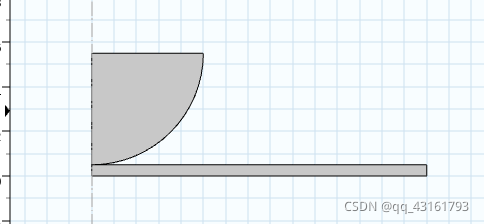
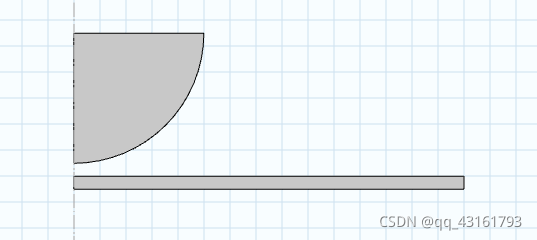
comsol部分不收敛原因总结 1.接触问题中,源比目标的网格细,目标是容易发生变形的对象,所以要求网格更细,h目标小于1/2*h源 找不到所有参数的解, 即使采用最小参数步长也是如此。 即使采用最小阻尼系数也没有收敛。 返回的解不收敛。 没有返回所有参数步长。 修改源和目标的网格符合要求即可。 背景:钢球下移一定距离后提起,在橡胶个钢球表面会发生粘黏效应。 2.只有当源和目标接触时,才能生成仿真结果 当两个物体分开时,造成结果不收敛 造成的可能原因是,第二种情况在移动的过程中不平衡(研究类型为稳态,要求平衡),需要在接触发生前添加弹簧基础


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























 1万+
1万+





