7.5.2 弧上权值为任意值的单源点最短路径问题
弧上权值为任意值的单源点最短路径难点
- 图一般的情况:带权有向图G上弧的权值可能为负值。对于带权有向图来说,利用上节给出的迪克斯特拉算法,不一定能得到正确的结果(带负权的回路最短路径是不存在的,可以一直循环下去)。若设源点V0=A,使用迪克斯特拉算法,显然,结果是有问题的。
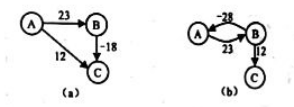
- 为了能够求解弧上带有负权值的单源最短路径问题,贝尔曼(BelLnam)和福特(Ford)提出了从源点逐次经过其他顶点,以缩短到达终点的最短路径长度的方法。该方法有一个限制条件,即要求图中不能有路径长度为负值的回路。例如,图(b)中有一个回路(A,B,A),其路径长度为-5。当路径为(A,B,A,B,…,A,B,C)时,路径长度会越来越小,顶点A到顶点C的最短路径长度可达负无穷大。为了能够用有限条弧构成最短路径,必须把这种情况避开。所以在贝尔曼-福特算法中不考虑这种情况。
- 当图中没有路径长度为负值的回路时,有n个顶点的图中任意两个顶点之间如果存在最短路径,此路径最多有n-1条弧。这是因为如果路径上的弧数超过了n-1条时,必然会重复经过一个顶点,形成路径长度为负值回路。这就违反了先前的限制。下面将以此为依据考虑计算从源点v0到其他顶点u的最短路径的长度dist[u]。
贝尔曼-福特算法实现过程
算法思路
- 在贝尔曼-福特算法中,构造一个最短路径长度的数组序列:dist1 [],dist2 [],…,distn-1 []。其中,dist1 [u]表示从源点v0直接到终点u的最短路径的长度,即dist1 [u]=ars[v0][u];而 dist2 [u]表示从源点v0出发最多经过两条弧(一个中间顶点)到达终点u的最短路径的长度……distk [u]是从源点v0出发最多经过不构成带负长度回路的k条弧(k-1个中间顶点)到达终点u的最短路径的长度。算法的结果就是计算出distn-1 [u]。
- 可以用递推方式计算distn-1 []。设已经求出distk-1 [i],i=0,1,2,…,n-1。此即从源点v0出发最多经过不构成带负长度回路的k-1条到达终点i的最短路径的长度。从图的邻接矩阵中可以找到从任一顶点i直接到达另一顶点u的距离Arc[j][u],计算min{distk-1[i]+arcs[i][u]},用它与distk-1[u]比较,取小者作为distk[u]的值,就可得到从源点v0出发最多经过k条弧(k-1个中间顶点)构成不带负长度回路而到达终点u的最短路径的长度。因此,可得递推公式:
dist1[u]=arcs[v0][u];
distk[u]=min{distk-1[u],distk-1[i]+arcs[i][u]}
- 下面给出计算带权有向图的最短路径长度的贝尔曼-福特算法。算法中为了迭代地求distk[].使用了一个辅助数组distTemp[]来存放一次选代过程中dist[]的中间结果。一次迭代开始时先把dist[]复制到distTemp[],迭代过程中把中间结果记录在distTemp[]中(中间结果不能放在dist[]中),一次迭代结束后再把distTemp[]复制回 dist[].算法结束时dist[]中存放的值等于distn-1[]。

代码实现
#include "AdjListDirNetwork.h"
template<class ElemType,class WeightType> void
ShortestPathBelLnamFord(const AdjListDirNetwork<ElemType,WeightType> &g,int v0,int *path,WeightType *dist)
{
WeightType *distTemp,minVal,infinity=g.GetInfinity();
int v,u,vexNum








 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4724
4724











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









