






 使用torchvision的create_feature_extractor获取ResNet18不同层特征图,展示获取和可视化过程,以及模型层名获取方法。
使用torchvision的create_feature_extractor获取ResNet18不同层特征图,展示获取和可视化过程,以及模型层名获取方法。
通过torchvision提供的create_feature_extractor函数,我们可以根据层的名称轻松获取特征图。
文章所选用的测试图像如下:

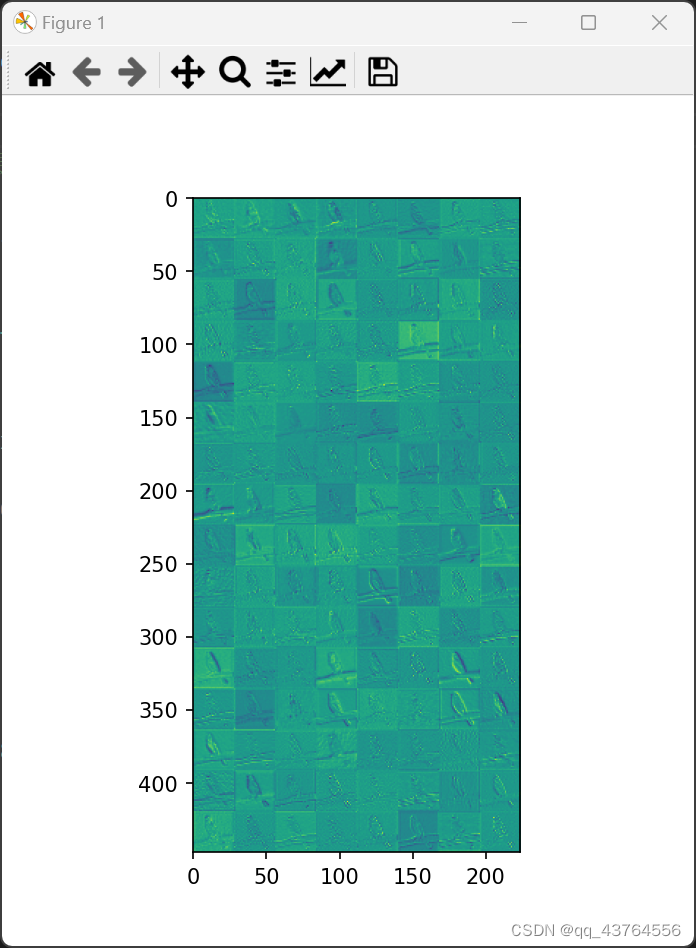
输出结果 :
以下为全部代码:
import torch
import torchvision
import torchvision.transforms as transforms
from PIL import Image
from torchvision.models.feature_extraction import create_feature_extractor
import einops
import matplotlib.pyplot as plt
def read_image_as_tensor(name: str):
preprocess = transforms.Compose([
transforms.ToTensor(), # 将图像转换为张量
transforms.Resize((224, 224), antialias=True)
])
return preprocess(Image.open(name)).unsqueeze(0)
features = ['layer2.0.conv1', "layer3.0.conv1"]
model = torchvision.models.resnet18(
weights=torchvision.models.ResNet18_Weights.DEFAULT)
feature_extractor = create_feature_extractor(model, return_nodes=features)
# 定义输入
x = read_image_as_tensor('n0153282900000010.jpg')
out = feature_extractor(x)
print(out['layer2.0.conv1'].shape)
print(out['layer3.0.conv1'].shape)
f1 = out['layer3.0.conv1'] # 特征图
# 调整以方便可视化
f1 = torch.reshape(f1, (16, 16, 14, 14))
f1 = einops.rearrange(f1, "H W h w -> (H h)(W w)")
plt.imshow(f1.detach().numpy())
plt.show()那么如何知道模型中不同层的名称呢?一种方法是直接print打印模型,另一种方法是使用get_graph_node_names函数。
import torchvision
import torch
from torchvision.models.feature_extraction import get_graph_node_names
model = torchvision.models.resnet18(
weights=torchvision.models.ResNet18_Weights.DEFAULT)
# 方法1
print(model)
# 方法2
nodes, _ = get_graph_node_names(model)
print(nodes)这两种结果的输出分别如下:
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=512, out_features=1000, bias=True)
)['x', 'conv1', 'bn1', 'relu', 'maxpool', 'layer1.0.conv1', 'layer1.0.bn1', 'layer1.0.relu', 'layer1.0.conv2', 'layer1.0.bn2', 'layer1.0.add', 'layer1.0.relu_1', 'layer1.1.conv1', 'layer1.1.bn1', 'layer1.1.relu', 'layer1.1.conv2', 'layer1.1.bn2', 'layer1.1.add', 'layer1.1.relu_1', 'layer2.0.conv1', 'layer2.0.bn1', 'layer2.0.relu', 'layer2.0.conv2', 'layer2.0.bn2', 'layer2.0.downsample.0', 'layer2.0.downsample.1', 'layer2.0.add', 'layer2.0.relu_1', 'layer2.1.conv1', 'layer2.1.bn1', 'layer2.1.relu', 'layer2.1.conv2', 'layer2.1.bn2', 'layer2.1.add', 'layer2.1.relu_1', 'layer3.0.conv1', 'layer3.0.bn1', 'layer3.0.relu', 'layer3.0.conv2', 'layer3.0.bn2', 'layer3.0.downsample.0', 'layer3.0.downsample.1', 'layer3.0.add', 'layer3.0.relu_1', 'layer3.1.conv1', 'layer3.1.bn1', 'layer3.1.relu', 'layer3.1.conv2', 'layer3.1.bn2', 'layer3.1.add', 'layer3.1.relu_1', 'layer4.0.conv1', 'layer4.0.bn1', 'layer4.0.relu', 'layer4.0.conv2', 'layer4.0.bn2', 'layer4.0.downsample.0', 'layer4.0.downsample.1', 'layer4.0.add', 'layer4.0.relu_1', 'layer4.1.conv1', 'layer4.1.bn1', 'layer4.1.relu', 'layer4.1.conv2', 'layer4.1.bn2', 'layer4.1.add', 'layer4.1.relu_1', 'avgpool', 'flatten', 'fc']
















 1369
1369

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









