






目录
一、前言
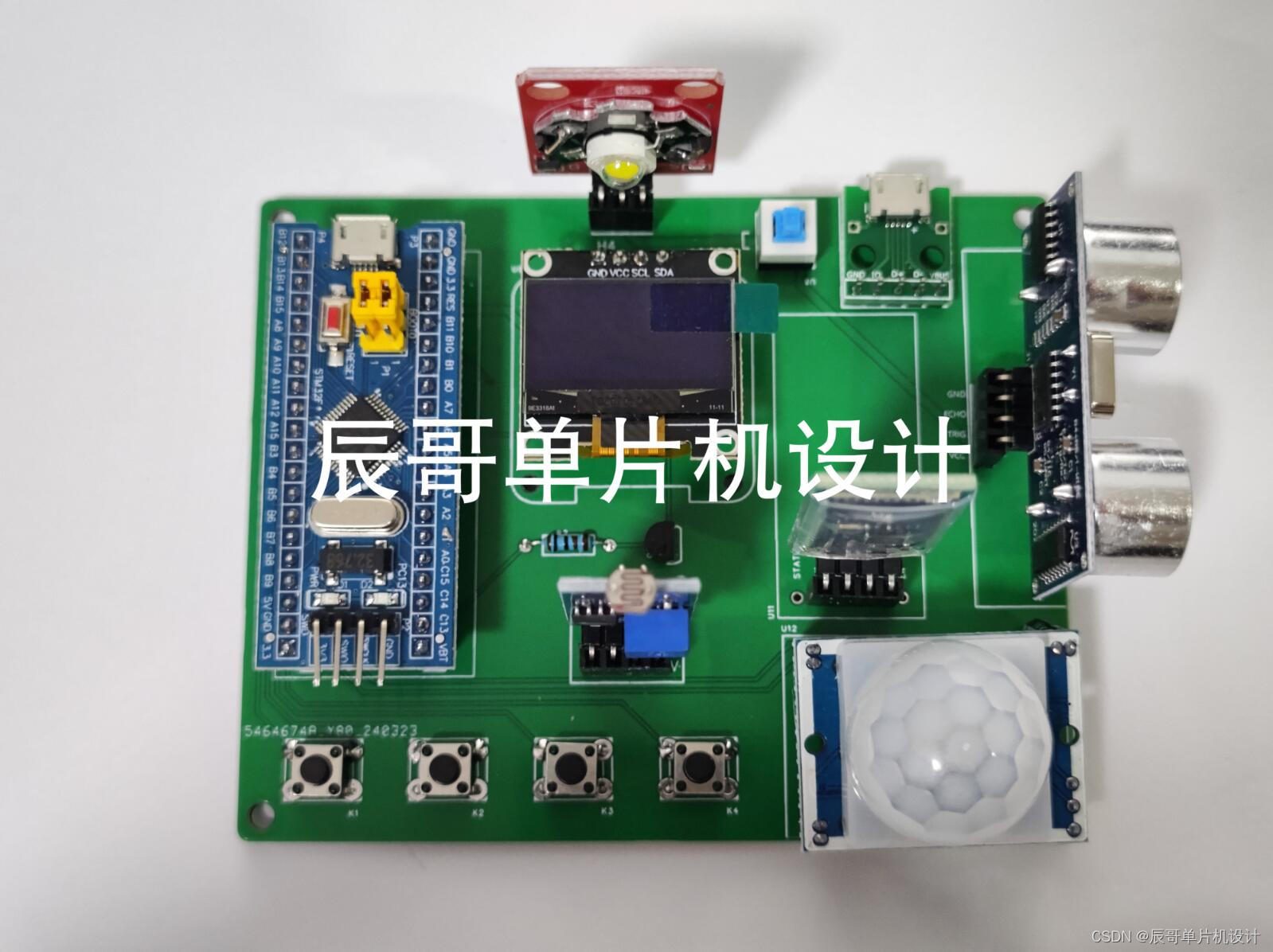
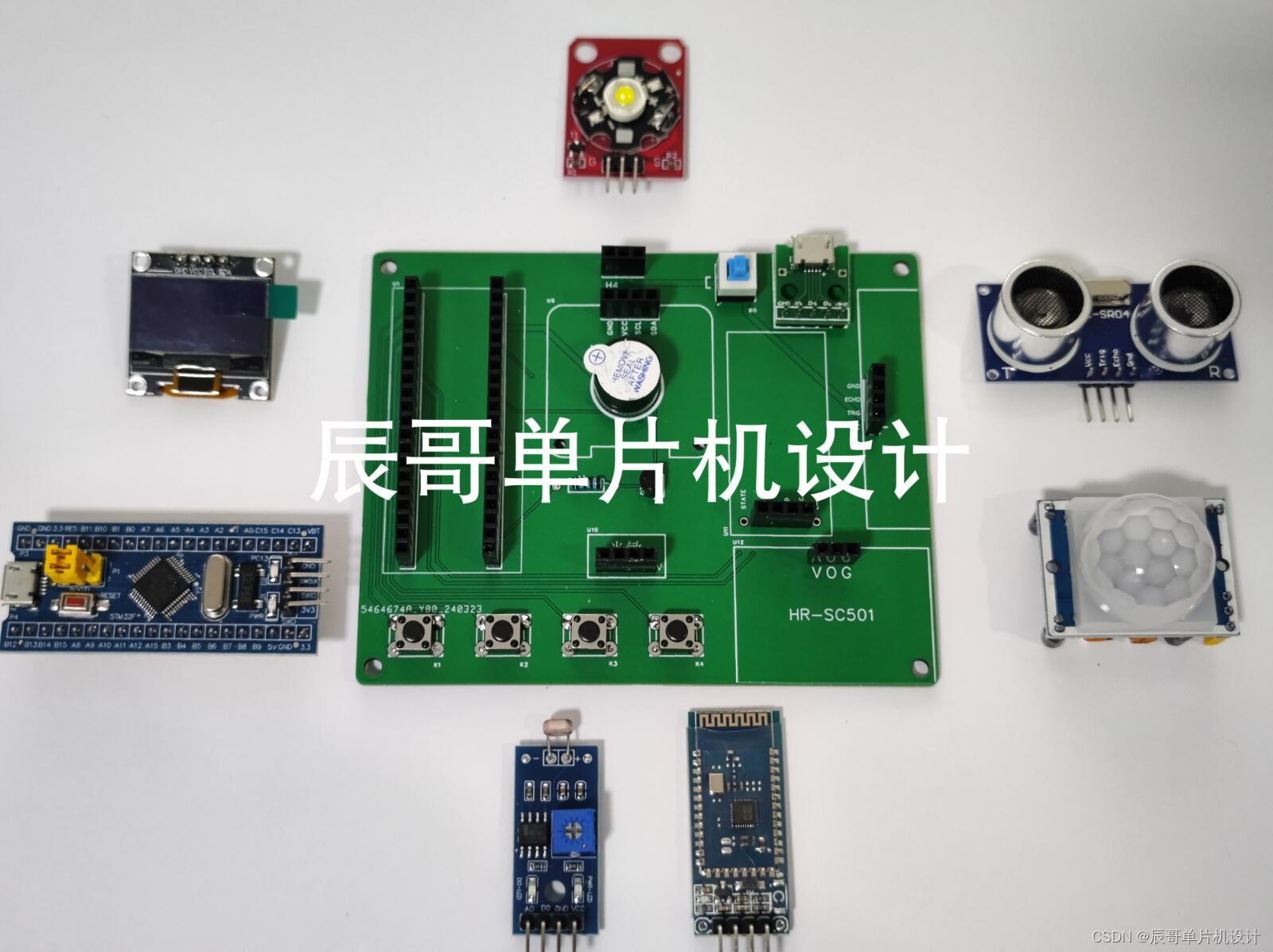
项目成品图片:
哔哩哔哩视频链接:
(资料分享见文末)
二、项目简介
1.功能详解
基于STM32智能台灯系统。
功能如下:
- 亮度控制:按键控制照明灯的亮度(5挡亮度)
- 计时功能:按键启动计时,累计台灯运行时间(作息时间)
- OLED显示:显示当前模式、环境光强、超声波距离
- 控制模式:通过按键控制照明灯为手动模式/自动模式
- 蓝牙APP控制:通过蓝牙APP控制照明灯模式选取、亮度调节、计时等功能
- 智能调光:自动模式下根据外界光线变化,LED照明灯自动调节亮度
- 人体姿态提醒:超声波距离近于5cm触发蜂鸣器报警,提醒纠正人体姿态
2.主要器件
- STM32F103C8T6最小系统板
- OLED显示屏(4针I2C协议)
- 光敏传感器
- 大功率LED照明灯模块
- HC-SR04超声波传感器
- HC-SR501人体红外传感器
- 蓝牙模块(BT04-A)
- 蜂鸣器
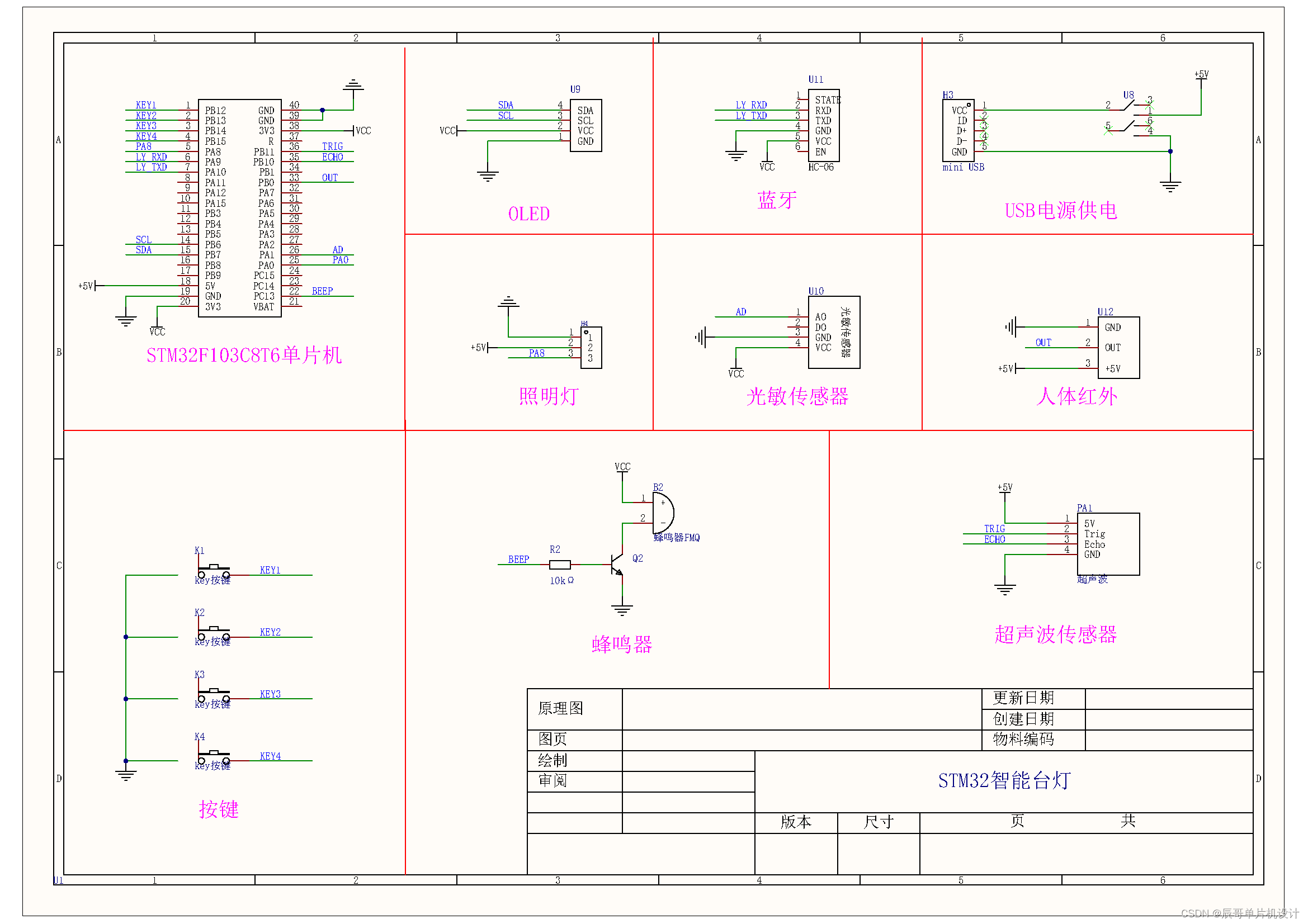
三、原理图设计
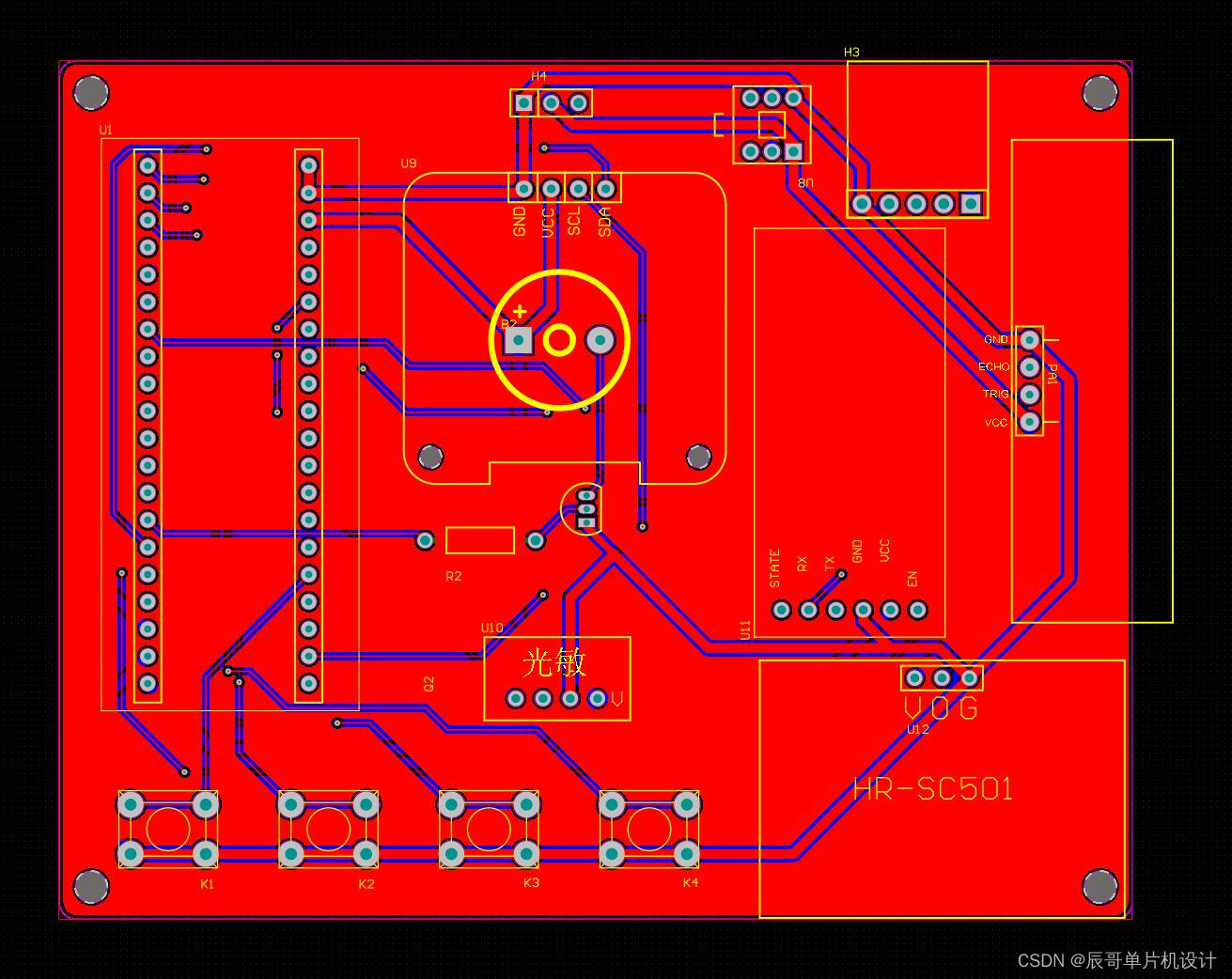
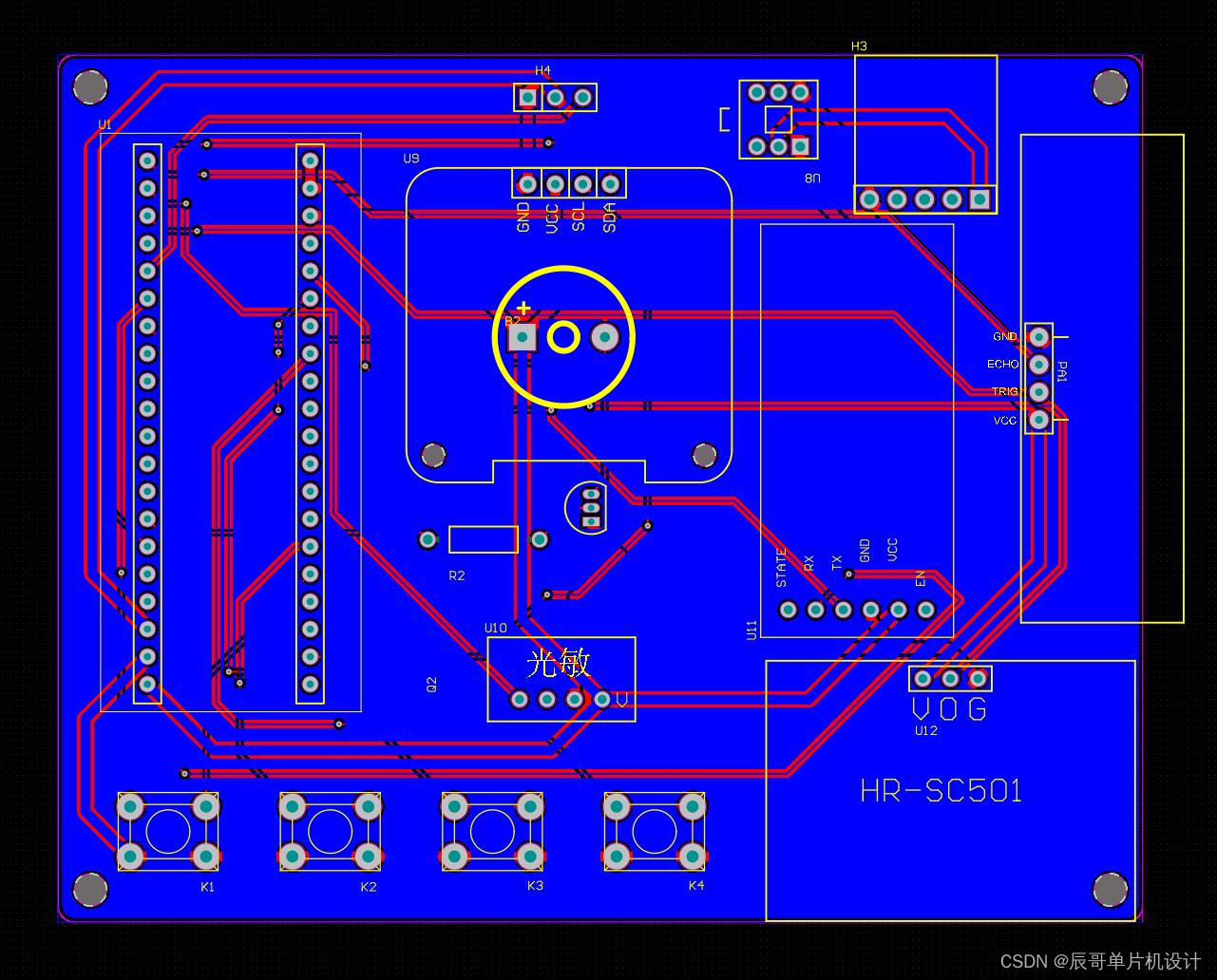
四、PCB硬件设计
1.PCB图
2.PCB板及元器件图
五、程序设计
int main(void)
{
unsigned char p[16]=" ";
u8 datatemp[SIZE];
unsigned int STEP=0; //步数临时替换值
_Bool Heart_OK = 0; //读取到正确心率标志位
unsigned char Heart = 0; //心率值
short temperature = 0; //温度值
STEPS_DIS = 1;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_3);//设置中断优先级分组为组3:2位抢占优先级,2位响应优先级
LED_Init(); //初始化与控制设备连接的硬件接口
OLED_Init(); //OLED初始化
delay_ms(50);
OLED_CLS(); //清屏
OLED_ShowCN(32,2,0); //万事可期(欢迎使用)
OLED_ShowCN(32+16,2,1);
OLED_ShowCN(32+32,2,2);
OLED_ShowCN(32+32+16,2,3);
ADXL345_Init();
while(ADXL345_Init()) //3D加速度传感器初始化
{
OLED_ShowStr(0,0,"ADXL345 Error",2);
delay_ms(200);
OLED_ShowStr(0,0," ",2);
delay_ms(200);
}
while(DS18B20_Init()) //DS18B20初始化
{
OLED_ShowStr(0,0,"DS18B20 Error",2);
delay_ms(200);
OLED_ShowStr(0,0," ",2);
delay_ms(200);
}
delay_ms(100);
while(DS18B20_Get_Temp()==850); //DS18B20刚上电时候 读取的值是850 这里等待 直到不是850才开始下一步
delay_ms(5000);
OLED_CLS(); //清屏
Adc_Init();
TIM3_Int_Init(1999,71); //定时2ms中断
uart_init(9600); //串口一初始化为9600
TIM2_Int_Init(199,7199); //10Khz的计数频率,计数到500为20ms
KEY_Init(); //IO初始化
EXTIX_Init(); //外部中断初始化
OLED_CLS(); //清屏
Dis_Init();
STMFLASH_Read(FLASH_SAVE_ADDR,(u16*)datatemp,SIZE); //flash中读出步数
STEPS = (datatemp[0]-0x30)*10000+(datatemp[1]-0x30)*1000+(datatemp[2]-0x30)*100+(datatemp[3]-0x30)*10+(datatemp[4]-0x30);//读到值转换为步数
RTC_Init();
// RTC_Set(2019,8,5,20,43,55); //设置时间
while(1)
{
if(Timer_Flag==1) //500ms到 读取数据
{
Timer_Flag = 0; //清除标志
TIM_ITConfig(TIM2,TIM_IT_Update,DISABLE ); //使能指定的TIM3中断,允许更新中断
TIM_ITConfig(TIM3,TIM_IT_Update,DISABLE ); //使能指定的TIM3中断,允许更新中断
temperature=DS18B20_Get_Temp(); //读取温度
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
TIM_Cmd(TIM2, ENABLE); //使能TIMx
if (QS == true) //读取到了心率信号
{
QS = false; //清除标志 等待下一次读取
if(BPM>HEART_MIN_ERROR&&BPM<HEART_MAX_ERROR) //读取到的值再正常心率区间 40-160内
{
Heart_OK = 1; //标志位置一
Heart = BPM; //心率传递给Heart
}
else
{
Heart_OK = 0; //标志位清零
Heart = 0; //设置为0
}
}
}
if(ADXL345_FLAG==1) //20ms到?
{
ADXL345_FLAG = 0; //清除标志位
step_counter();
}
// printf("三轴加速器: %d \r\n",ADXL345_FLAG); //串口发送出去
delay_ms(20);
if(STEP!=STEPS) //步数发生改变 存储一次
{
STEP = STEPS;
TEXT_Buffer[0]=(u16)STEPS/10000+0x30;
TEXT_Buffer[1]=(u16)STEPS%10000/1000+0x30;
TEXT_Buffer[2]=(u16)STEPS%10000%1000/100+0x30;
TEXT_Buffer[3]=(u16)STEPS%10000%1000%100/10+0x30;
TEXT_Buffer[4]=(u16)STEPS%10000%1000%100%10+0x30;
STMFLASH_Write(FLASH_SAVE_ADDR,(u16*)TEXT_Buffer,SIZE);
}
if(calendar.hour==0&&calendar.min==0&&(calendar.sec==0||calendar.sec==1||calendar.sec==2)) //凌晨00:00:00 清除步数
{
STEPS = 0;
TEXT_Buffer[0]=(u16)STEPS/10000+0x30;
TEXT_Buffer[1]=(u16)STEPS%10000/1000+0x30;
TEXT_Buffer[2]=(u16)STEPS%10000%1000/100+0x30;
TEXT_Buffer[3]=(u16)STEPS%10000%1000%100/10+0x30;
TEXT_Buffer[4]=(u16)STEPS%10000%1000%100%10+0x30;
STMFLASH_Write(FLASH_SAVE_ADDR,(u16*)TEXT_Buffer,SIZE);
delay_ms(500);
}
Key_set(); //时间设置
if(KEY0==0) //KEY0切换显示按键
{
while(KEY0==0); //等待松开
OLED_CLS(); //清屏
if(Dis_mode==0) //如果上一次是显示心率、步数、体温 的 则显示时间
Dis_mode = 1;
else //如果上一次不是显示心率、步数、体温 的 则心率、步数、体温
{
Dis_mode = 0;
Dis_Init(); //显示汉字信息
}
}
if(KEY2==0) //清除步数
{
while(KEY2==0);
STEPS = 0;
TEXT_Buffer[0]=(u16)'0';
TEXT_Buffer[1]=(u16)'0';
TEXT_Buffer[2]=(u16)'0';
TEXT_Buffer[3]=(u16)'0';
TEXT_Buffer[4]=(u16)'0';
STMFLASH_Write(FLASH_SAVE_ADDR,(u16*)TEXT_Buffer,SIZE); //清除后存储一次数据
}
if(update_flag==1) //2S标志到 发送一次数据到手机APP
{
update_flag = 0;
printf("Step:%5d H:%3d T:%4.1f \r\n",STEPS,Heart,(float)temperature/10); //串口发送出去
}
switch(Dis_mode)
{
case 0: //显示传感器数据
if(STEPS_DIS==1) //刷新计步
{
sprintf((char*)p,":%-5d ",STEPS); //显示步数
OLED_ShowStr(32,2,p,2);
}
sprintf((char*)p,":%4.1f ",(float)temperature/10);
OLED_ShowStr(32,4,p,2); //显示温度
if(Heart_OK==1) //读取到正确心率
{
sprintf((char*)p,":%3dr/min",Heart); //显示心率
OLED_ShowStr(32,0,p,2);
}
else
{
sprintf((char*)p,":---r/min");
OLED_ShowStr(32,0,p,2);
}
break;
case 1: //显示时间 日期等信息
RTC_Display(); //显示时钟
break;
}
}
}
六、实验效果


七、资料内容
















 1735
1735











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









