






 本文详细介绍了在使用StaMPS进行InSAR时序分析时,如何利用Doris、isce2和GAMMA软件进行预处理,尤其是针对GAMMA软件在预处理过程中遇到的问题进行了总结。问题包括mt_perp_gamma调用mt_extract_cands出错、输出文件缺失、索引超出维度错误、setparm时ref_lat和ref_lon乱码以及矩阵超出索引等,并提供了相应的解决方案。此外,还概述了StaMPS的数据处理步骤,如噪声相位估计、PS点选择、相位校正、解缠等关键步骤。
本文详细介绍了在使用StaMPS进行InSAR时序分析时,如何利用Doris、isce2和GAMMA软件进行预处理,尤其是针对GAMMA软件在预处理过程中遇到的问题进行了总结。问题包括mt_perp_gamma调用mt_extract_cands出错、输出文件缺失、索引超出维度错误、setparm时ref_lat和ref_lon乱码以及矩阵超出索引等,并提供了相应的解决方案。此外,还概述了StaMPS的数据处理步骤,如噪声相位估计、PS点选择、相位校正、解缠等关键步骤。
利用StaMPS进行InSAR时序分析过程中,预处理部分主要采用Doris、isce2以及GAMMA软件。由于Doris和isce2的开源性,对StaMPS的适配性较好,少数问题都可以在各大论坛找到解决方案。但在利用GAMMA预处理转Stamps过程中,存在较多的问题,对这些问题进行了简单的总结。以下以SBAS-InSAR数据处理流程为例(不过博主依旧建议有GAMMA的条件下,直接利用GAMMA进行时序分析)。
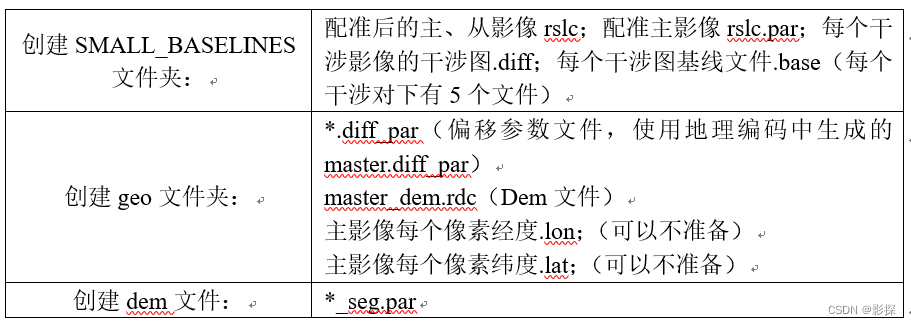
1.数据准备:
2.mt_perp_gamma:
mt_perp_gamma: <主影像日期> <文件夹路径> <幅度阈值(0.6)> <距离向块数> <方位向块数> <方位向块重叠像素数> <距离向块重叠像素数>
输出数据:PATCH文件夹(分几个块,产生几个文件)
当前路径文件:
width.txt:主影像行数
len.txt:主影像列数
bperp.1.in:基线分布
day.1.in:辅影像日期
master_day.1.in:主影像日期
ifgday.1.in:干涉对日期
heading.1.in:文件头信息
lambda.1.in:主影像雷达波长
look_angele.1.in:视角文件
calamp.out:幅度定标信息
demparm.in:DEM参数
patch.list
PATCH文件:
mean_amp.flt:平均幅度图
patch.in和patch_noover.in:分块范围
pscands.1.ij和pscands.1.da:PS候选点
pscands.1.ll:每个候选点的经纬度信息
pscands.1.hgt:每个候选点的高程信息
pscands.1.ph:每个候选点的相位信息
问题1:mt_prep_gamma调用mt_extract_cands出错
运行到Selsbc_patch打不开.rslc文件;注意文件路径需要绝对路径。
问题2:输出文件缺少一些必须文件
没有运行pt2geo,修改mt_prep_gamma代码,注释掉233行的end,注释掉247行的 type pt2geo >& dev/null
3.Stamps设置
各个参数及含义参考Stamps使用手册
4.数据处理
4.1加载数据
stamps(1,1):调用sb_load_initial.m,将小基线处理所需各种文件加载进matlab工作空间,输出文件:
bp1.mat:干涉图中每个候选点的基线分布、da1.mat:每个候选点的幅度离差、hg1.mat:每个候选点的高度值、la1.mat:每个候选点的视角、ph1.mat:每个候选点的相位、ps1.mat:每个候选点的点位、行列号、经纬度等信息
问题1:索引超出维度,sb_load_initial_gamma中146行出错
将sb_load_initial_gamma.m中的第141行、142行参考sb_load_initial.m修改
问题2:setparm时ref_lat和ref_lon均为乱码
将sb_load_initial_gamma.m中的第132行float改为float64
问题3:矩阵过大超出索引,原因:hgt和lonlat里存在0值,需要删除0值,修改sb_load_initial_gamma和ps_load_initial_gamma代码,大致思路为:对生成的相关文件读取后进行排序,删除0值后保存即可。
4.2估计噪声相位
stamps(2,2):调用ps_est_gamma_quick.m,迭代计算每个干涉图中每个候选点的噪声相位,计算每个候选点的γ值。
输出文件:pm1.mat
4.3选择PS点
stamps(3,3):调用ps_select.m,基于计算出的每个候选点的γ值,同时考虑幅度离差选取高相干像元。
输出文件:select1.mat
4.4剔除PS点
stamps(4,4):调用ps_weed.m,去除那些只在一些干涉图中相位稳定的高相干点及其受临近高相干点影响而表示为高相干点特征的像元。
4.5相位校正
stamps(5,5):调用ps_correct_phase.m和ps_calc_ifg_std.m,对选取的高相干像元的缠绕相位去除spatiall-uncorrelated look angel (DEM) error。
解缠完成以后可以查看各个像素点的相位:ps_plot(‘w’)
主影像相位都为0,默认点的大小是120m,修改绘制PS点的大小:
setparm(‘plot_scatterer_size’,30)
4.6相位解缠
stamps(6,6):调用ps_unwrap.m,sb_invert_uw.m,对选取的高相干像元的缠绕相位进行相位解缠。
4.7评估空间相关的视角误差
stamps(7,7):调用ps_calc_scla.m、ps_smooth_scla.m和ps_scn_filt.m,估计小基线干涉对和PS处理干涉图中的spatially-correlated look angle error,同时估计出主影像大气影响相位和轨道误差相位(AOE)。
4.8大气滤波
stamps(8,8):调用ps_calc_scla.m、ps_smooth_scla.m和ps_scn_filt.m,估计小基线干涉对和PS处理干涉图中的spatially-correlated look angle error,同时估计出主影像大气影响相位和轨道误差相位(AOE)。可以分离大气和变形信号,使用步骤8。
需要triangle软件
5.plot绘制

















 4922
4922

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









