




简介
说明:具体看正点原子电机例程文件
代码例程排故:
1.接线错误
2.电压不够
3.电源限流了
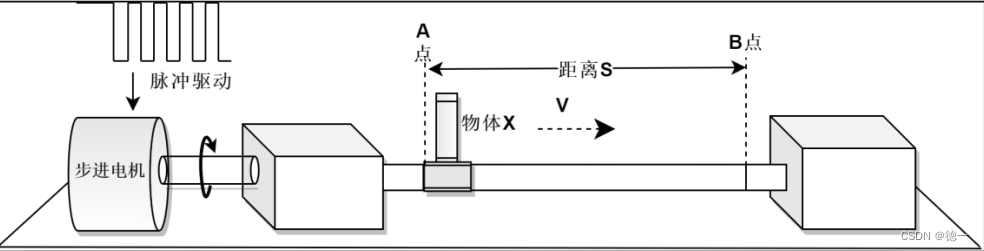
步进电机因其无需反馈就能对位置和速度进行控制而在工业自动化设备中的应用极为广泛,如下图所示,假设该装置使用步进电机实现物体 X 的移动,系统要求从 A 点出发,到 B点停止,移动的时间越短越好且系统稳定。
根据步进电机的特性,最大程度加大电机转速(提高脉冲频率),则到达 B 点的时间就越短,但是如果施加脉冲频率太高,超过了步进电机的最小启动频率,则会造成电机内部的反向电动势的阻尼作用,转子与定子之间的磁反应将跟随不上电信号的变化,导致堵转或者丢步,滑块连动都没动,非常尴尬!
所以要求在电机启动时需要一个低速,但为了实现系统要求,在启动之后慢慢的升高速度,实现一个加速的过程,那如果在达到终点前一直在加速,就又有另外一个问题,到达终点时速度太快就会导致刹不住,出现过冲现象,为了防止这个现象我们需要在达到终点前的一段距离提前减速,使得滑块到达终点时速度刚好为 0,即从最高速度一直减至停止。如果在加速的过程中,从启动速度到目标速度的加减速是以一定的比例进行加速/减速,则可以将这个过程描述为如下图所示:
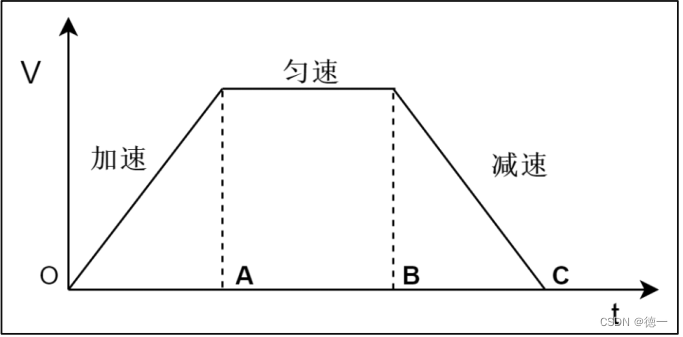
⚫ 在 OA 加速过程中,由低于步进电机的启动频率开始启动(模型中由 0 启动),以固定的加速度增加速度到目标值;
⚫ 在 AB 匀速过程中,以最大速度匀速运动;
⚫ 在 BC 减速部分中,以加速度不变的速度递减到 0;
这种算法是一种在加速过程和减速过程中加速度不变的匀变速控制算法。
原理分析
那接着就是我们的重头戏了,如何实现梯形加减速算法?步进电机的速度由脉冲频率决定,在匀速运动的过程中,脉冲的频率是固定不变的,根据步进电机特性,每给一个脉冲,电机就会步进固定的距离(将角度转换为距离),知道了 A 点到 B 的距离,就可以知道步进电机需要走多少步,然后让控制器输出所需个数且固定频率的脉冲就行。
在加减速段的过程中,速度是不断的改变的,所以需改变脉冲的频率,让电机在加速时给高频率的脉冲,减速时给低频率脉冲。那具体下一个变化的脉冲的周期是多少?虽然从 A点到 B 点所需要的总步数(脉冲)不变,但在加速阶段时需要多少步数?多少步之后需要减速?减速阶段要步进多少步?所以接下来我们一个个解答这些疑问,前方高能,请做好心理准备
需要先明确要求解的未知量有哪些?
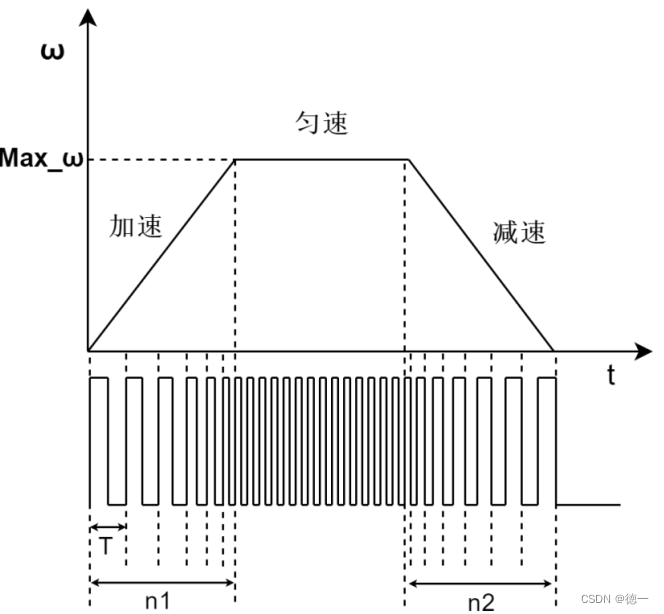
(1)加速阶段时需要多少脉冲数?使用 n1 进行表示
(2)减速阶段要步进多少脉冲数?使用 n2 进行表示
(3)下一个变化的脉冲的周期是多少?使用 T 进行表示
因为要实现加减速效果,所以输送给电机的脉冲的周期是变化的,只要确定下一个脉冲的周期,并且确定加速阶段和减速阶段需要提供多少个脉冲,然后让控制器一个一个把脉冲送出去即可。如下图所示:
在进行加减速前我们必须要确定的参数量有如下:
(1)电机需要步进的距离,使用 step 表示 ;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2224
2224

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









