







目录
前言
小白开始在系统上安装robosense 16驱动,测试环境,特来记录一下。
一、安装雷达驱动
(1)安装依赖项
sudo apt-get install libpcap-dev
(2)创建文件夹并下载 驱动
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/RoboSense-LiDAR/ros_rslidar
(3) 源码属性更改
cd ~/catkin_ws/src/ros_rslidar/rslidar_drvier
chmod 777 cfg/*
cd ~/catkin_ws/src/ros_rslidar/rslidar_pointcloud
chmod 777 cfg/*(4)编译
cd ~/catkin_ws
catkin_make若遇到问题1: Could not find a package configuration file provided by "cv_bridge"
解决方法
sudo apt-get install ros-kinetic-cv-bridge
若遇到问题2:Could not find a package configuration file provided by "pcl_ros"
解决方法
sudo apt-get install ros-kinetic-pcl-ros一般遇到这种依赖包缺失的问题, 解决方案是:将缺的包名中间下划线替换为连字符,使用 roscore 查询ROS版本,然后命令行安装。
sudo apt-get install ros-ros版本-包名前缀-包名后缀
例如:sudo apt-get install ros-kinetic-pcl-ros二、测试
1.设置IP地址
根据雷达说明书上的网址配置,设置本机IP

IP 192.168.1.102
netmask 255.255.255.0
gateway 192.168.1.1设置好之后,连接设备和电脑,选择设置的有线网络。
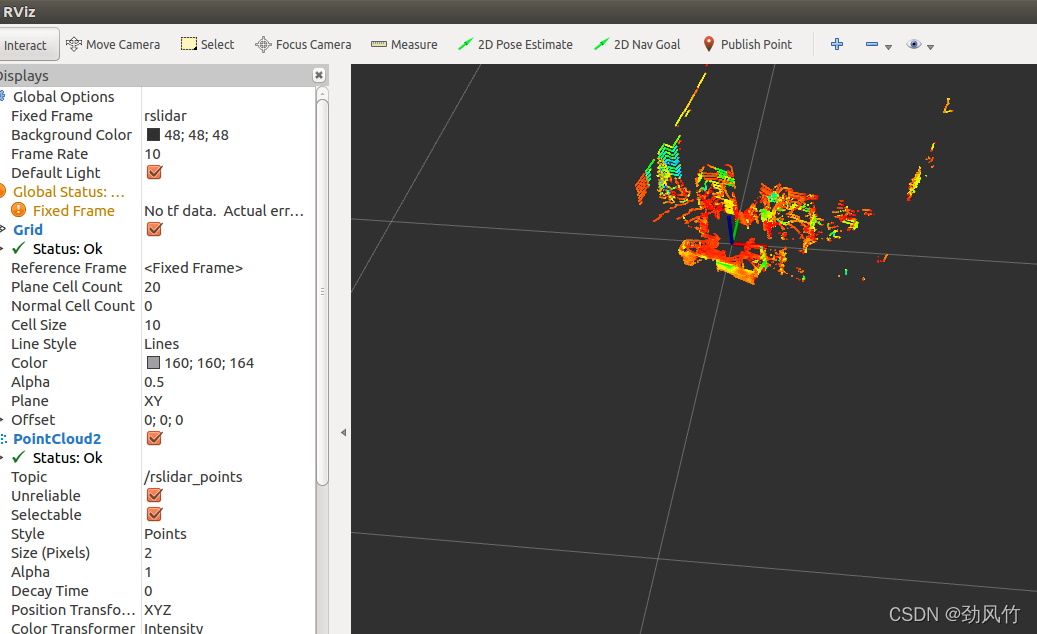
2.运行测试
cd ~/catkin_ws
source devel/setup.bash
roslaunch rslidar_pointcloud rs_lidar_16.launch
离线测试pcap文件
(1)修改rslidar_pointcloud rs_lidar_16.launch中的:
<!--param name="pcap" value="path_to_pcap"/-->
修改结果为
<param name="pcap" value="自己的pcap文件的绝对路径"/>
(2)ctrl+alt+T
cd ~/catkin_ws
source devel/setup.bash
roslaunch rslidar_pointcloud rs_lidar_16.launch
done
总结
小白还有很多不懂的地方,欢迎交流呀。Come on!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









