







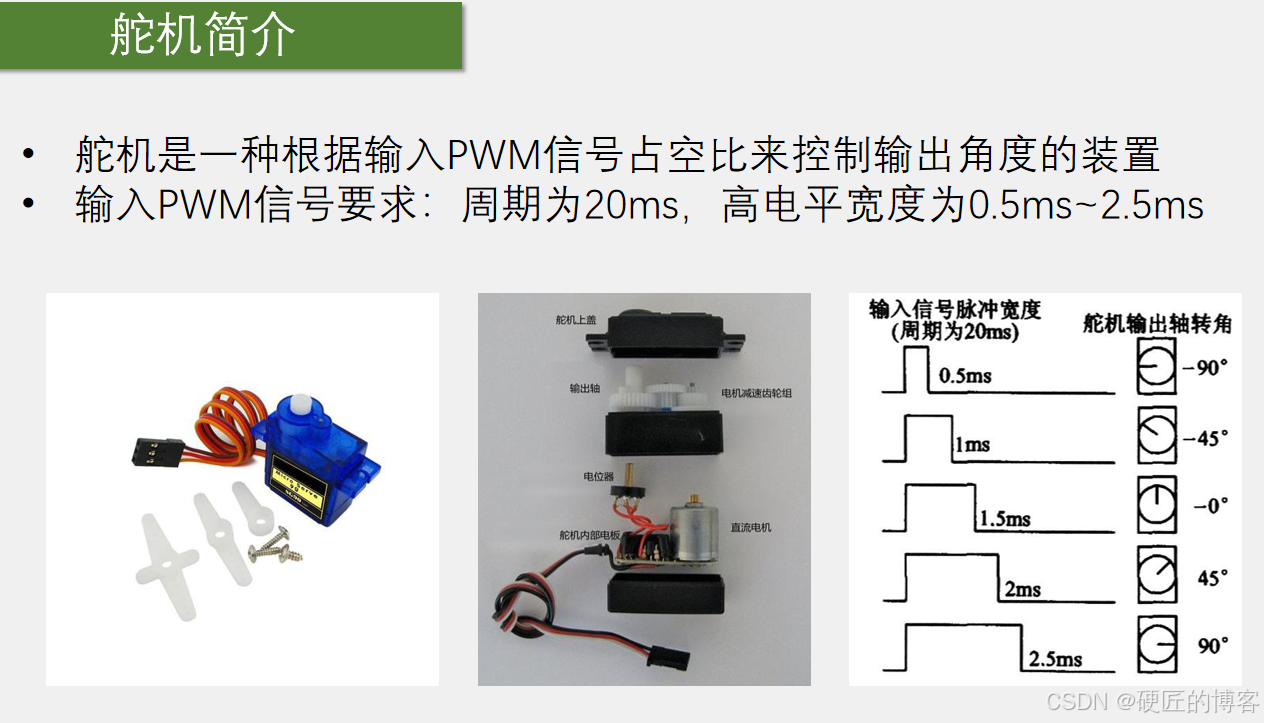
SG90:两根电源线,一根信号线,PWM就是输入到这个信号线,来控制舵机的。
结构:舵机上盖、输出轴、电机减速齿轮组、电位器、舵机控制板、直流电机。
舵机的工作方式:白色的输出轴会固定在一个指定的角度不动,固定在哪个位置由信号线的PWM信号来决定。
舵机并不是一种单独的电机,里面还有一个控制电路板,是一个电机的控制系统,大概的执行逻辑:PWM信号输入到控制板,给控制板一个指定的目标角度,然后电位器检测输出轴的当前角度,如果大于目标角度,电机就会反转,小于目标角度,电机就会正转,最终输出轴固定在指定角度。
用户只需知道:输入一个PWM波形,输出轴就固定在一个角度就行了。
高电平宽度为0.5ms-2.5ms,就是占空比的范围,这是一个180度的舵机,输出轴的角度时-90度到+90度,或者规定为0-180度也可以。
输入信号脉冲宽度时,周期为20ms,中间脉宽的与角度的对应关系是线性分配的,按比例来。实际应用中,比如机器人,机器臂,可以用舵机来控制关节,遥控车,遥控船可以用舵机来控制方向,还有一些其他的机械结构,可以考虑用舵机。这里的PWM波,其实可以当成一个通信协议来使用,和之前说的用PWM等效一个模拟输出,关系不大。把PWM当成一个通信协议,也是一个比较常见的应用,因为很多控制器都有PWM输出的功能,而且PWM只需要一根信号线就可以了
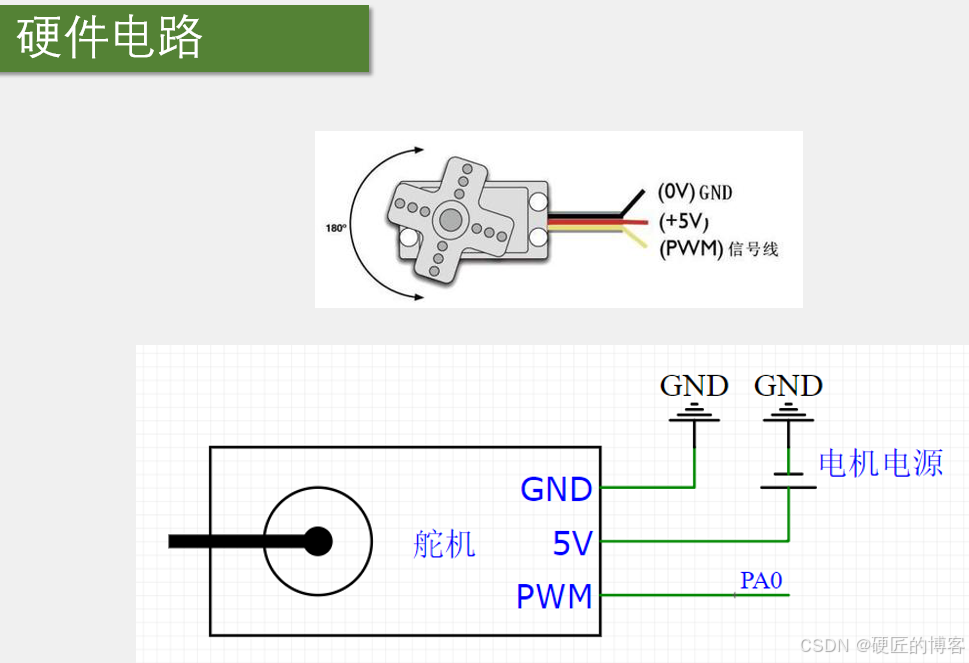
+5V是电机的驱动电源(必须是一个大功率的输出设备),如果能像这样单独供电,那是很好的。如果不能,也要注意电源的功率是不是能达标,如果单独供电的话,供电的负极要和STM32共地,然后正极接在5V供电引脚上,因为舵机内部有驱动电路,所以单片机引脚比如PA0就接到PWM脚,这个PWM只是一个通信线,是不需要大功率的




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











