






【圆谐波】
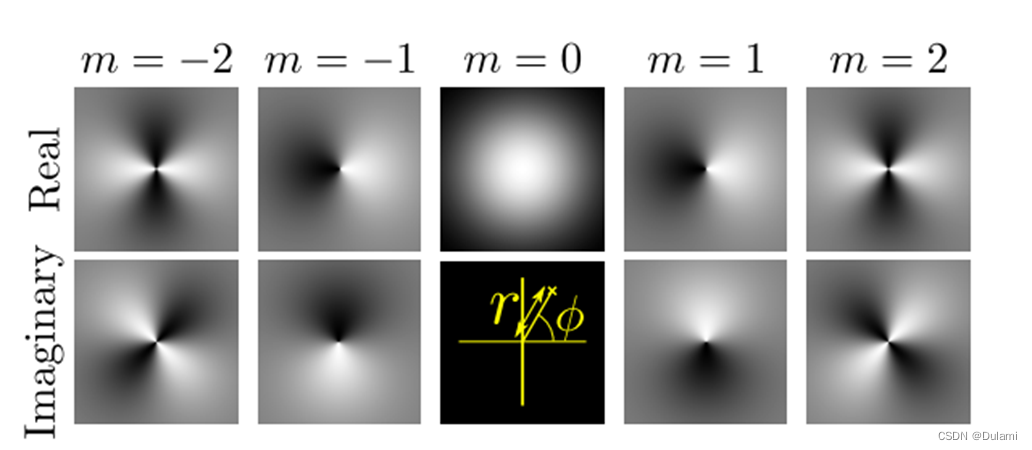
圆谐波可以理解为谐波,其实就是正弦函数,只是两者所处的坐标系是不同的。大家都知道欧拉公式,这里的圆谐波其实就是正弦函数或者余弦函数在极坐标域上的表示。圆谐波具有以下的极坐标表达式形式:
其中和
是极坐标自变量,
表示一个只与极径
相关函数,
是只与极角相关的函数,
是角常量偏置。这里给出复数高斯核的例子:
。这个圆谐波函数的图像如下所示。
【等变表示】
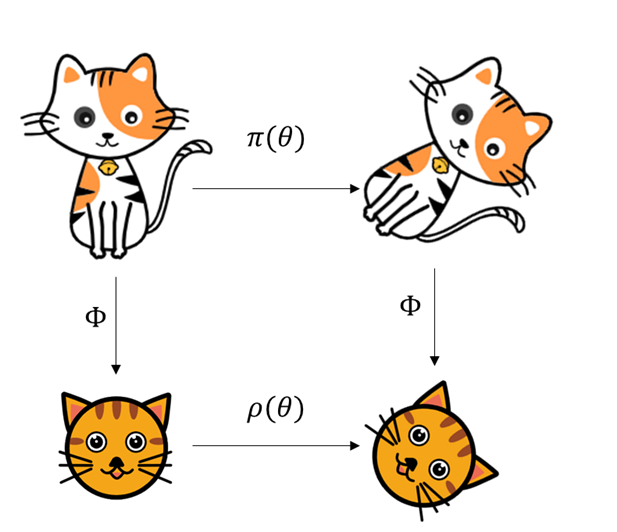
简单而言,等变表示或者等变特征是指,经由特征提取器(通常为某种神经网络,比如本文介绍的谐波网络)提取的特征保留了原始数据的方位和姿态信息。这与不变表示或者不变特征相对应,在不变特征中,则没有保留原始数据的方位和姿态信息。举个例子,如果针对猫的特征训练一个等变神经网络,当输入的猫发生旋转时,经由该网络所提取的特征,应该只发生与输入变换对应的变换。这里没有直接说是与输入相同的变换,是因为输入空间和输出空间可能不一样,相应变换的表现形式也可能不一样。但是输入变换和输出变换之间应该有明确的对应关系。
【谐波网络】
谐波网络的核心在于限制卷积核是圆谐波函数(的线性组合),能够将360度的连续的旋转等变性编码到特征表示中(即能够保持输入图片任意角度的旋转变换到提取的特征中),具体的推导见后,这里需要注意两点,一是这里的滤波器是复数滤波器,等下卷积得到的特征图也是复数特征图;二是滤波器是定义在极坐标下的,后面会提到怎样从极坐标域采样,得到像素滤波器(即常见的滤波器形式)。
在极坐标系上考虑一张图像(特征映射)。当图片关于原点进行旋转,则旋转后的图像记为
,简记为
。下面定义旋转互相关(rotational cross-correlation
)操作为:
对其中的符号进行一些说明:x表示直角坐标,记,其中
,而
对应极坐标中角度的部分,
。这个式子实际上就是互相关在极坐标的写法,它有一个很好的性质:
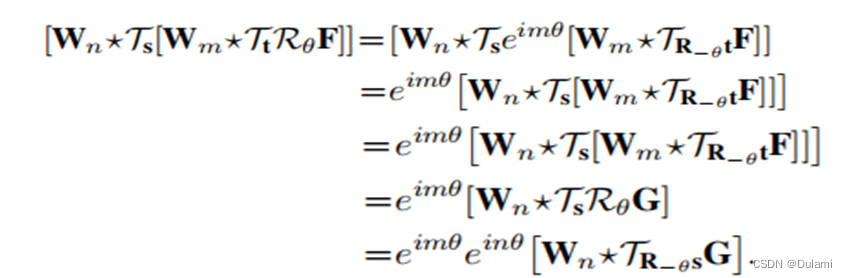
这实际上就说明这个旋转互相关操作对输入变换具有等变性,大家可以对照前文提到的等变表示的概念,也就能理解为什么前面说输出的变换不一定和输入的变换完全一样,但需要有对应关系。下面对这个等变性质进行证明。
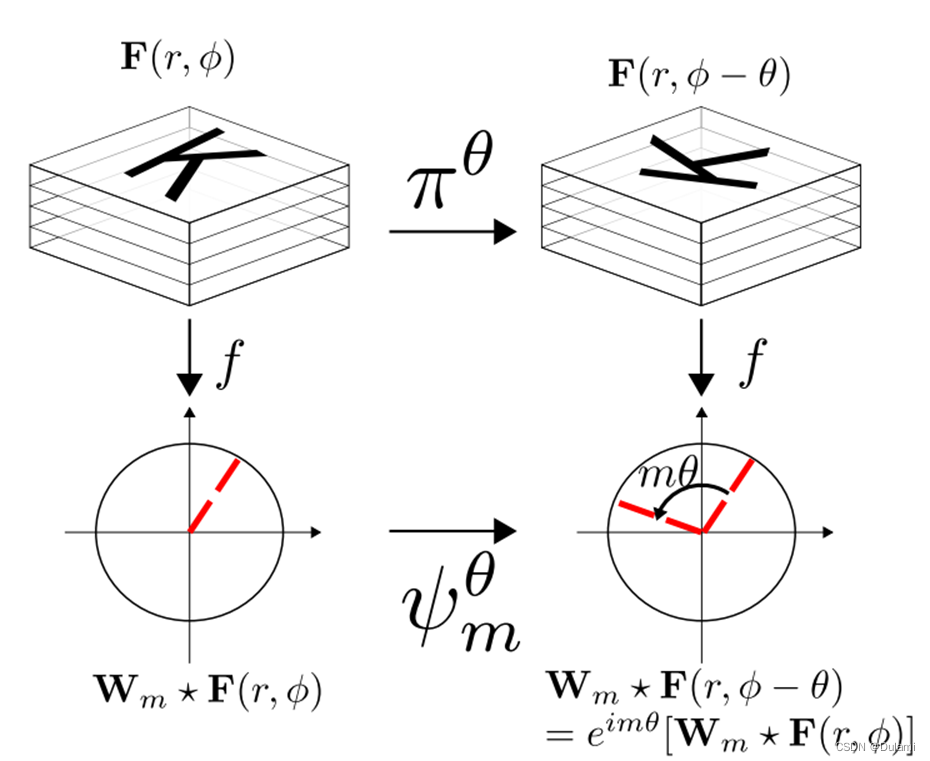
这个证明的含义是,当输入的图片发生旋转后,所提取的特征就会乘上一个与输入图片的旋转角度相关的乘子,这里的m反映了圆谐波滤波器的频率性质,称为滤波器的旋转阶,m通常可取多个值,不同的m会得到不同响应结果。下图显示了这个过程的等变性,由于响应结果与m相关,因此称为m等变映射(m-equivariant feature map):
旋转等变性具有一些比较重要的性质:
- 链式互相关:输入图片的旋转阶(rotation order)是0阶,此后与m阶的滤波器卷积,将会得到旋转阶为m阶的特征图,如果输入特征的旋转阶是m,滤波器的旋转阶是n,则输出特征的旋转阶是𝑚+𝑛。
- 幅值(Magnitude)非线性:作用于幅值的非线性不影响旋转等变性。这个很好理解,因为旋转角度只与复指数有关,而幅值只与复指数的系数有关(即R(r))。
![]()
- 特征图相加:相同阶数的特征图可以相加,得到的新特征图的旋转阶不变。如果将复杂的特征与以不同频率旋转的相位相结合,会导致响应的纠缠。生成的特征图不再对单一旋转阶等变,很难使用。因此需要在每个特征图上强制保持阶数相等。这个条件对网络架构有影响。
![]()
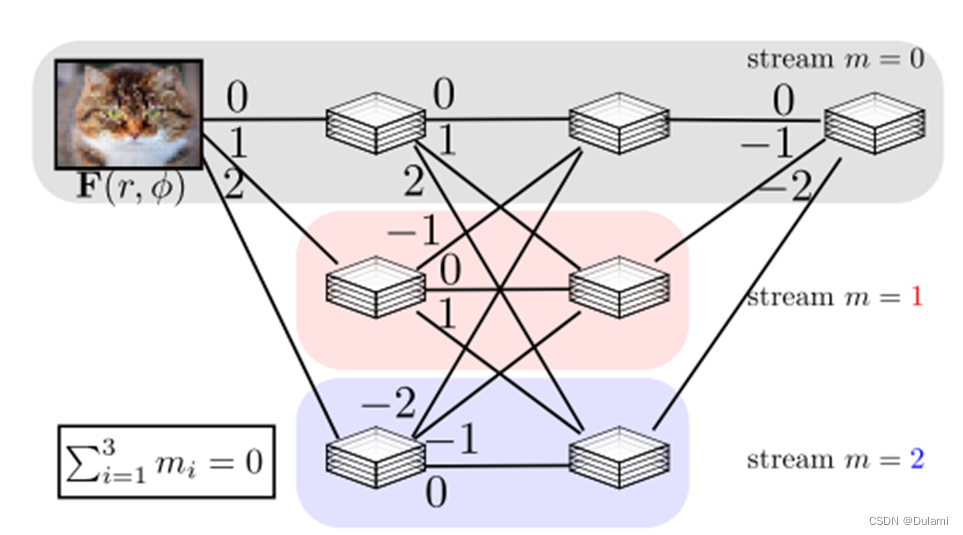
前面提到,在提取特征的过程中会用到多个不同旋转阶的滤波器,相应也会有不同旋转阶的特征映射。为了避免特征图在叠加(或池化)后导致阶数混淆,亦即响应的纠缠(会导致后续的计算变复杂),作者提出将叠加的过程限制在固定的流(stream)上,在固定流上的特征图的旋转阶等于流的旋转阶。假如当前流的旋转阶是M,则以任意路径到达流的终点,都应当满足,其中
表示卷积层数。从不同路径得到的相同旋转阶的特征图可以叠加,叠加后的特征图旋转阶不变。网络最终只用了stream 0(即M = 0)的最终的特征图。
谐波网络的核心就是以圆谐波族函数为滤波器进行卷积(互相关),此外还有一些实现上的细节。一是复数互相关可以由四次实数互相关实现:

二是在池化层使用平均池化,不能使用最大池化,具体原因我没读懂,大家可以参考原文。
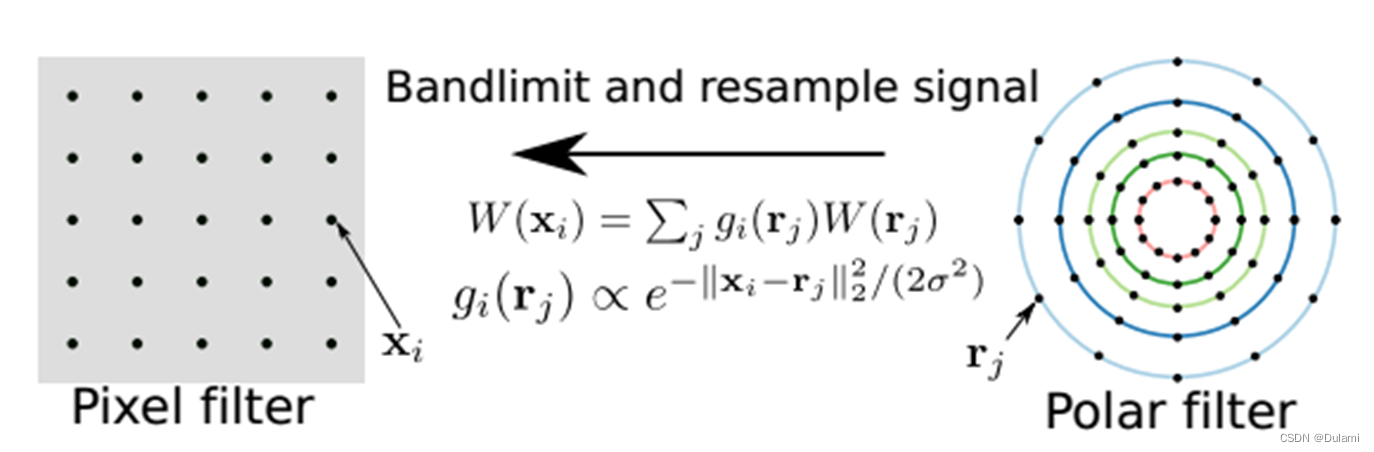
三是我们前面定义的滤波器是定义在极坐标系上的,而实际上的图片却处在直角坐标系,因此需要将极坐标滤波器采样为像素滤波器,原文使用的采样方法为高斯重采样,具体过程为:
- 确定像素滤波器的大小,假设为
,那么这个滤波器就有
个点;
- 极坐标滤波器由若干圈(rings)采样组成,这里的采样是指角度采样,即固定角度间隔采样,由内到外每个圈的半径等差递增,最内圈的半径为0,向外逐层加1,圈数是n / 2,不过需要设置一个最小值,源代码设置为4。极坐标中每个点都有自己的值,从代码来看,每个点的值为:
,这个值其实就是极坐标滤波器的每个点的权重,需要和下面的高斯权重相区分;
- 以像素滤波器的中心为原点,将两个坐标系重合。对于像素滤波器的每个点,计算该点到极坐标滤波器上所有点的高斯权重,将该高斯权重与每个极坐标点的值相乘再相加(加权求和),得到像素滤波器下该点的权重。
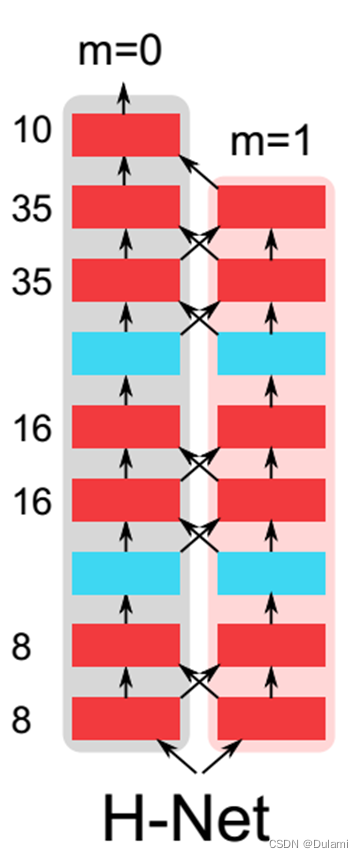
前面讲解了谐波网络的卷积过程,以及一些实现细节。原文示范的网络架构如下图所示,这是两个stream 的网络,其实也可以更多的stream。红色块是卷积层,蓝色块是平均池化。
注:本博文未区分卷积和互相关。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









