









 该博客详细介绍了如何设计一个电动机控制系统,包括四台三相异步电动机的点动运行、逆序延时启动、根据包裹位置自动启停、无包裹定时停止以及紧急停止等功能。通过电气原理图和控制方案描述,阐述了每个环节的工作原理和解决的技术问题。
该博客详细介绍了如何设计一个电动机控制系统,包括四台三相异步电动机的点动运行、逆序延时启动、根据包裹位置自动启停、无包裹定时停止以及紧急停止等功能。通过电气原理图和控制方案描述,阐述了每个环节的工作原理和解决的技术问题。
传送带电气控制线路
一、设计概述
将四台传送带理想化为四台三相异步交流电动机,即接收传送由三相异步电动机拖动实现。
实现传送带接收传送目标:
1、当分别按下四个复合按钮(电气原理图中分别为SB1、SB2、SB3、SB4,以下电气原理图均简称为图)时,四个三相异步电动机均可点动运行。
2、当按下“传动启动”按钮(图中SB0)时,四台三相异步电动机能够实现从M1到M4逆序启动。
3、当包裹传送到传送带末端时,触发行程开关(图中BG1)使传送带全部停止运行,等包裹被取走后,四台异步电动机同时启动,继续运行。
4、若一分钟(仿真时用5秒钟替代)之内没有包裹运送到传送带末端,四台异步电动机全部停止运行。
5、如遇紧急事故,按下停止按钮(图中SB5),四台异步电动机同时停止运行。
二、设计方案
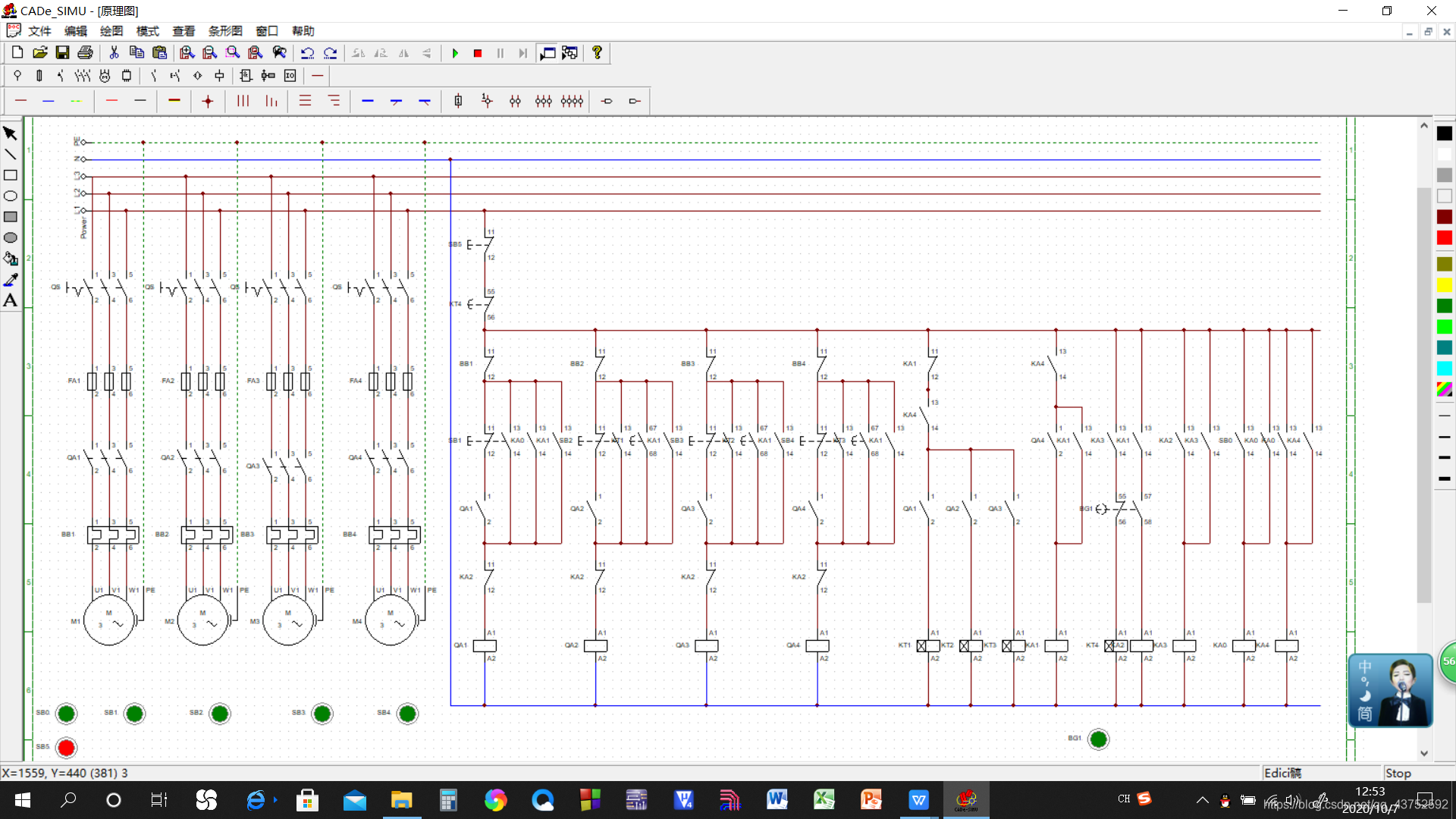
(一)电气原理图
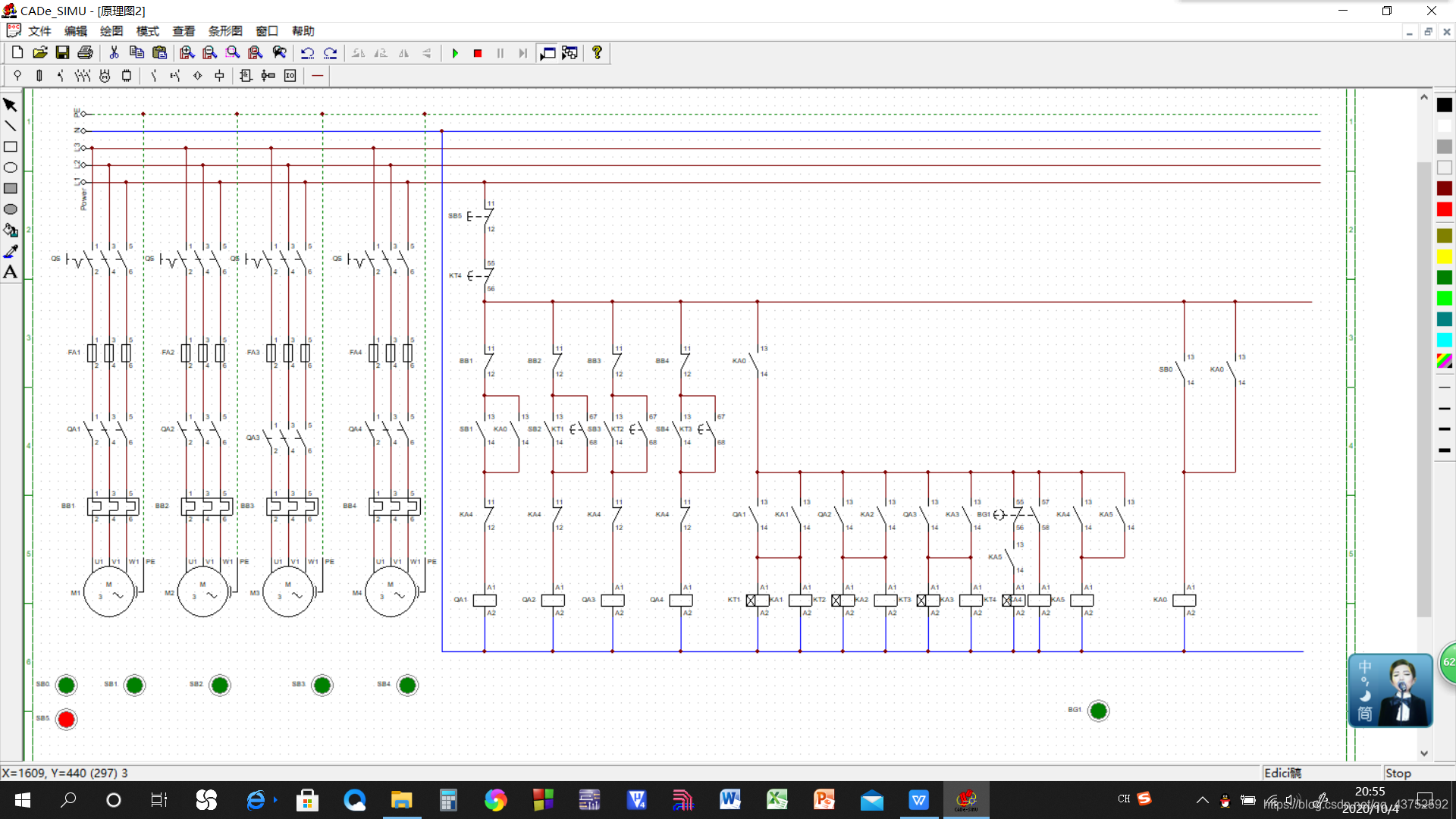
图一 电气原理图
(二)控制方案描述
1、点动运行
按下常开按钮SB1,辅助电路接触器QA1上电,主电路接触器QA1触点闭合,三相异步电动机M1运行。
同理,按下常开按钮SB2、SB3、SB4可使三相异步电动机实现逆序点动运行。
2、四台三相异步电动机逆序延时启动
按下常开按钮SB0,中继器KA0上电,中继器KA0触点闭合,中继器KA0实现自锁,此时,接触器QA1上电,三相异步电动机(下文简称电动机)M1开始逆序运行,接触器QA1触点闭合,时间继电器KT1和中继器KA1同时上电,中继器KA1触点闭合,延时2秒,时间继电器KT1触点闭合,接触器QA2上电,电动机M2开始逆序运行,接触器QA2触点闭合,时间继电器KT2和中继器KA2同时上电,中继器KA2触点闭合,延时2秒,时间继电器KT2触点闭合,接触器QA3上电,电动机M3开始逆序运行,接触器QA3触点闭合,时间继电器KT3和中继器KA3同时上电,中继器KA3触点闭合,延时2秒,时间继电器触点KT3闭合,接触器QA4上电,电动机M4开始逆序运行,此时实现四台三相异步电动机逆序延时启动运行。
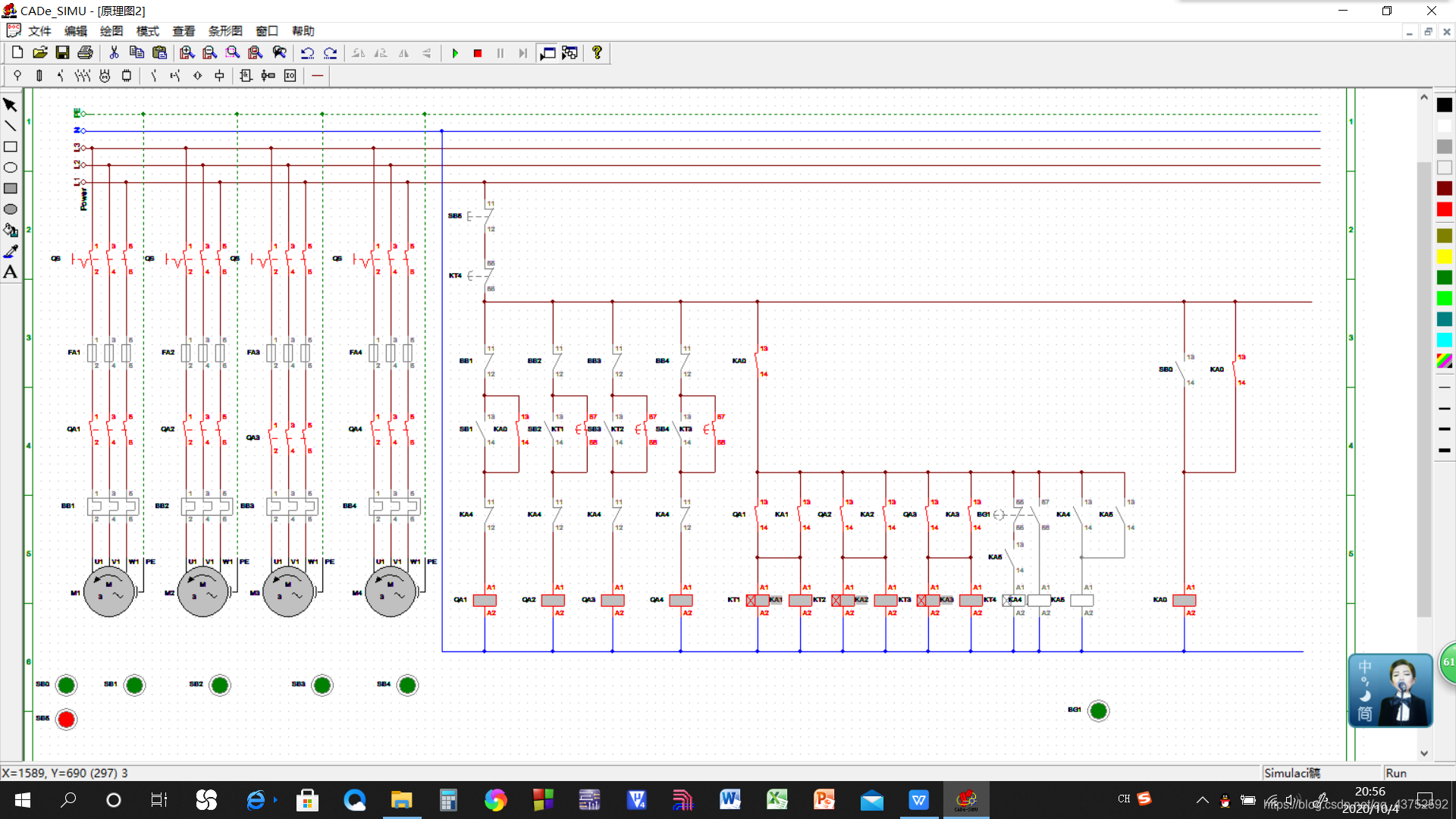
图二 逆序启动运行后的的仿真
3、包裹到末端,电动机均停止及取走包裹后,电动机均重新开始运行
手动按下连接行程开关的按钮(BG1),模拟当包裹到达末端时挤压行程开关的情况。行程开关BG1的常开触点闭合,中继器KA4上电,中继器KA4常开触点闭合,常闭触点打开,电动机全部停止工作。
同时,中继器KA5上电,中继器KA5触点闭合,中继器KA5处于自锁状态,等到包裹被机械臂取走后,行程开关BG1恢复,即行程开关BG1常开触点断开,常闭触点闭合,中继器KA4失电,中继器常闭触点KA4恢复闭合状态,四台电动机同时重新启动运行。
中间继电器及其触点KA1、KA2、KA3是为了保证四台电动机能够同时启动。
4、一分钟(5秒)内没有包裹传送到末端,电动机停止运行
行程开关BG1恢复后,由于中继器KA5触点闭合,时间继电器KT4上电,延时一分钟(5秒),若期间有货物送达传送带末端,机械臂来取货物,同问题3;若期间无货物送达,则四台电动机全部停止。
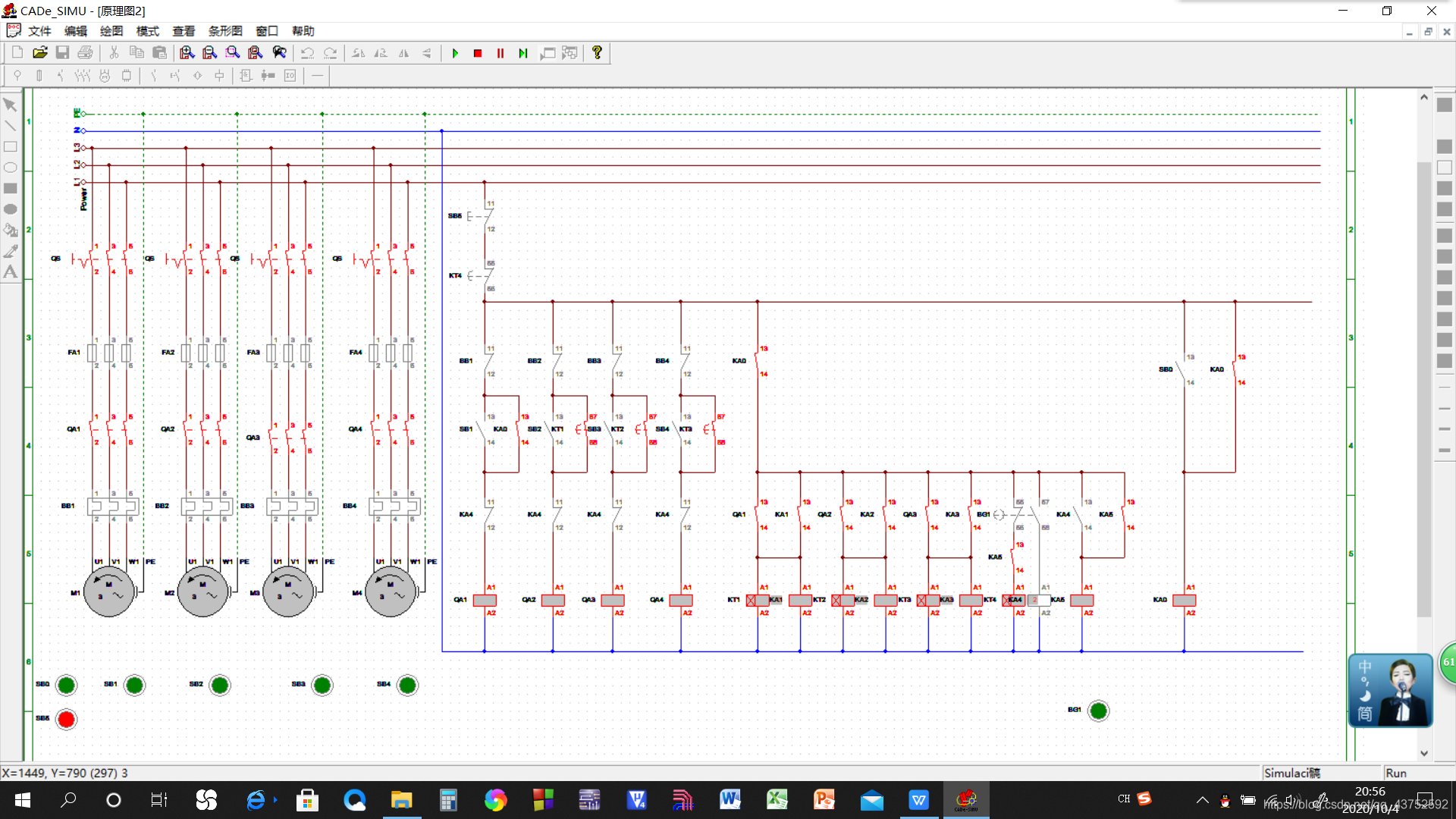
图三 取完货后等待过程(还剩2秒)
5、停止运行
如果遇到紧急情况需要立即关停全部电机,按下常闭按钮SB5,即可实现四台电动机全部停止运行。
三、总结
(一)设计、仿真过程中遇到的问题及解决办法
1、软件中没有找到常开按钮
解决办法:由于在CADe_SIMU软件驱动器按钮一栏中没有找到常开按钮,我用一个按下按钮(圆形)和一个NO接点代替常开按钮。
2、软件中没有找到行程开关
解决办法:由于在CADe_SIMU软件开关一栏中没有找到行程开关,我用一个按下按钮(圆形)和一个NO+NC联系超时的连接断开接点代替常开按钮。
3、设计过程中,导线如果连接不当,软件无法自动识别,导致电路断开,无法正常运行
解决办法:查找未接通的线路,重新连线。(十分耗时)
4、点动时,使用复合按钮,使接触器QA1上电,松开时,接触器触点QA1无法正常断开
解决办法:在软件中似乎无法解决。因为复合按钮在断开时应该是先断开常开触点,再闭合常闭触点,期间有一个微妙的时间差,不过软件中无法实现,只能同时开合,导致仿真失败。
附:方案二
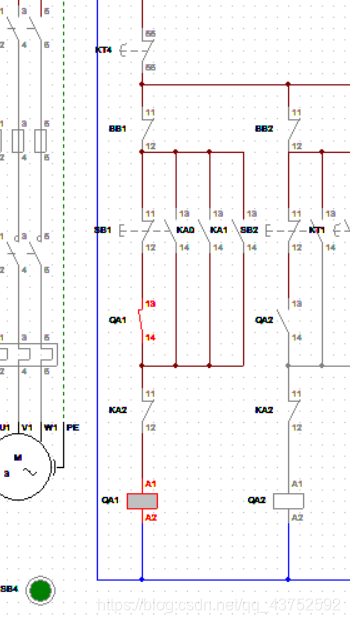
(一)电气原理图
(二)控制方案描述
1、点动运行
按下复合按钮SB1,辅助电路复合按钮SB1常闭端子(先)断开,同时常开端子闭合,接触器QA1上电,接触器QA1触点闭合,同时主电路接触器QA1触点闭合,三相异步电动机M1开始逆序运行;松开复合按钮SB1,辅助电路复合按钮SB1常开端子(先)断开,此时接触器QA1失电,接触器QA1触点断开,SB1常开端子断开的同时常闭端子闭合,三相异步电动机M1停止运行。
同理,按下复合按钮SB2、SB3、SB4可使三相异步电动机实现逆序点动运行。
错误点:即上述遇到的问题4,可能现实中操作能够实现。
2、四台三相异步电动机逆序延时启动
按下常开按钮SB0,中继器KA0上电,中继器触点KA0闭合,中继器KA4上电,中继器触点KA4闭合,此时按钮SB0已断开,中继器KA0、KA4实现自锁。
接触器QA1上电,三相异步电动机(下文简称电动机)M1逆序运行,接触器QA1触点闭合,时间继电器KT1上电,延时2秒,时间继电器KT1触点闭合,接触器QA2上电,电动机M2逆序运行,接触器QA2触点闭合,时间继电器KT2上电,延时2秒,时间继电器KT2触点闭合,接触器QA3上电,电动机M3逆序运行,接触器QA3触点闭合,时间继电器KT3上电,延时2秒,时间继电器KT3触点闭合,接触器QA4上电,电动机M4逆序运行。
3、包裹到末端,电动机均停止及取走包裹后,电动机均重新开始运行
接触器QA4上电,接触器QA4触点闭合,中继器KA1上电,中继器KA1触点闭合,KA1实现自锁。此时接触器QA1、QA2、QA3、QA4均上电,四个接触器实现互锁。货物到达传送带末端时挤压行程开关BG1,其常开触点闭合,常闭触点断开,中继器KA2上电,中继器KA2常开触点闭合,中继器KA3上电,中继器KA3触点闭合,接触器KA3实现自锁。接触器KA2常闭触点断开,四台电动机均停止运行。当机械臂将货物取走时,行程开关BG1常开触点断开,常闭触点闭合,时间继电器KT4上电,接触器KA2失电,接触器KA2常闭触点闭合,四台电动机同时重新启动运行。
错误点:当按下行程开关时,接触器KA1自动失电,问题仍未解决,应该是软件逻辑问题。
4、一分钟(5秒)内没有包裹传送到末端,电动机停止运行
由于方案二的步骤三没有实现,导致方案二的步骤四也无法实现。
5、停止运行
如果遇到紧急情况需要立即关停全部电机,按下常闭按钮SB5,即可实现四台电动机全部停止运行。
(三)声明
- 本文章及图片版权归属作者无意注意-所有。未经允许,不得转载。
- 本文章仅供学习交流,不可用作商用。
- 本文章内容仅为作者本人观点,如有错误,欢迎批评指正。
- 本文章的修改权、更新权及最终解释权归作者本人所有。
- 以上声明的解释权归作者无意注意-所有。

















 1376
1376

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









