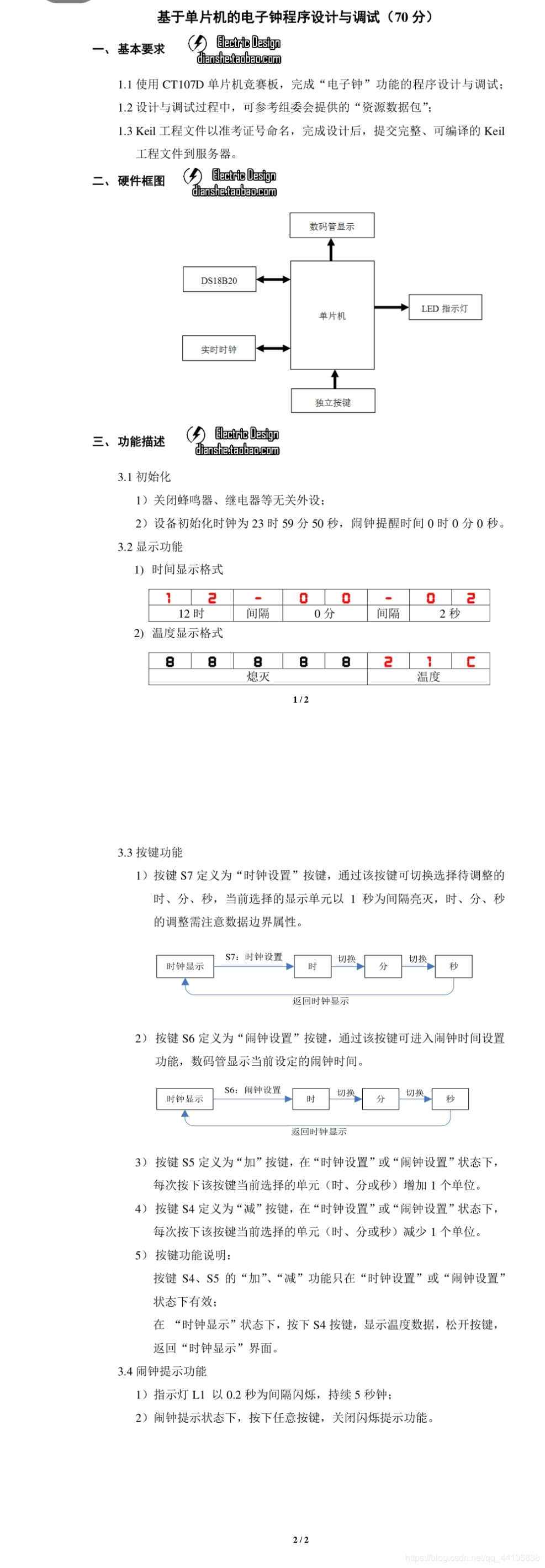
题目
main.c
#include<stc15f2k60s2.h>
#include<intrins.h>
#define uchar unsigned char
#define s0 0
#define s1 1
#define s2 2
uchar get_tempr();
void write_ds1302_main(char time[]);
void write_ds1302_interrupt(char time[]);
char * read_ds1302(void);
uchar semg[13] = {0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90,
0xbf, 0xc6, 0xff};
uchar semg_bit[8] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80};
uchar semg_temp[8] = {12, 12, 12, 12, 12, 12, 12, 12};
char time[2][3] = {{23, 59, 59}, {0, 0, 0}};
uchar state = s0;
uchar state_set = s0;
uchar keycode;
uchar keycount = 3;
uchar alarm = 0;
uchar tempr = 25;
void Delay5ms()
{
unsigned char i, j;
i = 54;
j = 199;
do
{
while (--j);
} while (--i);
}
void allinit()
{
P2 = 0x80; P0 = 0xff;
P2 = 0xa0; P0 = 0x00;
P2 = 0xc0; P0 = 0xff;
P2 = 0xe0; P0 = 0xff;
}
void Timer0Init(void)
{
AUXR |= 0x80;
TMOD &= 0xF0;
TL0 = 0x9A;
TH0 = 0xA9;
TF0 = 0;
TR0 = 1;
EA = 1;
ET0 = 1;
}
void distime(uchar i, int time_dis)
{
if(time_dis < 250)
{
P2 = 0xe0;
P0 = semg[semg_temp[i]];
}
else
{
P2 = 0xe0;
P0 = 0xff;
}
}
void display()
{
static uchar i = 0;
static int time_dis = 0;
if(state == s0)
{
P2 = 0xe0;
P0 = semg[semg_temp[i]];
}
else
{
if(keycount == 0 && (i == 0 || i == 1))
distime(i, time_dis);
else if(keycount == 1 && (i == 3 || i == 4))
distime(i, time_dis);
else if(keycount == 2 && (i == 6 || i == 7))
distime(i, time_dis);
else
{
P2 = 0xe0;
P0 = semg[semg_temp[i]];
}
}
P2 = 0xc0; P0 = semg_bit[i];
P2 = 0x00; P0 = 0xff;
i++; time_dis++;
if(i == 8)
i = 0;
if(time_dis == 500)
time_dis = 0;
}
void led()
{
uchar j;
static uchar state_led = s0;
static int time_led = 0;
switch(state_led)
{
case s0:
{
P0 = 0x00; P2 = 0xa0; P2 = 0x00;
P0 = 0xff; P2 = 0x80; P2 = 0X00;
alarm = 0;
for(j = 0; j < 3; j++)
if(time[0][j] != time[1][j])
{
time_led = 0;
break;
}
if(j == 3)
{
state_led = s1;
alarm = 1;
}
else
state_led = s0;
} break;
case s1:
{
time_led++;
if( (time_led % 100) == 0)
{
if( (time_led / 100) % 2 == 0 )
{
P0 = 0x40; P2 = 0xa0; P2 = 0x00;
P0 = 0xfe; P2 = 0x80; P2 = 0x00;
}
else
{
P0 = 0x00; P2 = 0xa0; P2 = 0x00;
P0 = 0xff; P2 = 0x80; P2 = 0x00;
}
}
if(!alarm || time_led == 2500)
{
state_led = s0;
alarm = 0;
}
} break;
default: state_led = s0; break;
}
P2 = 0x00; P0 = 0xff;
}
void fun() interrupt 1
{
char *time_temp, i, j;
display();
led();
if(state == s0 || (state == s1 && state_set == s1))
{
i++;
if(i == 120)
{
i = 0;
time_temp = read_ds1302();
time[0][0] = time_temp[0];
time[0][1] = time_temp[1];
time[0][2] = time_temp[2];
}
}
else
{
j++;
if(j == 120)
{
j = 0;
write_ds1302_interrupt(time[0]);
}
}
}
char keyscan()
{
uchar trg, keybefore;
static char keyvalue = -1;
P44 = 0; P42 = 0; P35 = 0;
keycode = (P3 ^ 0xff) & 0x0f;
trg = keycode & (keycode ^ keybefore);
keybefore = keycode;
if(trg == 0x01) keyvalue = 7;
else if(trg == 0x02) keyvalue = 6;
else if(trg == 0x04) keyvalue = 5;
else if(trg == 0x08) keyvalue = 4;
else keyvalue = -1;
return keyvalue;
}
void menu(char keyvalue)
{
uchar i;
if((keyvalue != -1) && (alarm == 1))
alarm = 0;
switch(state)
{
case s0:
{
if(keycode == 0x08)
{
for(i =0; i < 5; i++)
semg_temp[i] = 12;
semg_temp[5] = tempr /10;
semg_temp[6] = tempr % 10;
semg_temp[7] = 11;
}
else
{
semg_temp[0] = time[0][0] / 10;
semg_temp[1] = time[0][0] % 10;
semg_temp[2] = 10;
semg_temp[3] = time[0][1] / 10;
semg_temp[4] = time[0][1] % 10;
semg_temp[5] = 10;
semg_temp[6] = time[0][2] / 10;
semg_temp[7] = time[0][2] % 10;
}
if(keyvalue == 7)
{
state = s1;
state_set = s0;
keycount = 0;
}
else if(keyvalue == 6)
{
state = s1;
state_set = s1;
keycount = 0;
}
} break;
case s1:
{
semg_temp[0] = time[state_set][0] / 10;
semg_temp[1] = time[state_set][0] % 10;
semg_temp[2] = 10;
semg_temp[3] = time[state_set][1] / 10;
semg_temp[4] = time[state_set][1] % 10;
semg_temp[5] = 10;
semg_temp[6] = time[state_set][2] / 10;
semg_temp[7] = time[state_set][2] % 10;
if(keyvalue == 4)
{
time[state_set][keycount] = time[state_set][keycount] - 1;
if(keycount == 0)
{
if(time[state_set][keycount] < 0)
time[state_set][keycount] = 23;
}
else
{
if(time[state_set][keycount] < 0)
time[state_set][keycount] = 59;
}
}
else if(keyvalue == 5)
{
time[state_set][keycount] = time[state_set][keycount] + 1;
if(keycount == 0)
{
if(time[state_set][keycount] > 23)
time[state_set][keycount] = 0;
}
else
{
if(time[state_set][keycount] > 59)
time[state_set][keycount] = 0;
}
}
switch(state_set)
{
case s0:
{
if(keyvalue == 7)
{
keycount++;
if(keycount == 3)
{
keycount = 3;
state = s0;
break;
}
}
} break;
case s1:
{
if(keyvalue == 6)
{
keycount++;
if(keycount == 3)
{
keycount = 3;
state = s0;
break;
}
}
} break;
default: state_set = s0; break;
}
} break;
default: state = s0; break;
}
}
void main()
{
static char keyvalue = -1;
write_ds1302_main(time[0]);
allinit();
Timer0Init( );
while(1)
{
keyvalue = keyscan();
menu(keyvalue);
tempr = get_tempr();
Delay5ms();
}
}
ds1302.c
#include <reg52.h>
#include <intrins.h>
#define uchar unsigned char
sbit SCK=P1^7;
sbit SDA=P2^3;
sbit RST = P1^3;
void Write_Ds1302(unsigned char temp)
{
unsigned char i;
for (i=0;i<8;i++)
{
SCK=0;
SDA=temp&0x01;
temp>>=1;
SCK=1;
}
}
void Write_Ds1302_Byte( unsigned char address,unsigned char dat )
{
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
Write_Ds1302(dat);
RST=0;
}
unsigned char Read_Ds1302_Byte ( unsigned char address )
{
unsigned char i,temp=0x00;
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0; _nop_();
SCK=0; _nop_();
SCK=1; _nop_();
SDA=0; _nop_();
SDA=1; _nop_();
return (temp);
}
void write_ds1302_main(char *time)
{
uchar addr, i;
addr = 0x84;
Write_Ds1302_Byte(0x8e, 0x00);
for(i = 0; i < 3; i++)
{
Write_Ds1302_Byte(addr, (time[i]/10)<<4 | time[i] % 10);
addr -= 2;
}
Write_Ds1302_Byte(0x8e, 0x80);
}
void write_ds1302_interrupt(char *time)
{
uchar addr, i;
addr = 0x84;
Write_Ds1302_Byte(0x8e, 0x00);
for(i = 0; i < 3; i++)
{
Write_Ds1302_Byte(addr, (time[i]/10)<<4 | time[i] % 10);
addr -= 2;
}
Write_Ds1302_Byte(0x8e, 0x80);
}
char * read_ds1302()
{
uchar addr, i;
char time[3];
addr = 0x85;
Write_Ds1302_Byte(0x8e, 0x00);
for(i = 0; i < 3; i++)
{
time[i] = Read_Ds1302_Byte(addr);
time[i]= (time[i] / 16) * 10 + time[i] % 16;
addr -= 2;
}
Write_Ds1302_Byte(0x8e, 0x80);
return time;
}
ds18b20.c
#include "reg52.h"
#define uchar unsigned char
sbit DQ = P1^4;
void Delay_OneWire(unsigned int t)
{
unsigned char i;
while(t--)
{
for(i=0;i<12;i++);
}
}
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
uchar get_tempr()
{
uchar high, low;
init_ds18b20( );
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
Delay_OneWire(500);
init_ds18b20( );
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
low = Read_DS18B20();
high = Read_DS18B20();
return (high<<4 | low>>4);
}























 5258
5258

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









