import pygame
import math
import random
import numpy as np
from scipy.signal import convolve2d # 修正卷积函数导入
# 初始化参数
# 调小窗口尺寸
WIDTH, HEIGHT = 800, 600
NEST_POS = (WIDTH // 2, HEIGHT // 2)
FOOD_SOURCES = [(200, 200), (WIDTH - 200, HEIGHT - 200), (WIDTH // 2, HEIGHT - 300)] # 增加食物源
NUM_ANTS = 1000
PHEROMONE_DECAY = 0.985
FOOD_CAPACITY = 10000
MAX_SPEED = 2.2
class Ant:
def __init__(self):
self.pos = np.array(NEST_POS, dtype=np.float32)
self.angle = random.uniform(0, 2 * math.pi)
self.speed = MAX_SPEED * random.uniform(0.8, 1.2)
self.has_food = False
self.search_time = 0
self.pheromone_strength = 1.0
def sense_environment(self, grid):
x, y = int(self.pos[0]), int(self.pos[1])
return grid[
max(0, x - 1):min(WIDTH, x + 2),
max(0, y - 1):min(HEIGHT, y + 2)
]
def follow_pheromone(self, sensed, homing=False):
try:
if sensed.size == 0:
self.random_walk()
return
if homing:
weights = sensed
else:
weights = 1 / (sensed + 1e-6) # 避免除零错误
total = np.sum(weights)
if total > 0:
probs = weights.flatten() / total
choice = np.random.choice(len(probs), p=probs)
dy, dx = np.unravel_index(choice, sensed.shape)
target_vec = np.array([dx - 1, dy - 1]) # 转换为方向向量
if np.linalg.norm(target_vec) > 0:
new_angle = math.atan2(target_vec[1], target_vec[0])
self.angle = new_angle + random.uniform(-0.1, 0.1)
except:
self.random_walk()
def random_walk(self):
self.angle += random.uniform(-0.5, 0.5)
self.speed = MAX_SPEED * random.uniform(0.7, 1.1)
def move(self, food_grid, pheromone_grid):
# 环境感知
sensed = self.sense_environment(pheromone_grid if self.has_food else food_grid)
# 行为决策
if self.has_food:
self.follow_pheromone(sensed, homing=True)
pheromone_grid[int(self.pos[0]), int(self.pos[1])] += 0.5 # 留下返巢信息素
else:
if self.search_time > 150:
self.random_walk()
else:
self.follow_pheromone(sensed)
# 位置更新
self.pos += np.array([
math.cos(self.angle) * self.speed,
math.sin(self.angle) * self.speed
])
self.pos = np.clip(self.pos, [10, 10], [WIDTH - 10, HEIGHT - 10])
# 边界反弹
if self.pos[0] <= 10 or self.pos[0] >= WIDTH - 10:
self.angle = math.pi - self.angle
if self.pos[1] <= 10 or self.pos[1] >= HEIGHT - 10:
self.angle = -self.angle
self.search_time += 1
class Simulation:
def __init__(self):
pygame.init()
self.screen = pygame.display.set_mode((WIDTH, HEIGHT))
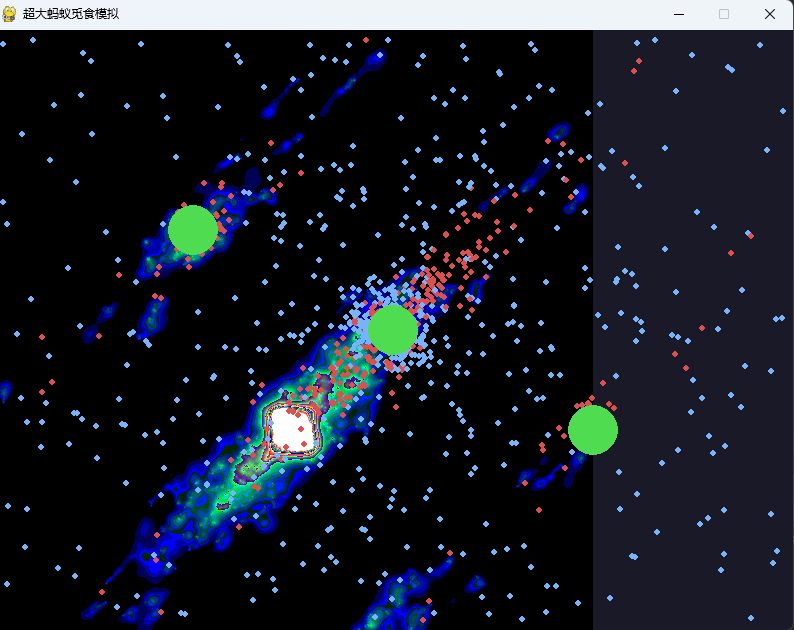
pygame.display.set_caption("超大蚂蚁觅食模拟")
self.clock = pygame.time.Clock()
self.ants = [Ant() for _ in range(NUM_ANTS)]
self.food_grid = np.zeros((WIDTH, HEIGHT))
for pos in FOOD_SOURCES:
self.food_grid[pos[0] - 20:pos[0] + 20, pos[1] - 20:pos[1] + 20] = FOOD_CAPACITY
self.pheromone_grid = np.zeros((WIDTH, HEIGHT))
def update_pheromones(self):
self.pheromone_grid *= PHEROMONE_DECAY
kernel = np.array([[0.05, 0.1, 0.05],
[0.1, 0.4, 0.1],
[0.05, 0.1, 0.05]])
self.pheromone_grid = convolve2d(
self.pheromone_grid, kernel, mode='same', boundary='symm'
)
def draw(self):
self.screen.fill((25, 25, 40))
# 绘制信息素
pheromone_surface = pygame.surfarray.make_surface(
np.clip(self.pheromone_grid * 50, 0, 255).astype(np.uint8).T
)
self.screen.blit(pheromone_surface, (0, 0))
# 绘制蚂蚁
for ant in self.ants:
color = (220, 80, 80) if ant.has_food else (120, 180, 250)
pygame.draw.circle(self.screen, color, ant.pos.astype(int), 3)
# 绘制巢穴和食物
pygame.draw.circle(self.screen, (250, 250, 100), NEST_POS, 20)
for pos in FOOD_SOURCES:
pygame.draw.circle(self.screen, (80, 220, 80), pos, 25)
pygame.display.flip()
def run(self):
running = True
while running:
for event in pygame.event.get():
if event.type == pygame.QUIT:
running = False
for ant in self.ants:
ant.move(self.food_grid, self.pheromone_grid)
# 食物交互
x, y = int(ant.pos[0]), int(ant.pos[1])
if not ant.has_food and self.food_grid[x, y] > 0:
ant.has_food = True
ant.search_time = 0
self.food_grid[x, y] -= 1
self.pheromone_grid[x, y] += 1.0 # 留下觅食信息素
elif ant.has_food and np.linalg.norm(ant.pos - NEST_POS) < 25:
ant.has_food = False
self.pheromone_grid[x, y] += 3.0
self.update_pheromones()
self.draw()
self.clock.tick(60)
pygame.quit()
if __name__ == "__main__":
sim = Simulation()
sim.run()

























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









