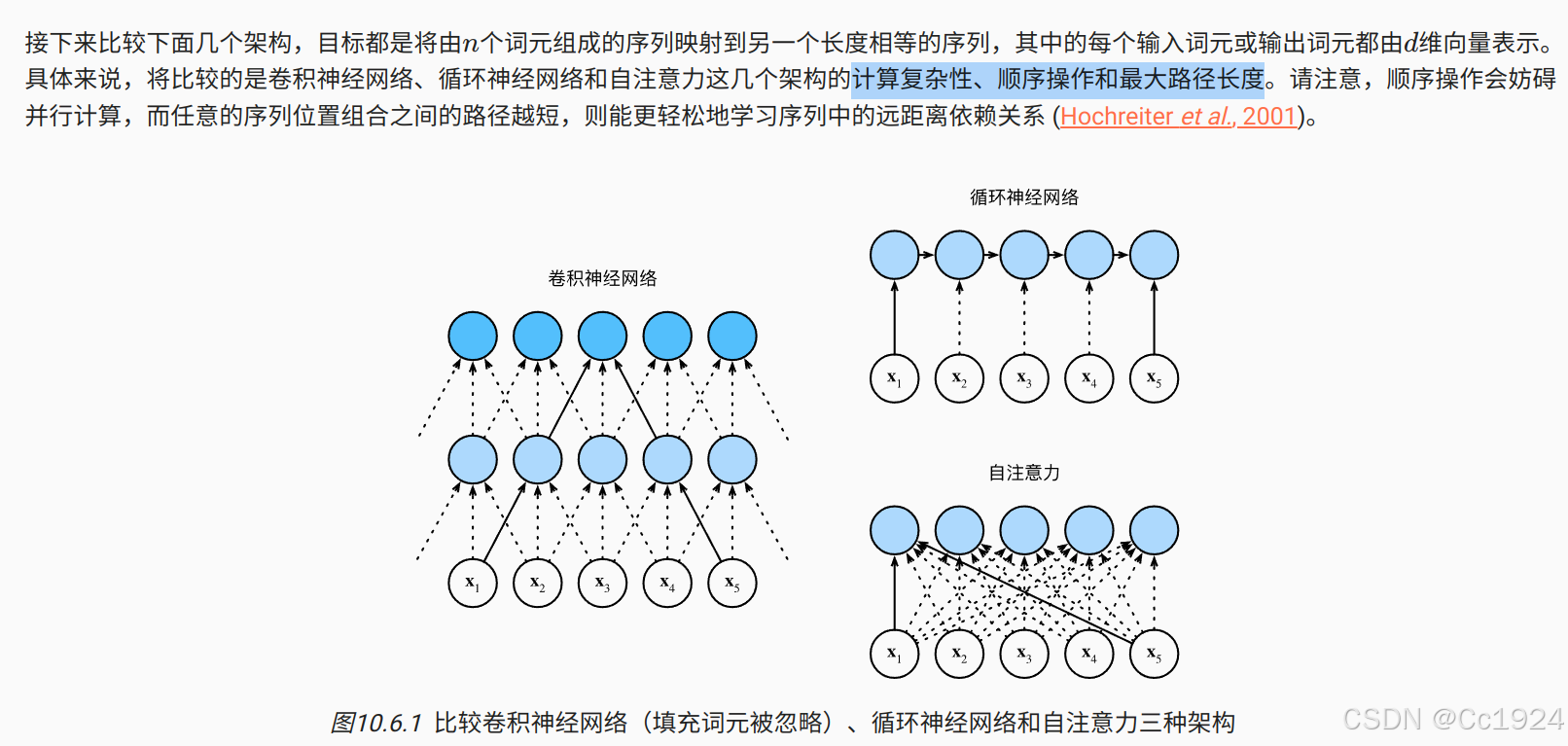
TODO:需要去看一下顺序操作、最大路径长度是什么意思,怎么计算;以及计算复杂度怎么计算。
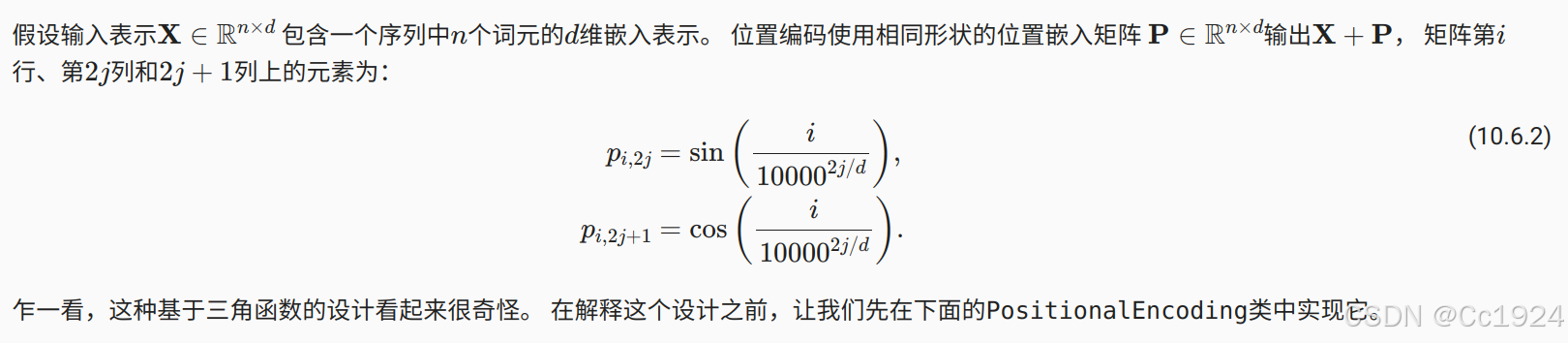
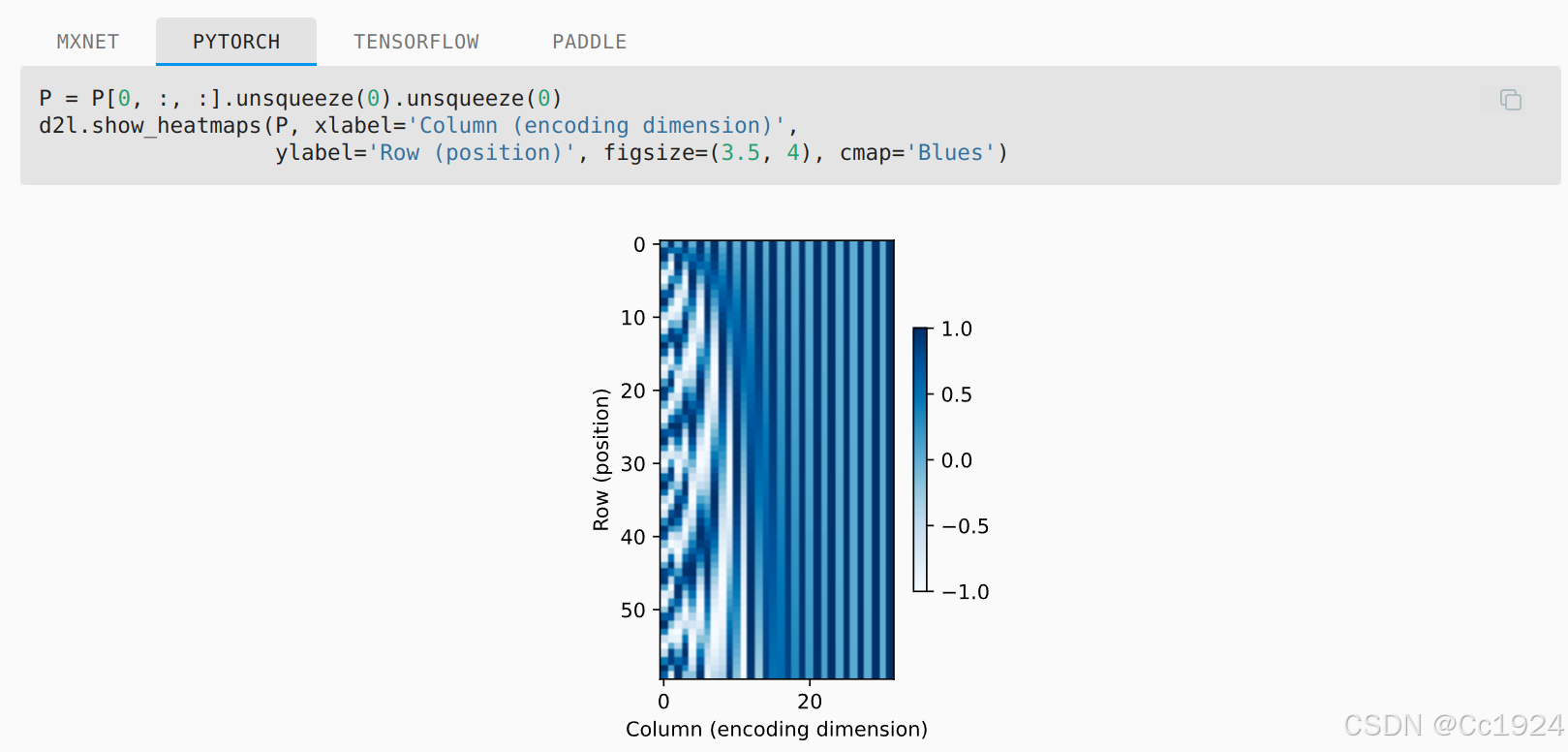
10.6.3. 位置编码
在处理词元序列时,循环神经网络是逐个的重复地处理词元的, 而自注意力则因为并行计算而放弃了顺序操作。 为了使用序列的顺序信息,通过在输入表示中添加 位置编码(positional encoding)来注入绝对的或相对的位置信息。 位置编码可以通过学习得到也可以直接固定得到。 接下来描述的是基于正弦函数和余弦函数的固定位置编码 (Vaswani et al., 2017)。
#@save
class PositionalEncoding(nn.Module):
"""位置编码"""
def __init__(self, num_hiddens, dropout, max_len=1000):
super(PositionalEncoding, self).__init__()
self.dropout = nn.Dropout(dropout)
# 创建一个足够长的P
self.P = torch.zeros((1, max_len, num_hiddens))
X = torch.arange(max_len, dtype=torch.float32).reshape(
-1, 1) / torch.pow(10000, torch.arange(
0, num_hiddens, 2, dtype=torch.float32) / num_hiddens)
self.P[:, :, 0::2] = torch.sin(X)
self.P[:, :, 1::2] = torch.cos(X)
def forward(self, X):
X = X + self.P[:, :X.shape[1], :].to(X.device)
return self.dropout(X)
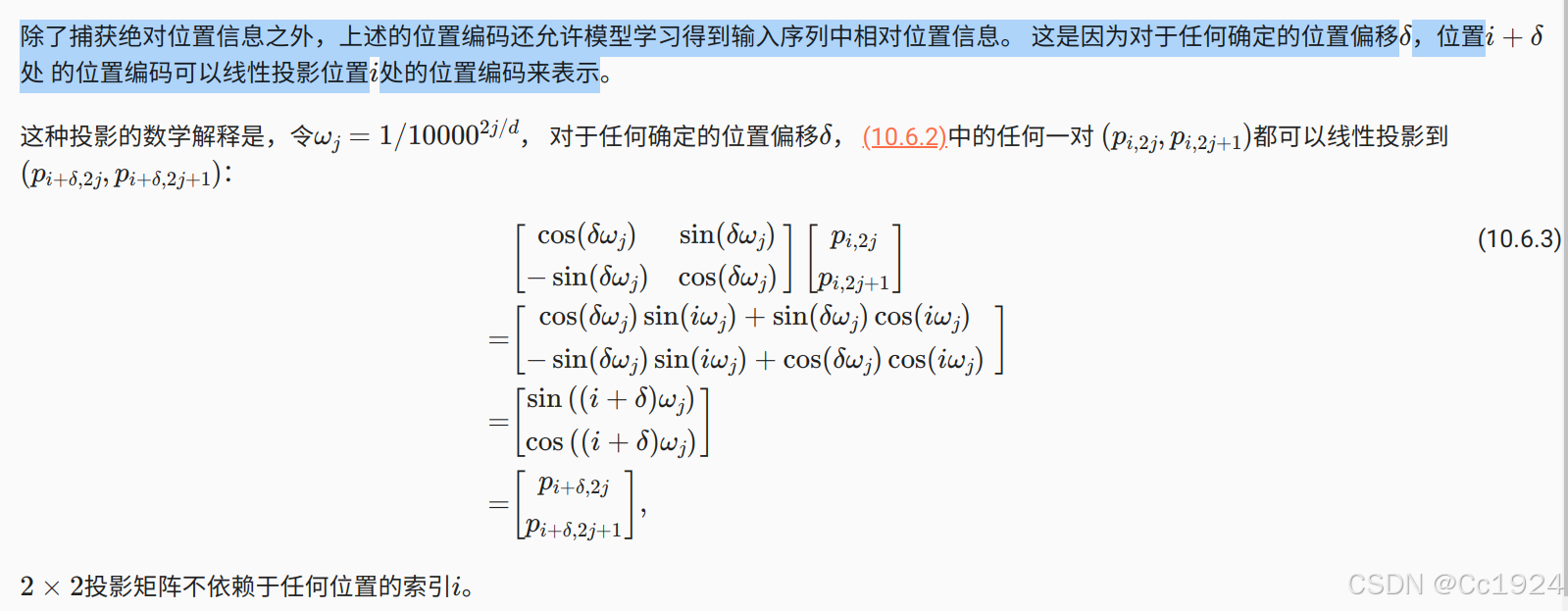
10.6.3.2. 相对位置信息
10.6.4. 小结
- 在自注意力中,查询、键和值都来自同一组输入。
- 卷积神经网络和自注意力都拥有并行计算的优势,而且自注意力的最大路径长度最短。但是因为其计算复杂度是关于序列长度的二次方,所以在很长的序列中计算会非常慢。
- 为了使用序列的顺序信息,可以通过在输入表示中添加位置编码,来注入绝对的或相对的位置信息。
10.7. Transformer
10.6.2节中比较了卷积神经网络(CNN)、循环神经网络(RNN)和自注意力(self-attention)。值得注意的是,自注意力同时具有并行计算和最短的最大路径长度这两个优势。因此,使用自注意力来设计深度架构是很有吸引力的。对比之前仍然依赖循环神经网络实现输入表示的自注意力模型 (Cheng et al., 2016, Lin et al., 2017, Paulus et al., 2017),Transformer模型完全基于注意力机制,没有任何卷积层或循环神经网络层 (Vaswani et al., 2017)。尽管Transformer最初是应用于在文本数据上的序列到序列学习,但现在已经推广到各种现代的深度学习中,例如语言、视觉、语音和强化学习领域。
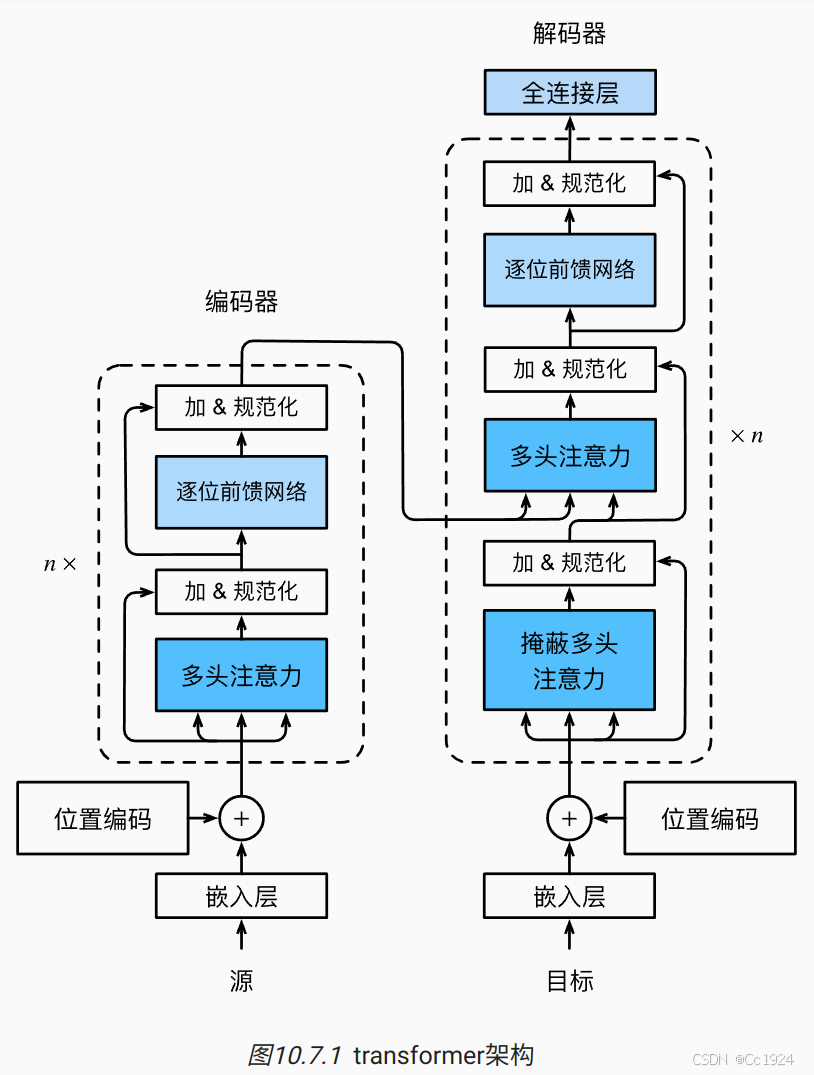
10.7.1. 模型
Transformer作为编码器-解码器架构的一个实例,其整体架构图在 图10.7.1中展示。正如所见到的,Transformer是由编码器和解码器组成的。与 图10.4.1中基于Bahdanau注意力实现的序列到序列的学习相比,Transformer的编码器和解码器是基于自注意力的模块叠加而成的,源(输入)序列和目标(输出)序列的嵌入(embedding)表示将加上位置编码(positional encoding),再分别输入到编码器和解码器中。
10.7.2. 基于位置的前馈网络
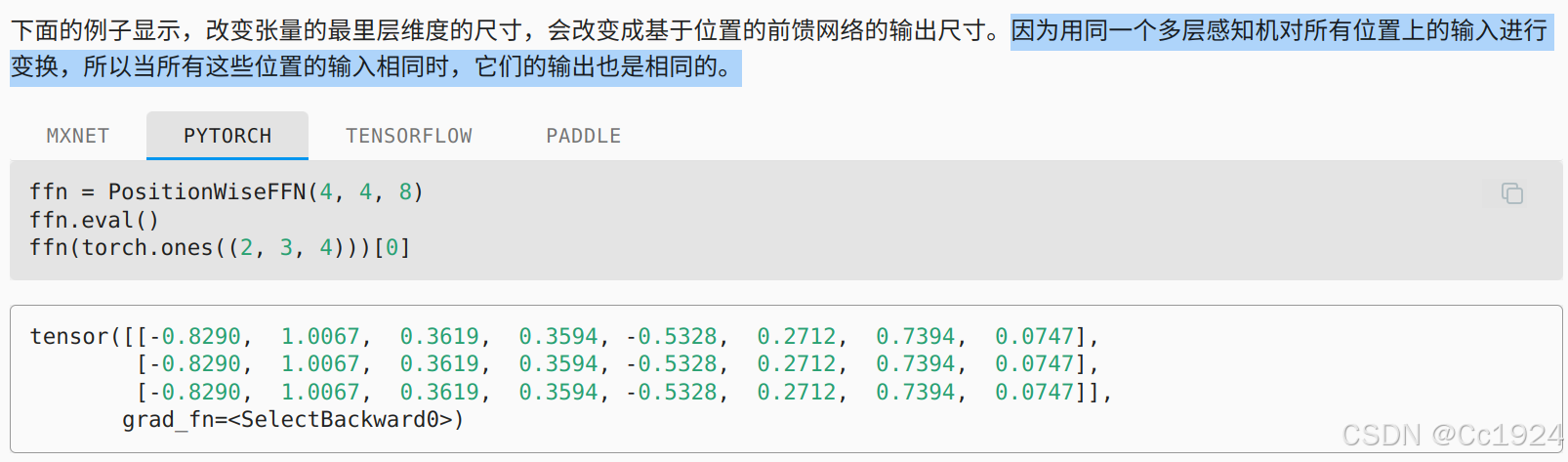
基于位置的前馈网络对序列中的所有位置的表示进行变换时使用的是同一个多层感知机(MLP),这就是称前馈网络是基于位置的(positionwise)的原因。在下面的实现中,输入X的形状(批量大小,时间步数或序列长度,隐单元数或特征维度)将被一个两层的感知机转换成形状为(批量大小,时间步数,ffn_num_outputs)的输出张量。
注意:这里说的所有位置,应该指的就是不同时间步。
#@save
class PositionWiseFFN(nn.Module):
"""基于位置的前馈网络"""
def __init__(self, ffn_num_input, ffn_num_hiddens, ffn_num_outputs,
**kwargs):
super(PositionWiseFFN, self).__init__(**kwargs)
self.dense1 = nn.Linear(ffn_num_input, ffn_num_hiddens)
self.relu = nn.ReLU()
self.dense2 = nn.Linear(ffn_num_hiddens, ffn_num_outputs)
def forward(self, X):
return self.dense2(self.relu(self.dense1(X)))
10.7.3. 残差连接和层规范化
7.5节中解释了在一个小批量的样本内基于批量规范化对数据进行重新中心化和重新缩放的调整。层规范化和批量规范化的目标相同,但层规范化是基于特征维度进行规范化。尽管批量规范化在计算机视觉中被广泛应用,但在自然语言处理任务中(输入通常是变长序列)批量规范化通常不如层规范化的效果好。
现在可以使用残差连接和层规范化来实现AddNorm类。暂退法也被作为正则化方法使用。
#@save
class AddNorm(nn.Module):
"""残差连接后进行层规范化"""
def __init__(self, normalized_shape, dropout, **kwargs):
super(AddNorm, self).__init__(**kwargs)
self.dropout = nn.Dropout(dropout)
self.ln = nn.LayerNorm(normalized_shape)
def forward(self, X, Y):
return self.ln(self.dropout(Y) + X)
残差连接要求两个输入的形状相同,以便加法操作后输出张量的形状相同。

解释:nn.LayerNorm 的用法
- nn.LayerNorm 是 PyTorch 中实现 层归一化(Layer Normalization) 的模块,它对输入张量的最后若干N个维度进行归一化。
- 例如代码为
net = nn.LayerNorm((3, 4)) input = torch.rand(2, 3, 4) output = net(intput) # (2, 3, 4)


- 常见用途
- Transformer 模型:对每个样本的序列维度(如 (seq_len, feature_dim))归一化。
- 小批量场景:当BatchNorm不稳定时(如批量大小=1),LayerNorm是替代方案。
10.7.4. 编码器
有了组成Transformer编码器的基础组件,现在可以先实现编码器中的一个层。下面的EncoderBlock类包含两个子层:多头自注意力和基于位置的前馈网络,这两个子层都使用了残差连接和紧随的层规范化。
#@save
class EncoderBlock(nn.Module):
"""Transformer编码器块"""
def __init__(self, key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens, num_heads,
dropout, use_bias=False, **kwargs):
super(EncoderBlock, self).__init__(**kwargs)
self.attention = d2l.MultiHeadAttention(
key_size, query_size, value_size, num_hiddens, num_heads, dropout,
use_bias)
self.addnorm1 = AddNorm(norm_shape, dropout)
self.ffn = PositionWiseFFN(
ffn_num_input, ffn_num_hiddens, num_hiddens)
self.addnorm2 = AddNorm(norm_shape, dropout)
def forward(self, X, valid_lens):
Y = self.addnorm1(X, self.attention(X, X, X, valid_lens))
return self.addnorm2(Y, self.ffn(Y))
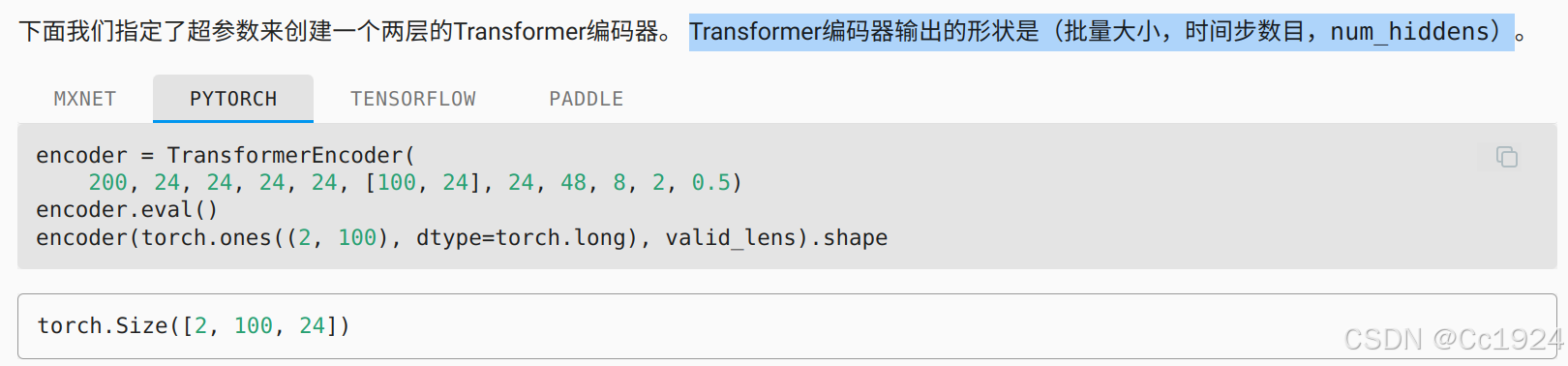
下面实现的Transformer编码器的代码中,堆叠了num_layers个EncoderBlock类的实例。由于这里使用的是值范围在 -1 和 1 之间的固定位置编码,因此通过学习得到的输入的嵌入表示的值需要先乘以嵌入维度的平方根进行重新缩放,然后再与位置编码相加。
#@save
class TransformerEncoder(d2l.Encoder):
"""Transformer编码器"""
def __init__(self, vocab_size, key_size, query_size, value_size,
num_hiddens, norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, num_layers, dropout, use_bias=False, **kwargs):
super(TransformerEncoder, self).__init__(**kwargs)
self.num_hiddens = num_hiddens
self.embedding = nn.Embedding(vocab_size, num_hiddens)
self.pos_encoding = d2l.PositionalEncoding(num_hiddens, dropout)
self.blks = nn.Sequential()
for i in range(num_layers):
self.blks.add_module("block"+str(i),
EncoderBlock(key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, dropout, use_bias))
def forward(self, X, valid_lens, *args):
# 因为位置编码值在-1和1之间,
# 因此嵌入值乘以嵌入维度的平方根进行缩放,
# 然后再与位置编码相加。
X = self.pos_encoding(self.embedding(X) * math.sqrt(self.num_hiddens))
self.attention_weights = [None] * len(self.blks)
for i, blk in enumerate(self.blks):
X = blk(X, valid_lens)
self.attention_weights[
i] = blk.attention.attention.attention_weights
return X
10.7.5. 解码器
如 图10.7.1所示,Transformer解码器也是由多个相同的层组成。在DecoderBlock类中实现的每个层包含了三个子层:解码器自注意力、“编码器-解码器”注意力和基于位置的前馈网络。这些子层也都被残差连接和紧随的层规范化围绕。
正如在本节前面所述,在掩蔽多头解码器自注意力层(第一个子层)中,查询、键和值都来自上一个解码器层的输出。关于序列到序列模型(sequence-to-sequence model),在训练阶段,其输出序列的所有位置(时间步)的词元都是已知的;然而,在预测阶段,其输出序列的词元是逐个生成的。因此,在任何解码器时间步中,只有生成的词元才能用于解码器的自注意力计算中。为了在解码器中保留自回归的属性,其掩蔽自注意力设定了参数dec_valid_lens,以便任何查询都只会与解码器中所有已经生成词元的位置(即直到该查询位置为止)进行注意力计算。
class DecoderBlock(nn.Module):
"""解码器中第i个块"""
def __init__(self, key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens, num_heads,
dropout, i, **kwargs):
super(DecoderBlock, self).__init__(**kwargs)
self.i = i
self.attention1 = d2l.MultiHeadAttention(
key_size, query_size, value_size, num_hiddens, num_heads, dropout)
self.addnorm1 = AddNorm(norm_shape, dropout)
self.attention2 = d2l.MultiHeadAttention(
key_size, query_size, value_size, num_hiddens, num_heads, dropout)
self.addnorm2 = AddNorm(norm_shape, dropout)
self.ffn = PositionWiseFFN(ffn_num_input, ffn_num_hiddens,
num_hiddens)
self.addnorm3 = AddNorm(norm_shape, dropout)
def forward(self, X, state):
# X:每一个decoder块的输入query
# state:每个decoder块计算时需要用到的其他变量,主要是cross_attention的地方用到的encoder的输出
enc_outputs, enc_valid_lens = state[0], state[1]
# 1. 训练阶段,输出序列的所有词元都在同一时间处理, 因此state[2][self.i]初始化为None。
# 注意:初始化为None的意思就是走下面的if分支,从而自注意力的qkv都是输入的query(也就是这里的X)
# 2. 预测阶段,输出序列是通过词元一个接着一个解码的,因此state[2][self.i]包含着直到当前时间步第i个块解码的输出表示
# 注意:就是走下面的else分支, 其实这里自注意力的qkv还是输入的query,但是推理的时候是一个个地输出的,所以这里需要把之前缓存的state[2][self.i]和当前的query X进行拼接
if state[2][self.i] is None:
key_values = X
else:
# axis=1的维度就是时间步的维度,即num_steps
key_values = torch.cat((state[2][self.i], X), axis=1)
state[2][self.i] = key_values
if self.training:
batch_size, num_steps, _ = X.shape
# dec_valid_lens的开头:(batch_size,num_steps),
# 其中每一行是[1,2,...,num_steps]
dec_valid_lens = torch.arange(
1, num_steps + 1, device=X.device).repeat(batch_size, 1)
else:
dec_valid_lens = None
# 自注意力,qkv都是输入的query(也就是X)
X2 = self.attention1(X, key_values, key_values, dec_valid_lens)
Y = self.addnorm1(X, X2)
# 编码器-解码器注意力。
# enc_outputs的开头:(batch_size,num_steps,num_hiddens)
Y2 = self.attention2(Y, enc_outputs, enc_outputs, enc_valid_lens)
Z = self.addnorm2(Y, Y2)
return self.addnorm3(Z, self.ffn(Z)), state
为了便于在“编码器-解码器”注意力中进行缩放点积计算和残差连接中进行加法计算,编码器和解码器的特征维度都是num_hiddens。
decoder_blk = DecoderBlock(24, 24, 24, 24, [100, 24], 24, 48, 8, 0.5, 0)
decoder_blk.eval()
X = torch.ones((2, 100, 24))
state = [encoder_blk(X, valid_lens), valid_lens, [None]]
decoder_blk(X, state)[0].shape # torch.Size([2, 100, 24])
现在我们构建了由num_layers个DecoderBlock实例组成的完整的Transformer解码器。最后,通过一个全连接层计算所有vocab_size个可能的输出词元的预测值。解码器的自注意力权重和编码器解码器注意力权重都被存储下来,方便日后可视化的需要。
class TransformerDecoder(d2l.AttentionDecoder):
def __init__(self, vocab_size, key_size, query_size, value_size,
num_hiddens, norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, num_layers, dropout, **kwargs):
super(TransformerDecoder, self).__init__(**kwargs)
self.num_hiddens = num_hiddens
self.num_layers = num_layers
self.embedding = nn.Embedding(vocab_size, num_hiddens)
self.pos_encoding = d2l.PositionalEncoding(num_hiddens, dropout)
self.blks = nn.Sequential()
for i in range(num_layers):
self.blks.add_module("block"+str(i),
DecoderBlock(key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, dropout, i))
self.dense = nn.Linear(num_hiddens, vocab_size)
def init_state(self, enc_outputs, enc_valid_lens, *args):
return [enc_outputs, enc_valid_lens, [None] * self.num_layers]
def forward(self, X, state):
# 注意这里*math.sqrt(self.num_hiddens)是为了把[-1, 1]的位置编码缩放到和输入有相同的标准差
X = self.pos_encoding(self.embedding(X) * math.sqrt(self.num_hiddens))
# range(2)是指解码器中的self-attention和cross-attention
self._attention_weights = [[None] * len(self.blks) for _ in range (2)]
for i, blk in enumerate(self.blks):
X, state = blk(X, state)
# 解码器自注意力权重
self._attention_weights[0][
i] = blk.attention1.attention.attention_weights
# “编码器-解码器”自注意力权重
self._attention_weights[1][
i] = blk.attention2.attention.attention_weights
# 最后经过decoder之后的x再接一个全连接层,得到vocab_size个可能的输出词元的预测值
return self.dense(X), state
# property是把函数变成类的属性,直接通过.方法就可以访问
@property
def attention_weights(self):
return self._attention_weights
10.7.7. 小结
- Transformer是编码器-解码器架构的一个实践,尽管在实际情况中编码器或解码器可以单独使用。
- 在Transformer中,多头自注意力用于表示输入序列和输出序列,不过解码器必须通过掩蔽机制来保留自回归属性。
- Transformer中的残差连接和层规范化是训练非常深度模型的重要工具。
- Transformer模型中基于位置的前馈网络使用同一个多层感知机,作用是对所有序列位置的表示进行转换。
解释:什么叫所有序列位置的表示?
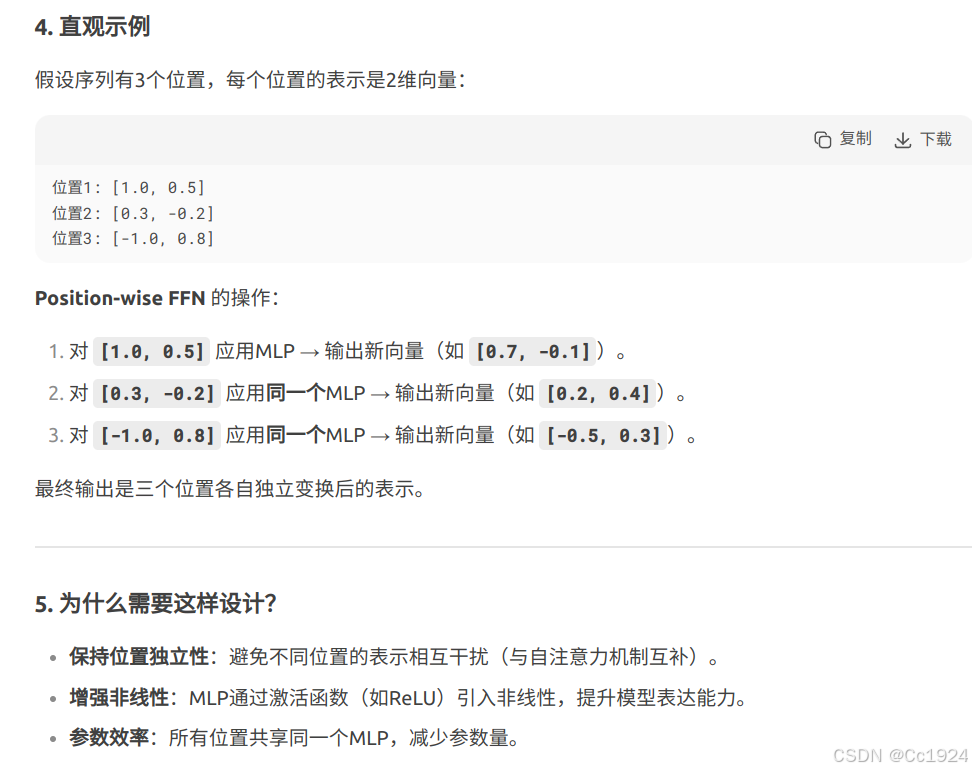
总结
- 所有序列位置的表示 = 输入序列中每个单词/时间步的高维向量。
- Position-wise FFN = 对每个位置的向量独立应用同一个MLP,实现特征变换。
- 注意:实际上这里每个位置独立通过MLP,意思其实类似把每个位置(时间步)放到batch维度上经过MLP,变成(num_steps* batch_size, num_hiddens),经过 MLP之后再 reshape成(batch_size, num_steps, new_num_hiddens)。而不是把所有位置先在特征维度上cat在经过MLP,比如 (batch_size, num_steps * num_hiddens) -> (batch_size, num_steps, new_num_hiddens),这样的话就相当于不同位置(时间步)的变量之间有交互了。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









