










为Cortex-M4编写优化的DSP代码
本节展示如何使用优化指南和DSP指令来开发优化代码。我们看看Biquad(双二阶)滤波器,FFT蝴蝶操作和FIR滤波器。对于每个例子,我们都从通用的C代码开始,然后在应用优化策略时将其映射到Cortex-M4 DSP指令。
Biquad(双二阶)滤波器
Biquad双二阶滤波器是一种二阶递归或IIR滤波器。
双二阶滤波器是双二阶(两个极点和两个零点)的IIR滤波器。
双二阶滤波器在整个音频处理中用于均衡、音调控制、响度补偿、图形均衡器、交叉器等。高阶滤波器可以用Biquad的二阶部分来构造。
在许多应用程序中,Biquad滤波器是处理链中计算最密集的部分。它们也类似于在控制系统中使用的PID控制器,并且在本节中开发的许多技术直接应用于PID控制器。
二元滤波器是一个线性时不变系统。当滤波器的输入是正弦波时,输出是频率相同但幅度和相位不同的正弦波。输入和输出之间的幅度、相位关系称为滤波器的频率响应。二元滤波器有五个系数,频率响应由这些系数决定。通过改变系数,可以实现低通(lowpass)、高通(highpass)、带通(bandpass)、架子(shelf,分高架和低架)和陷波滤波器(notch,档位过滤器)。
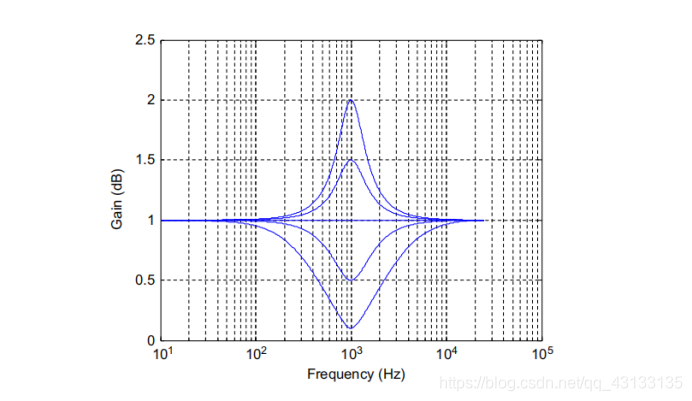
例如,图21.3显示了音频“峰值滤波器”的幅度响应随着系数的变化而变化。滤波器系数通常由设计方程或使用工具如MATLAB生成。罗伯特·布里斯托-约翰逊已经为广泛的滤波器类型提供了计算Biquad系数的SUseful设计公式。
图21.3典型的二元滤波器的幅值响应。这种类型的滤波器被称为“峰值(peaking)滤波器”,提高或削减频率约1khz。图中显示了几个中心增益为0.1的变量。0.5。1.0。1.5。和2.0
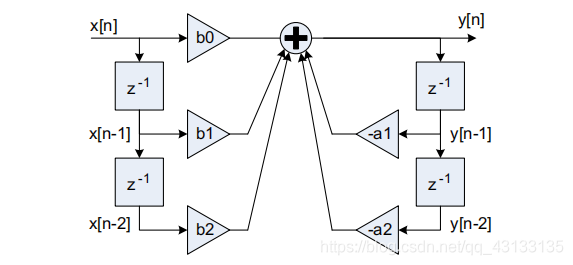
直接形式I实现的Biquad滤波器结构如图21.4所示。输入 x [ n ] x[n] x[n]到达并输入两条样本延迟线。标记为 z − 1 z^{-1} z−1的盒子表示一个样本延迟。图的左侧为前馈处理,右侧为反馈处理。因为Biquad滤波器包含反馈,所以它也被称为递归滤波器。一个直接形式I的Biquad滤波器有5个系数,4个状态变量,每个输出样本总共取5个MACs。
直接形式I Biauad滤波器。这实现了一个二阶过滤器,是一个用于更高阶过滤器的构造块
由于图21.4所示的系统是线性的、不受时间影响的,所以我们可以切换前馈和反馈部分,如图21.5所示。通过这种改变,反馈和前馈部分的延迟线都采用相同的输入,因此可以合并。这将导致如图21.6所示的结构。这被称为直接形式II。直接形式II滤波器有五个系数,两个状态变量,每个输出样本总共需要5个MAC。直接形式I和直接形式ll滤波器在数学上是等价的。
在该图中,滤波器的前馈和反馈部分已经交换,两个延迟链接收相同的输入,可以组合如下图所示

与直接形式I相比,直接形式II过滤器的明显优势在于,它需要的状态变量数量只有前者的一半。每种结构的其他好处更加微妙。
如果你研究直接形式I滤波器,你会注意到输入状态变量保留了输入的延迟版本。类似地,输出状态变量包含输出的延迟版本。因此,如果过滤器的增益不超过1.0,那么状态变量在直接形式I将永远不会溢出。
另一方面,直接形式II滤波器中的状态变量与滤波器的输入或输出 没有直接关系。在实践中,直接形式II状态变量比滤波器的输入和输出具有更高的动态范围。因此,即使滤波器的增益不超过1.0,直接形式II中的状态变量也有可能超过1.0。
由于上述属性,直接形式I实现更适合于定点实现(更好的数值行为),而直接形式II更适合于浮点实现(更少的状态变量)。
用于计算使用直接形式II实现的Biquad滤波器单级的标准C代码如下所示。该函数通过过滤器处理总共的blockSize大小样本。过滤器的输入来自缓冲区inPtr[],输出写到outPtr[]。使用浮点运算:
// b0, b1, b2, a1, and a2 are the filter coefficients.
// a1 and a2 are negated.
// stateA, stateB, and stateC represent intermediate state
variables.
for (sample = 0; sample < blockSize; sample++)
{
stateA = *inPtr++ + a1*stateB + a2*stateC;
*outPtr++ = b0*stateA + b1*stateB + b2*stateC;
stateC = stateB;//先保存stateB信息
stateB = stateA;//更新新的stateB信息
}
// Persist state variables for the next call
state[0] = stateB;
state[1] = stateC;
带领中间状态变量stateA、stateB和stateC如图21.6所示。接下来,我们将检查函数的内循环,看看需要多少循环。我们将把操作分解为独立的Cortex-M4指令:
stateA = *inPtr++; // Data fetch [2 cycles]
stateA += a1*stateB; // MAC with result used in next inst [4 cycles]
stateA += a2*stateC; // MAC with result used in next inst [4 cycles]
out = b0*stateA; // Mult with result used in next inst [2 cycles]
out += b1*stateB; // MAC with result used in next inst [4 cycles]
out += b2*stateC; // MAC with result used in next inst [4 cycles]
*outPtr++ = out; // Data store [2 cycles]
stateC = stateB; // Register move [1 cycle]
stateB = stateA; // Register move [1 cycle]
// Loop overhead [3 cycles]
全部合在一起,通用C代码的内部循环总共需要每个示例执行27个周期。 优化函数的第一步是将MAC指令拆分为单独的乘法和加法。 然后重新排序计算,以便在下一个周期中不需要浮点操作的结果。 一些附加变量用于保存中间结果:
stateA = *inPtr++ // Data fetch [2 cycles]
prod1 = a1*stateB; // Mult [1 cycle]
prod2 = a2*stateC; // Mult [1 cycle]
stateA += prod1; // Addition [1 cycle]
stateA += prod2; // Add [1 cycle]
prod3 = b0*stateA // Mult [1 cycle]
prod4 = b1*stateB; // Mult [1 cycle]
out = b2*stateC; // Mult [1 cycle]
out += prod4; // Add [1 cycle]
out += prod3; // Add [1 cycle]
stateC = stateB; // Register move [1 cycle]
stateB = stateA; // Register move [1 cycle]
*outPtr++ = out; // Data store [2 cycles]
// Loop overhead [3 cycles]
直接形式II Biquad结构。这需要5次乘法,但只有两次延迟。在做浮点处理时,它是首选的

这些变化将Biquad的内环从27周期减少到18周期。 这是朝着正确的方向迈出的一步,但有三种技术可以应用于Biquad,以便进一步改进:
- 通过仔细使用中间变量来消除寄存器的移动。 结构中从上到下的状态变量最初是:
stateA, stateB, stateC
在计算第一个输出之后,状态变量向右移动。 我们不会真正地转移变量,而是使用排序来重用它们:
stateC, stateA, stateB
下一次迭代后,状态变量重新排序为:
stateB, stateC, stateA
最后,在第四次迭代之后,变量是:
stateA, stateB, stateC
循环然后重复,它有一个自然周期3个样本。 也就是说,如果我们从开始:
stateA, stateB, stateC
然后,在计算了3个输出样本之后,我们将返回到:
stateA, stateB, stateC - 将循环展开3倍,以减少循环开销。 循环开销3个周期将摊销超过3个样本。
- 组加载和存储指令。 在上面的代码中,负载和存储指令是隔离的,每个指令需要2个周期。 通过加载和存储几个结果,第二次和随后的内存访问只需要1个周期。 由于循环展开,结果代码现在要长一些:
//3个一组进行加载
in1 = *inPtr++; // Data fetch [2 cycles]
in2 = *inPtr++; // Data fetch [1 cycles]
in3 = *inPtr++; // Data fetch [1 cycles]
prod1 = a1*stateB; // Mult [1 cycle]
prod2 = a2*stateC; // Mult [1 cycle]
stateA = in1+prod1; // Addition [1 cycle]
prod4 = b1*stateB; // Mult [1 cycle]
stateA += prod2; // Add [1 cycle]
out1 = b2*stateC; // Mult [1 cycle]
prod3 = b0*stateA; // Mult [1 cycle]
out1 += prod4; // Add [1 cycle]
out1 += prod3; // Add [1 cycle]
prod1 = a1*stateA; // Mult [1 cycle]
prod2 = a2*stateB; // Mult [1 cycle]
stateC = in2+prod1; // Addition [1 cycle]
prod4 = b1*stateA; // Mult [1 cycle]
stateC += prod2; // Add [1 cycle]
out2 = b2*stateB; // Mult [1 cycle]
prod3 = b0*stateC; // Mult [1 cycle]
out2 += prod4; // Add [1 cycle]
out2 += prod3; // Add [1 cycle]
prod1 = a1*stateC; // Mult [1 cycle]
prod2 = a2*stateA; // Mult [1 cycle]
stateB = in3+prod1; // Addition [1 cycle]
prod4 = b1*stateC; // Mult [1 cycle]
stateB += prod2; // Add [1 cycle]
out3 = b2*stateA; // Mult [1 cycle]
prod3 = b0*stateB; // Mult [1 cycle]
out3 += prod4; // Add [1 cycle]
out3 += prod3; // Add [1 cycle]
outPtr++ = out1; // Data store [2 cycles]
outPtr++ = out2; // Data store [1 cycles]
outPtr++ = out3; // Data store [1 cycles]
// Loop overhead [3 cycles]
计数周期我们最终有38个周期来计算3个输出样本或每个样本12.67个周期。 这里介绍的代码对长度为3个样本的倍数的向量进行操作。 为了通用性,代码需要另一个阶段,它处理剩余的1或2个样本;这不显示。
有可能进一步优化吗?我们可以把环展开多远?该滤波器的核心算术运算包括5次乘法和4次加法。这些操作,当正确命令避免摊位在Cortex-M4上需要9个周期。内存加载和存储每个最多需要1个周期。把这些放在一起,一个Biquad的绝对最小循环数是每个样本11个循环。这假设所有的数据加载和存储都是1个周期,并且没有循环开销。如果我们进一步展开内部循环,我们会发现:
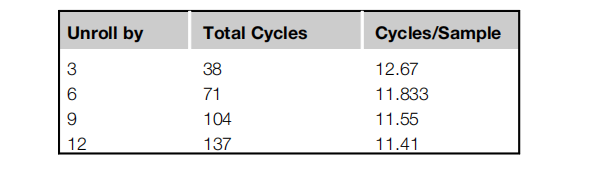
在某些情况下,处理器用完了保存输入和输出变量的中间寄存器,就不可能再得到进一步的好处了。展开3或6个样本是合理的选择。除此之外,收益微乎其微。
快速傅里叶变换
快速傅里叶传输(FFT)是一种用于频域处理、压缩和快速滤波算法的关键信号处理算法。FFT实际上是一种计算离散傅里叶变换(DFT)的快速算法。DFT变换将N点时域信号x[nl]分解为N个单独的频率分量x[kl],其中每个分量都是一个复值,包含幅度和相位信息。
长度为N的有限长度序列的DFT定义为:
X
[
K
]
=
∑
n
=
0
N
−
1
x
[
n
]
W
N
k
n
X[K ]=\sum_{n=0}^{N-1}x[n]W_N^{kn}
X[K]=∑n=0N−1x[n]WNkn ,
k
=
0
,
1
,
2
,
.
.
.
,
N
−
1
k =0 ,1, 2, ...,N-1
k=0,1,2,...,N−1
其中 W N k W_N^{k} WNk是一个复值,表示 k k k次单位根:
W N K = e − j 2 π k / N = c o s ( 2 π k ) − j ∗ s i n ( 2 π k ) W_N^K=e^{-j2\pi k /N}=cos(2\pi k)-j *sin(2\pi k) WNK=e−j2πk/N=cos(2πk)−j∗sin(2πk)n次单位根是n次幂为1的复数,他们位于复平面的单位元上,构成正n边形的顶点。其乘法构成n阶乘法群
从频域到时域的逆变换几乎是相同的:
x
[
n
]
=
1
N
∑
n
=
0
N
−
1
X
[
k
]
W
N
−
k
n
x[n ]=\frac{1}{N}\sum_{n=0}^{N-1}X[k]W_N^{-kn}
x[n]=N1∑n=0N−1X[k]WN−kn ,
n
=
0
,
1
,
2
,
.
.
.
,
N
−
1
n =0 ,1, 2, ...,N-1
n=0,1,2,...,N−1
直接实现上述公式需要O(N2)操作来计算所有N个正变换或反变换样本。使用FFT,我们将看到这简化为O(NlogN)操作。对于较大的N值,节省的费用是可观的,而且FFT已经使许多新的信号处理应用成为可能。FFT最初由Cooley和Tukey在1965年描述(文章),这里可以找到一个很好的FFT算法的一般参考。
当长度N是一个合数(能够被1以外的整数整除),可以表示为小因子的乘积时,FFTs通常工作得最好:
N
=
N
1
×
N
2
×
N
3
.
.
.
N
N = N_1×N_2×N_3 ... N
N=N1×N2×N3...N
最简单的算法是那些N是2的幂的情况,它们被称为radix-2变换(2点变换)。
FFT采用“分而治之”算法,N点FFT的计算使用两个单独的N/2点变换和一些额外的操作。fft主要有两类:时域抽取和频域抽取。实时抽取算法通过结合偶数和奇数时域样本的N/2点FFT计算N点FFT。频率抽取算法是相似的,计算偶数和奇数频域样本使用两个N/2点FFTs。这两种算法都有相似数量的数学运算。CMSIS库使用频率抽取算法,我们将着重讨论这些算法。8点radix-2抽取频率FFT的第一阶段如图21.7所示。
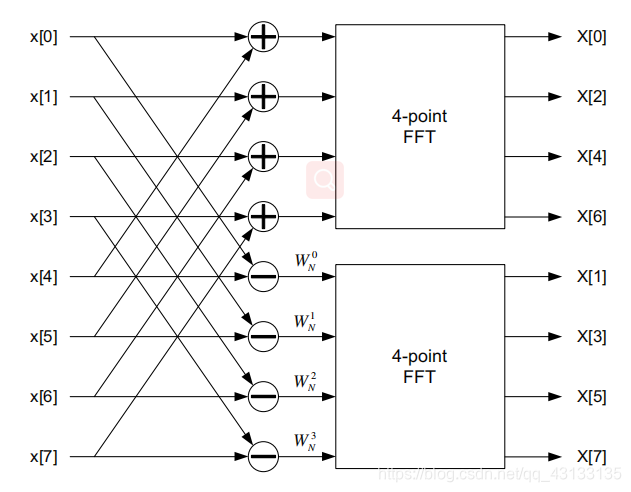
8点变换是使用两个单独的4点变换计算的。前面定义的乘法因子W出现在上面,其值称为旋转因子。为了提高速度,旋转因子是预先计算并存储在数组中,而不是在FFT函数本身中计算。继续分解,4点fft被分解为两个2点fft。最后,计算四个两点fft。最终的结构如图21.8所示。注意,一个8点FFT的总体结构, 有3个阶段,每个阶段由4只蝴蝶组成。
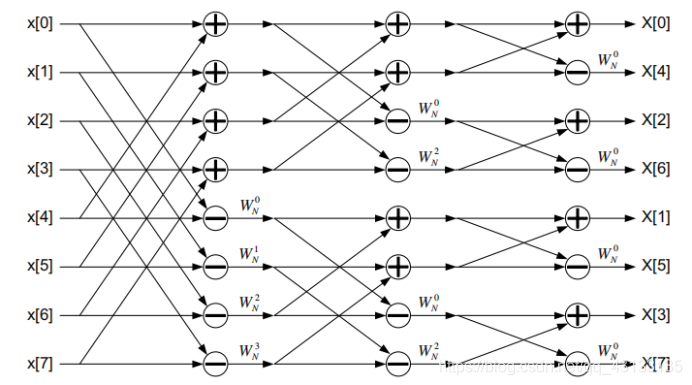
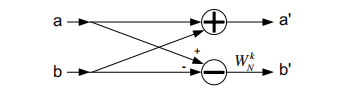
每个阶段由4个蝴蝶操作组成,图21.9显示了单个蝴蝶每个蝴蝶都包含复杂的加法、减法和乘法。
蝴蝶操作的一个特性是它可以在内存中就地完成。也就是说,获取复值a和b,执行操作,然后将结果放回数组相同位置的内存中。事实上,整个FFT可以在输入输入的相同缓冲区中生成输出。
输入如图21.8是在正常秩序和收益按顺序从x[0]到x[7]。对处理后的输出进行置乱,其顺序称为逆位顺序:为了理解顺序,将索引0 - 7写入二进制,将位翻转180度,再转换回十进制:
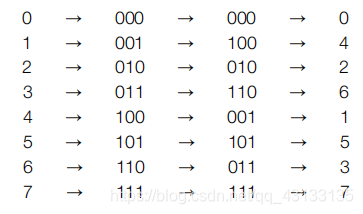
位反向排序是就地处理的一个自然副作用。大多数FFT算法(包括在CMSIS DSP库中的算法)提供了将输出值重新排序回到顺序顺序的选项。
蝴蝶操作是FFT算法的核心,我们将在本节中分析和优化单个蝴蝶的计算。 八点FFT需要3*4=12只蝴蝶。 一般来说,长度为N的radix-2(基数为2)FFT有 l o g 2 N log_2N log2N阶段,每个阶段有N=2只蝴蝶,总共有 ( N / 2 ) l o g 2 N (N/2)log_2N (N/2)log2N只蝴蝶。
分解成蝴蝶产生FFT的 O ( N l o g 2 N ) O(Nlog_2N) O(Nlog2N)操作计数。 除了蝴蝶本身,FFT还需要索引,以跟踪算法的每个阶段应该使用哪些值。 在我们的分析中,我们将忽略这个索引开销,但它必须在最终的算法中考虑。
浮点蝴蝶的C代码如下所示,变量index1和index2是蝴蝶的两个输入的数组偏移量。 数组x[]保存交错数据(real、imag、real、imag等)。
// Fetch two complex samples from memory [5 cycles]
x1r = x[index1];
x1i = x[index1+1];
x2r = x[index2];
x2i = x[index2+1];
// Compute the sum and difference [4 cycles]
sum_r = (x1r + x2r);
sum_i = (x1i + x2i);
diff_r = (x1r - x2r);
diff_i = (x1i - x2i);
// Store sum result to memory [3 cycles]
x[index1] = sum_r;
x[index1+1] = sum_i;
// Fetch complex twiddle factor coefficients [2 cycles]
twiddle_r = *twiddle++;
twiddle_i = *twiddle++;
// Complex multiplication of the difference [6 cycles]
prod_r = diff_r * twiddle_r - diff_i * twiddle_i;
prod_i = diff_r * twiddle_i + diff_i * twiddle_r;
// Store back to memory [3 cycles]
x[index2] = prod_r;
x[index2+1] = prod_i;
代码还显示了各种操作的周期计数,我们看到一只蝴蝶在Cortex-M4上需要23个周期。 更仔细地观察周期计数,我们看到13个周期是由于内存访问,10个周期是由于算术。通过将内存访问分组在一起,花费在内存访问上的总周期数可以减少到11。
即便如此。在Cortex-M4上,radix-2 butterfly的主要功能是内存访问,这对于整个FFT算法来说是正确的。在加速图21.10所示的radix-2 FFT蝴蝶上几乎没有什么可做的。相反,为了提高性能,我们需要考虑更高的基数算法。在radix-2算法中。我们一次处理两个复数值总共有log2N个处理阶段。在每个阶段,我们需要加载N个复值对它们进行操作,然后将它们存储回内存中。在radix-4算法中,我们一次对4个复值进行操作,总共有log N个阶段。这样内存访问就减少了1 / 2。只要中间寄存器没有用完,可以考虑较高的radix。
我们发现在Cortex-M4和radix-8蝴蝶上,最多可以使用浮点数在定点上有效地实现radix-4蝴蝶。radix-4算法被限制为FFT长度,为4的幂:{4, 16, 64,256, 1024, etc.}。而radix-8算法被限制为长度为{8,64,512,4096 etc.}。为了有效地实现任意长度(2的幂),采用了阿米切-基数算法。诀窍是使用尽可能多的radix-8阶段(它们是最高效的),然后根据需要使用单个radix-2或radix-4阶段来达到所需的长度。 下面是各种FFT长度如何分解成蝴蝶阶段:
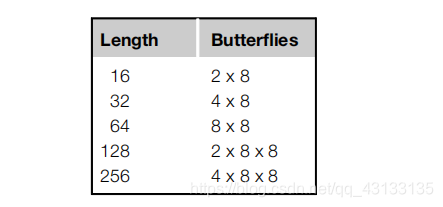
在CMSIS DSP库中,FFT函数使用这种混合基数方法来处理浮点数据类型。 对于定点,必须选择radix-2或radix-4。 一般情况下,选择radix-4定点算法,如果它支持你想要的长度。
许多应用还要求计算FFT逆变换。
通过对正、逆DFT方程的比较,我们发现逆变换具有(1/N)的标度因子,并且旋转因子指数的符号是倒置的。 这导致了两种不同的实现逆FFT的方法:
- 计算前向FFT,但使用一个新的旋转因子表。 新表是使用正指数而不是负指数创建的。 这导致旋转因子简单地被共轭。 除以N。
- 保持与以前相同的旋转因子表,但修改FFT代码,以否定旋转因子表的虚部,同时执行旋转因子乘法。 再除以N。
上述两种方法都有一些低效率。
方法(1) 节省代码空间,但将旋转因子表的大小增加一倍;
方法(2) 重用旋转因子表,但需要更多的代码。
另一种方法是使用数学关系:
I
F
F
T
(
X
)
=
1
N
c
o
n
j
(
F
F
T
(
c
o
n
j
(
X
)
)
IFFT(X)=\frac{1}{N} conj(FFT(conj(X))
IFFT(X)=N1conj(FFT(conj(X))
这需要将数据结合两次。 第一(内)共轭是在开始时完成的,第二共轭(外)可以与N的除法相结合。与方法(2)相比,这种方法的实际开销大致只有内共轭,这是可以接受的。
在定点实现FFT时,了解整个算法中值的缩放和增长是至关重要的。 蝴蝶执行一个和差,它是可能的值在蝴蝶的输出是双倍的输入。
在最坏的情况下,每个阶段的值都是两倍,输出比输入大N倍。 直观地说,如果所有输入值等于1.0,则发生最坏的情况。这表示一个直流(DC)信号,除了bin k= 0包含一个N的值外,得到的FFT全是零。为了避免定点实现中溢出,每个butterfly阶段必须包含一个0.5的比例作为加减法的一部分。这实际上是CMSIS DSP库中定点FFT函数所使用的缩放,最终结果是FFT的输出被缩放1/N。
标准的FFT操作在复杂的数据上,有一些变化用于处理真实数据。通常,n点实FFT是使用复数计算的N/2点FFT加上一些额外的步骤。
FIR滤波器
我们将考虑的第三个标准DSP算法是FIR(有限脉冲响应)滤波器。
FIR滤波器出现在各种音频、视频、控制和数据分析问题中。 与IIR滤波器(如Biquad)相比,FIR滤波器具有几个有用的特性:
- 过滤器本质上是稳定的。这对所有可能的系数都成立
- 线性相位可以通过使系数对称来实现。
- 简单的设计公式。
- 即使在使用定点实现时也表现良好。
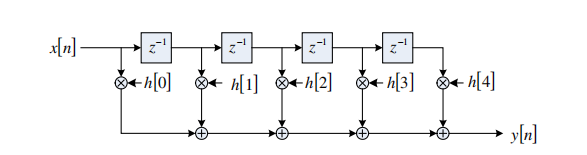
设x[n]时间n时滤波器的输入,y[n]为输出。利用差分方程计算输出:
y
[
n
]
=
∑
k
=
0
N
−
1
x
[
n
−
k
]
h
[
k
]
y[n ]=\sum_{k=0}^{N-1}x[n-k]h[k]
y[n]=∑k=0N−1x[n−k]h[k]
其中h[k]是滤波器系数。 在上述差分方程中,FIR滤波器具有N个系数:
{
h
[
0
]
,
h
[
1
]
,
.
.
.
,
h
[
N
−
1
]
}
\{h[0], h[1],...,h[N-1]\}
{h[0],h[1],...,h[N−1]}
前面的输入样本称为状态变量。滤波器的每个输出都需要N次乘法和N-1次加法。现代DSP可以在大约N个周期内计算一个N点FIR滤波器。
在内存中组织状态数据的最直接的方法是使用FIFO。
如图21.11所示。当样本x[n]到达时,将之前的样本x[n-1]到x[n-N]向下移动一个位置,然后将x[n]写入到缓冲区中。像这样移动数据是非常浪费的,每个输入样本需要N-1个内存读和N-1个内存写。
使用移位寄存器实现FIR过滤器。 在实践中,这很少被使用,因为每当一个新的样本到达时,状态变量必须正确地移动

















 9041
9041

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









