






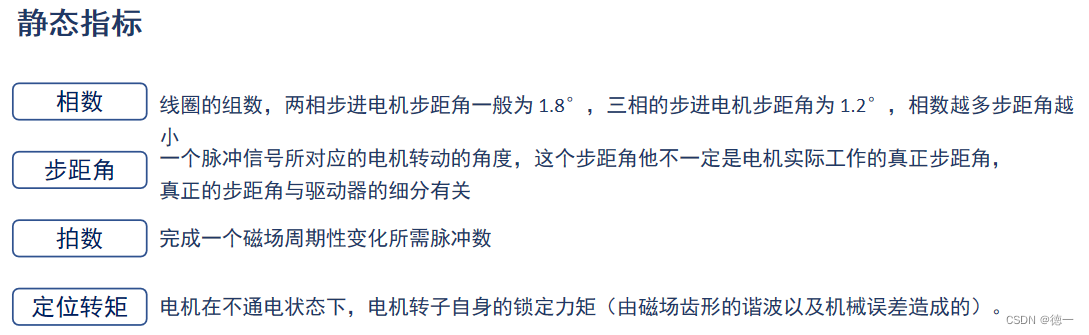
简介
在原子STM32G474电机开发板开发
步进电机是一种把电脉冲信号转换为角位移或线位移的电动机。在非超载且不超频的情况下,电机的旋转位置只取决于脉冲个数,转速只取决脉冲信号的频率
分类
① 按照磁激励进行分类:永磁式、反应式(磁阻式)、混合式
② 按相数区分:相数是指电机内部的线圈的组数,常用的有二相、三相、四相、五相步进电机

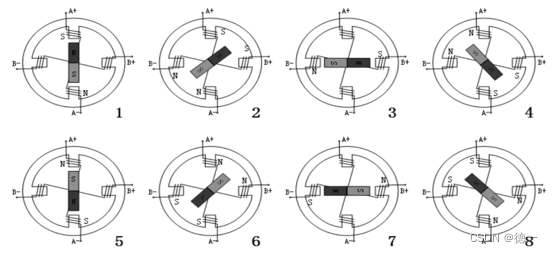
单极性
单极性整步驱动

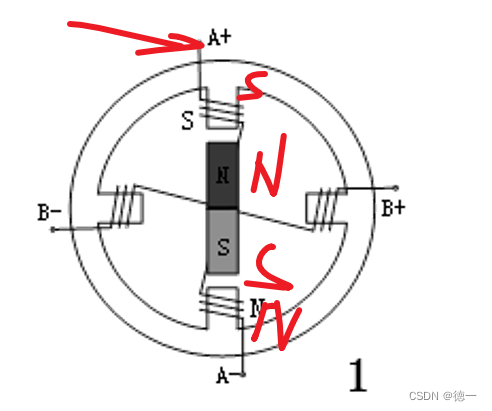
按照线圈组数划分这里是四相电机
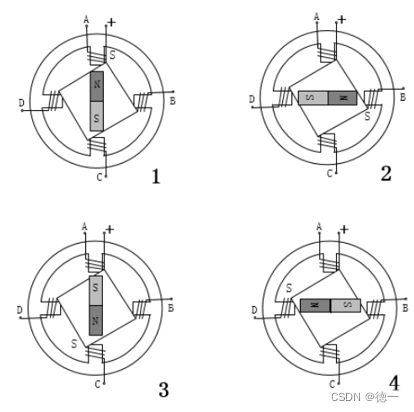
单极性整步驱动,四相四拍运行方式,这里每次只有一个磁场,磁场强度小,力矩小 。

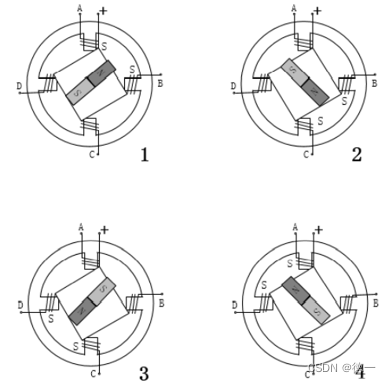
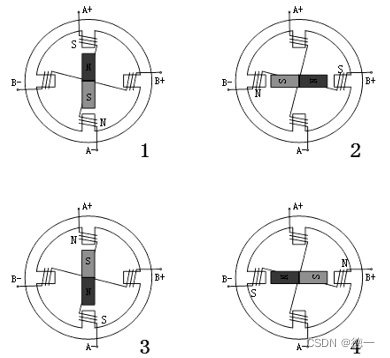
双线圈通电,相比上一个同一时间有两个磁场,磁场强度更大,力矩更大 。
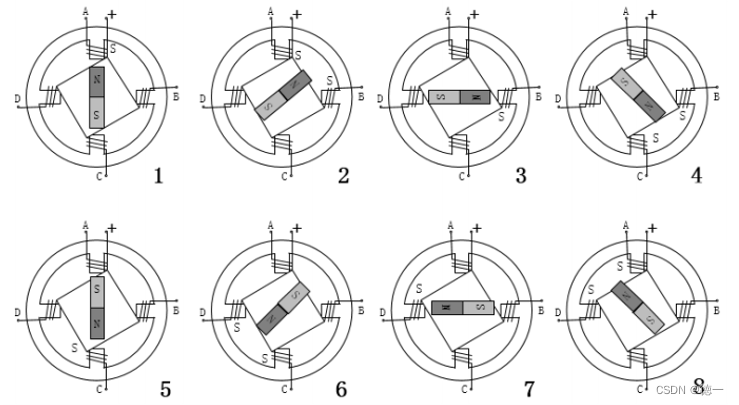
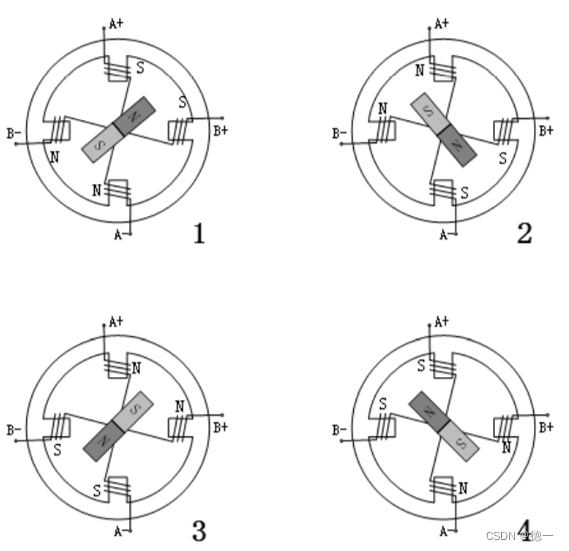
单极性半步驱动
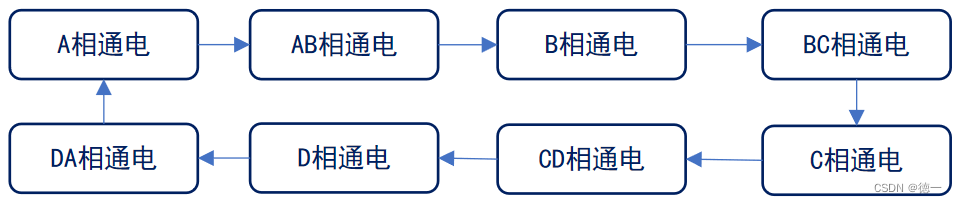
转子每次只走半步 ,所以这也被称为半步驱动,与整步相比半步的旋转方式旋转起来更加的顺滑。
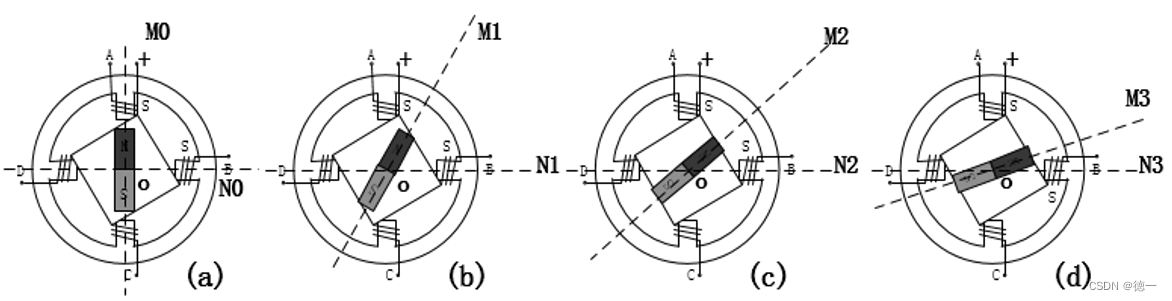
双极性
力矩会比单极性驱动大
可以看到,这里只有两组导线,A和B两相。当通A相时,最上面s极与转子的N极,最下面为N极与转子的S极,故力矩会比单极性驱动大。
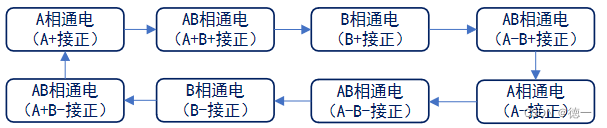
双极性整步驱动

下面这个磁场强度更大,力矩更大

下面这个的转动角度更细分
分类方式的总结
以上是电机分类介绍,以及转动方式,但是细分仍旧不够。
细分驱动
为了对电机实现更细分的转动,引入以下操作
细分驱动简介
细分驱动:将步距角以电流分配方法进行细分化的技术
原理:磁场强度和电流大小成正比
如果Ia = Ib 那么转子将停在相邻两个线圈的中间,如果不相等,转子将停在电流较大的一侧
通过改变输入电流的比例,就可以比原来更小的步距角进行驱动
可进行超微小角度,更加平滑的运转,有效地降低振动和噪音的驱动方法。
步进电机驱动器
控制定子绕组周期性、交替得电,进而控制步进电机一步一步的向前运动的这个控制器就是步进电机驱动器。
有细分功能的步进驱动器可以改变步进电机的固有步距角,达到更大的控制精度、降低振动及提高输出转矩
电机驱动器在taobao买TB6600的杂牌就行
特点:采用9~42VDC 供电, 输出峰值电流可达 5.0A, 适合驱动常用的 42mm、 57mm 两相混合式步进电机,超高分辨率微步进,最大支持32 细分.
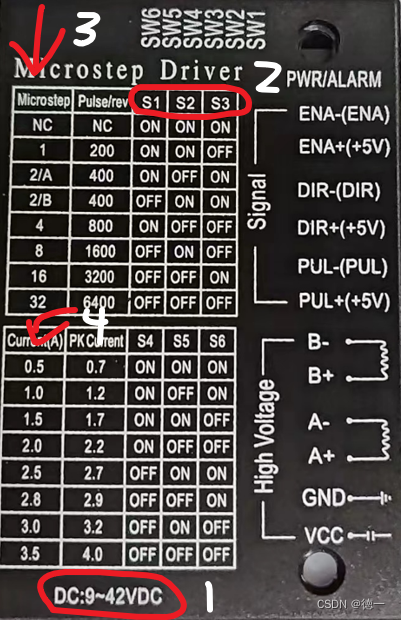
步进电机驱动板,1是电压范围,2是拨码开关(S1----S6),如下图,3是细分,4是电流
S1-S3拨码开关控制的是细分值,S4-S6控制的是电流,有的驱动器还可以选择半流或全流。
如果我设置细分为32,电流1.5,如下图拨码
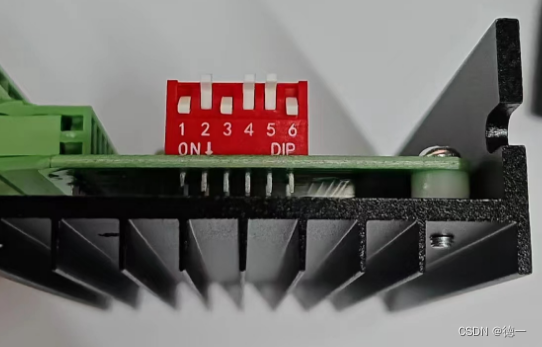

注意:拨码开关必须断开电源情况下才可拨动
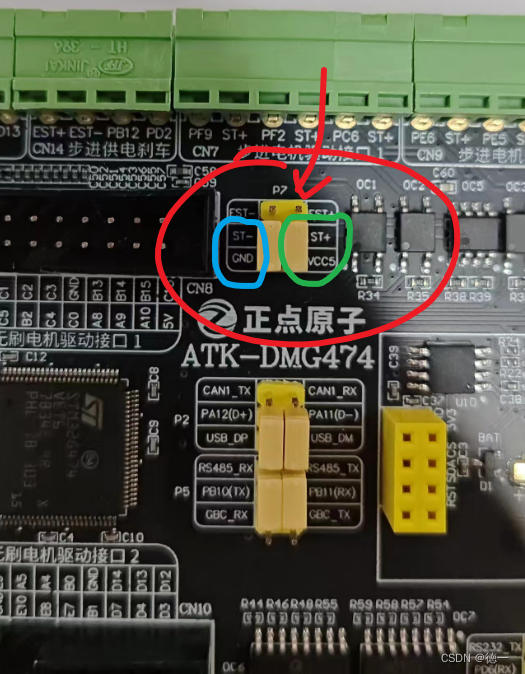
原理图解析
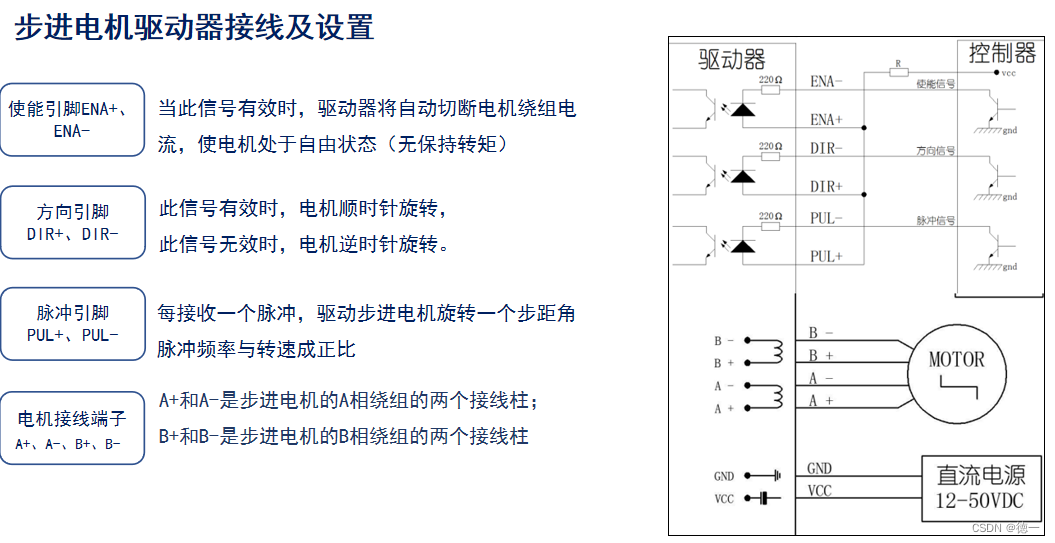
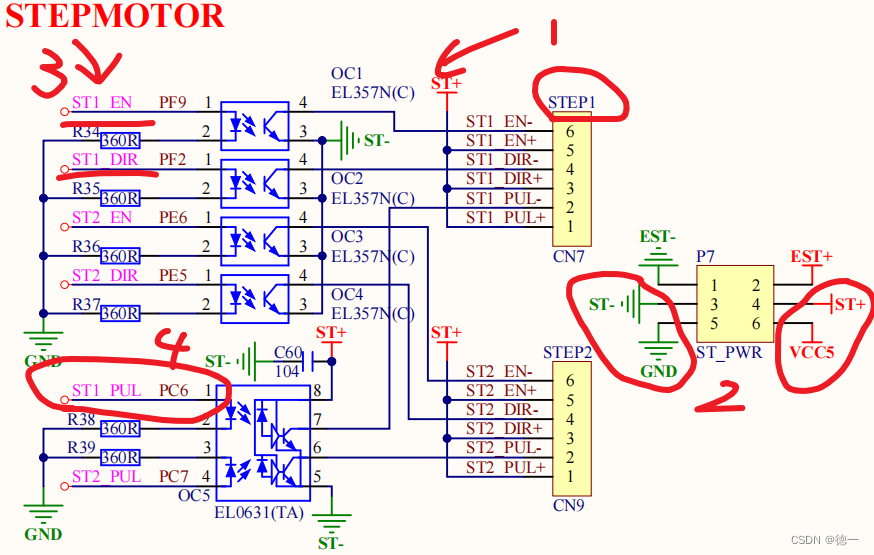
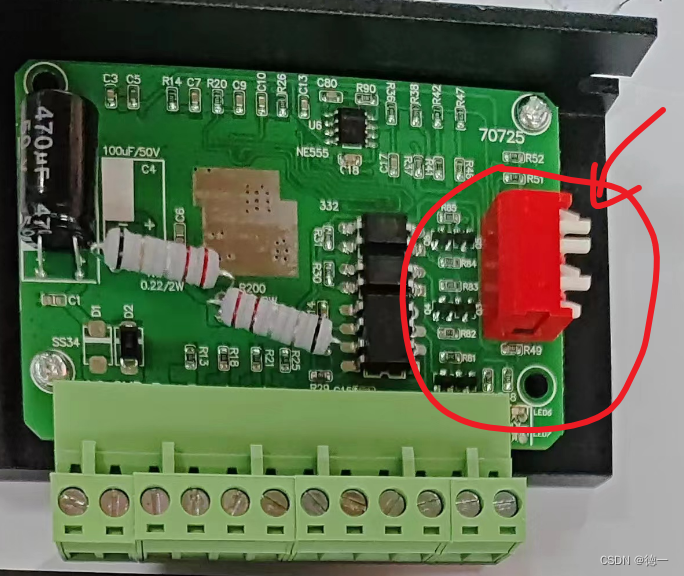
在原理图上,步进电机接口有两个,这里以ST1接口为例:标1这里接的是共阳极,那么只需要控制对应的-为低电平来让它有效;标2这里是一个端子可以用跳线帽,将ST+与VCC5相接,当然可以选择ST+与外部电源接,不使用板载5V,ST-这里需要接地;标3这里ST1为使能接口,DIR为电机正反转;标4这里为脉冲pwm,这里接的高速光耦,上面蓝色的为普通光耦。















 408
408











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









